一种多工位供收料的机器人导片设备的制作方法
- 国知局
- 2024-12-26 16:31:25
【】本技术属于硅片制造设备,特别是涉及一种多工位供收料的机器人导片设备。
背景技术
0、背景技术:
1、电池片在生产过程中,有一个工序是导片工序,需要将花篮中的两片硅片进行背靠背叠合后放入到转运舟中。现有技术中专利公开号为cn116281050b公开了一种电池片导片设备和导片方法,其实现的是整片电池片的自动导片上料,且龙门式取放片移载机构布局在归正机构的上方,设备安装不便,龙门式取放片空间灵活性有限,设备维修时较为困难;现有技术中专利公开号为cn115910890b公开了一种半片硅片规整装置、规整设备和搬运设备,实现了半片电池片的自动导片上料,同样采用龙门式取放片移载机构,同样存在上述缺陷。
2、因此有必要提供一种多工位供收料的机器人导片设备来解决上述技术问题。
技术实现思路
0、技术实现要素:
1、本实用新型的主要目的在于提供一种多工位供收料的机器人导片设备,基于多轴机器人配合双工位供收料,实现高效的电池片导片,提高了生产效率,且空间灵活性高,设备维修操作空间大。
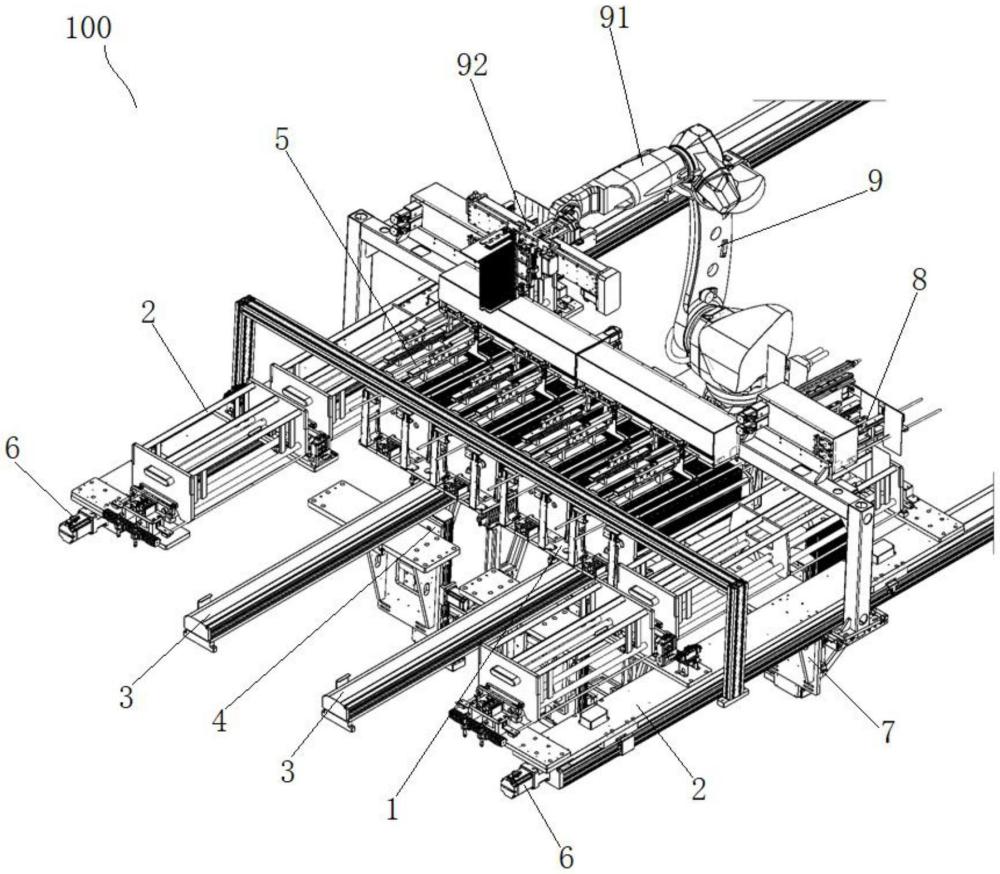
2、本实用新型通过如下技术方案实现上述目的:一种多工位供收料的机器人导片设备,其包括花篮工装与转运舟工装、驱动所述花篮工装在花篮上料工位与花篮供收料工位之间进行前后移载的第一移载机构、在所述花篮供收料工位处将所述花篮工装上花篮中的硅片向上顶起的第一顶托机构、对所述第一顶托机构顶起的硅片进行左右两侧位置归正的第一归正机构、驱动所述转运舟工装在硅片卸料上料工位与转运舟上下料工位之间进行前后移载的第二移载机构、在所述硅片卸料上料工位处将所述转运舟工装上转运舟内的硅片向上顶起的第二顶托机构、对所述第二顶托机构顶起的硅片进行左右两侧位置归正的第二归正机构以及在所述花篮供收料工位与所述硅片卸料上料工位之间实现硅片搬运的多轴机器人搬运机构。
3、进一步的,所述花篮供收料工位并排设置有两个,每个所述花篮供收料工位,均配置有所述第一移载机构、花篮工装、第一顶托机构和第一归正机构;所述硅片卸料上料工位设置有两个,分别设置在两个所述花篮供收料工位的左右外侧,每个所述硅片卸料上料工位处均配置有一个所述第二顶托机构和一个所述第二归正机构。
4、进一步的,所述花篮工装中设置有两个花篮承载位,且承载有两个花篮,且两个花篮中的电池片朝向相反设置。
5、进一步的,所述第一顶托机构包括第一电机、受所述第一电机驱动进行左右运动的第二支撑板、固定在所述第二支撑板上的第二电机、受所述第二电机驱动进行上下运动的第三支撑板以及设置在所述第三支撑板上的两组叉齿顶升治具;两组所述叉齿顶升治具与所述花篮工装中两个花篮中对应排的电池片位置对应。
6、进一步的,所述叉齿顶升治具包括一对底托支架以及沿前后方向等间距排列设置在所述底托支架上的若干格栅挡片。
7、进一步的,所述第一归正机构包括第四支撑板、固定在所述第四支撑板上的第三电机与第四电机、受所述第三电机驱动进行水平传送的第一传动带、受所述第四电机驱动进行水平传动的且平行设置在所述第一传动带下方的第二传动带以及水平滑动设置在所述第四支撑板上的主动归正治具与从动归正治具,所述主动归正治具、所述从动归正治具分别与所述花篮工装中两个花篮中对应排的电池片位置对应。
8、进一步的,所述主动归正治具与所述从动归正治具均包括相互配合进行靠拢或分开运动且对电池片左右两侧进行位置限位的第一归正组件与第二归正组件,所述主动归正治具中的第一归正组件与所述第一传动带固定连接且通过第一连杆与所述从动归正治具中的第一归正组件连接在一起;所述主动归正治具中的第二归正组件与所述第二传动带固定连接且通过第二连杆与所述从动归正治具中的第二归正组件连接在一起。
9、进一步的,所述第一归正组件与所述第二归正组件均包括第五支撑板、沿前后方向等间距排列设置在所述第五支撑板上的若干定位侧齿以及设置在所述第五支撑板下方的底托板。
10、进一步的,所述多轴机器人搬运机构包括多轴机器人以及设置在所述多轴机器人活动末端的搬运吸附模组;所述搬运吸附模组包括固定在所述多轴机器人活动末端的第七支撑板、固定在所述第七支撑板上的第五电机以及受所述第五电机驱动进行左右相互靠拢或相互分开运动的两组吸取单元。
11、进一步的,所述吸取单元包括受所述第五电机驱动进行左右运动的第八支撑板、固定在所述第八支撑板上的第六电机、受所述第六电机驱动进行前后运动的第九支撑板以及设置在所述第九支撑板上的吸盘组件。
12、与现有技术相比,本实用新型一种多工位供收料的机器人导片设备的有益效果在于:通过设置多轴机器人配合搬运吸附模组,实现高效的硅片搬运,将花篮供收料工位与硅片卸料上料工位设置在多轴机器人的工作范围内,以便能够实现硅片在花篮与转运舟之间进行高效导片;本设备设置为双工位花篮供收料,实现硅片的无间断性连续供料,提高供料效率;同时还设置有两个转运舟上下料工位,实现镀膜设备的双进双出或“一侧进、一侧出”的结构,配合双工位花篮供收料和多轴机器人硅片搬运,大大提高了硅片导片效率;采用多轴机器人实现硅片在花篮与转运舟之间的搬运移载,空间灵活性强,当设备需要维修保养时,具有更佳的维修操作空间。
技术特征:1.一种多工位供收料的机器人导片设备,其特征在于:其包括花篮工装与转运舟工装、驱动所述花篮工装在花篮上料工位与花篮供收料工位之间进行前后移载的第一移载机构、在所述花篮供收料工位处将所述花篮工装上花篮中的硅片向上顶起的第一顶托机构、对所述第一顶托机构顶起的硅片进行左右两侧位置归正的第一归正机构、驱动所述转运舟工装在硅片卸料上料工位与转运舟上下料工位之间进行前后移载的第二移载机构、在所述硅片卸料上料工位处将所述转运舟工装上转运舟内的硅片向上顶起的第二顶托机构、对所述第二顶托机构顶起的硅片进行左右两侧位置归正的第二归正机构以及在所述花篮供收料工位与所述硅片卸料上料工位之间实现硅片搬运的多轴机器人搬运机构。
2.如权利要求1所述的多工位供收料的机器人导片设备,其特征在于:所述花篮供收料工位并排设置有两个,每个所述花篮供收料工位,均配置有所述第一移载机构、花篮工装、第一顶托机构和第一归正机构;所述硅片卸料上料工位设置有两个,分别设置在两个所述花篮供收料工位的左右外侧,每个所述硅片卸料上料工位处均配置有一个所述第二顶托机构和一个所述第二归正机构。
3.如权利要求1所述的多工位供收料的机器人导片设备,其特征在于:所述花篮工装中设置有两个花篮承载位,且承载有两个花篮,且两个花篮中的电池片朝向相反设置。
4.如权利要求3所述的多工位供收料的机器人导片设备,其特征在于:所述第一顶托机构包括第一电机、受所述第一电机驱动进行左右运动的第二支撑板、固定在所述第二支撑板上的第二电机、受所述第二电机驱动进行上下运动的第三支撑板以及设置在所述第三支撑板上的两组叉齿顶升治具;两组所述叉齿顶升治具与所述花篮工装中两个花篮中对应排的电池片位置对应。
5.如权利要求4所述的多工位供收料的机器人导片设备,其特征在于:所述叉齿顶升治具包括一对底托支架以及沿前后方向等间距排列设置在所述底托支架上的若干格栅挡片。
6.如权利要求3所述的多工位供收料的机器人导片设备,其特征在于:所述第一归正机构包括第四支撑板、固定在所述第四支撑板上的第三电机与第四电机、受所述第三电机驱动进行水平传送的第一传动带、受所述第四电机驱动进行水平传动的且平行设置在所述第一传动带下方的第二传动带以及水平滑动设置在所述第四支撑板上的主动归正治具与从动归正治具,所述主动归正治具、所述从动归正治具分别与所述花篮工装中两个花篮中对应排的电池片位置对应。
7.如权利要求6所述的多工位供收料的机器人导片设备,其特征在于:所述主动归正治具与所述从动归正治具均包括相互配合进行靠拢或分开运动且对电池片左右两侧进行位置限位的第一归正组件与第二归正组件,所述主动归正治具中的第一归正组件与所述第一传动带固定连接且通过第一连杆与所述从动归正治具中的第一归正组件连接在一起;所述主动归正治具中的第二归正组件与所述第二传动带固定连接且通过第二连杆与所述从动归正治具中的第二归正组件连接在一起。
8.如权利要求7所述的多工位供收料的机器人导片设备,其特征在于:所述第一归正组件与所述第二归正组件均包括第五支撑板、沿前后方向等间距排列设置在所述第五支撑板上的若干定位侧齿以及设置在所述第五支撑板下方的底托板。
9.如权利要求1所述的多工位供收料的机器人导片设备,其特征在于:所述多轴机器人搬运机构包括多轴机器人以及设置在所述多轴机器人活动末端的搬运吸附模组;所述搬运吸附模组包括固定在所述多轴机器人活动末端的第七支撑板、固定在所述第七支撑板上的第五电机以及受所述第五电机驱动进行左右相互靠拢或相互分开运动的两组吸取单元。
10.如权利要求9所述的多工位供收料的机器人导片设备,其特征在于:所述吸取单元包括受所述第五电机驱动进行左右运动的第八支撑板、固定在所述第八支撑板上的第六电机、受所述第六电机驱动进行前后运动的第九支撑板以及设置在所述第九支撑板上的吸盘组件。
技术总结本技术公开了一种多工位供收料的机器人导片设备,其包括花篮工装与转运舟工装、驱动花篮工装进行前后移载的第一移载机构、将花篮工装上花篮中的硅片向上顶起的第一顶托机构、对第一顶托机构顶起的硅片进行左右两侧位置归正的第一归正机构、驱动转运舟工装进行前后移载的第二移载机构、将转运舟工装上转运舟内的硅片向上顶起的第二顶托机构、对第二顶托机构顶起的硅片进行左右两侧位置归正的第二归正机构以及在花篮供收料工位与硅片卸料上料工位之间实现硅片搬运的多轴机器人搬运机构。本技术基于多轴机器人配合双工位供收料,实现高效的电池片导片,提高了生产效率,且空间灵活性高,设备维修操作空间大。技术研发人员:沈威,杨哲,石磊受保护的技术使用者:苏州诚拓智能装备有限公司技术研发日:20240131技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/349950.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表