一种可自主移动式户外垃圾桶的控制方法及装置与流程
- 国知局
- 2024-12-26 14:49:24
本技术涉及数据处理的,具体涉及一种可自主移动式户外垃圾桶的控制方法及装置。
背景技术:
1、在当前的封闭园区管理中,垃圾桶作为重要的环境卫生设施,其布局和管理直接关系到园区的整洁和美观。
2、目前,现有的技术中,封闭园区内的垃圾桶通常采用固定在某一个位置的方式,这种方式虽然在一定程度上方便了居民和访客投放垃圾,但同时也带来了一系列问题。固定的垃圾桶位置需要专人进行定期维护和清理,这无疑增加了园区管理的人力成本,导致清洁效率较低。
3、因此,急需一种可自主移动式户外垃圾桶的控制方法及装置。
技术实现思路
1、本技术提供了一种可自主移动式户外垃圾桶的控制方法及装置,便于提高清洁效率。
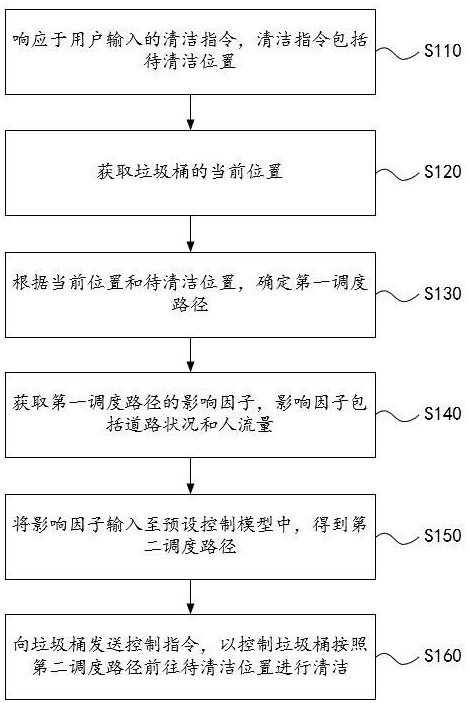
2、在本技术的第一方面提供了一种可自主移动式户外垃圾桶的控制方法,所述方法包括:响应于用户输入的清洁指令,所述清洁指令包括待清洁位置;获取所述垃圾桶的当前位置;根据所述当前位置和所述待清洁位置,确定第一调度路径;获取所述第一调度路径的影响因子,所述影响因子包括道路状况和人流量;将所述影响因子输入至预设控制模型中,得到第二调度路径;向所述垃圾桶发送控制指令,以控制所述垃圾桶按照所述第二调度路径前往所述待清洁位置进行清洁。
3、通过采用上述技术方案,系统能够迅速响应用户的清洁指令,并根据用户指定的待清洁位置进行工作。这种个性化的服务方式满足了用户对于特定区域清洁的即时需求。系统首先确定从垃圾桶当前位置到待清洁位置的第一调度路径。随后,通过考虑道路状况和人流量等影响因子,系统能够进一步优化路径规划,选择更为合理、高效的第二调度路径。这有助于减少不必要的行驶时间和资源消耗。系统能够适应不同的道路状况和人流量,通过智能的路径规划和优化,垃圾桶能够更快速、更准确地前往待清洁位置进行清洁工作。这不仅可以提高清洁效率,还可以减少清洁人员的工作量,降低人力成本。智能的垃圾桶管理系统能够为用户提供更加便捷、高效的清洁服务。用户只需通过简单的指令即可触发清洁任务,无需亲自前往或等待清洁人员。这种提升用户体验的方式有助于增加用户对于园区管理服务的满意度。通过智能的路径规划和优化,系统能够避免不必要的行驶和空驶,从而减少能源消耗和资源浪费,便于提高清洁效率。
4、可选地,在所述响应于用户输入的清洁指令之前,所述方法还包括:接收传感器设备发送的图像数据;根据所述图像数据,确定所述图像数据对应的基础特征图;基于多尺度通道注意力机制,对所述基础特征图进行多尺度特征提取,得到多尺度特征图;根据所述多尺度特征图,得到所述图像数据的显著区域;计算所述显著区域与预设待清洁区域之间的相似度值,所述预设待清洁区域由需要进行清洁的图像确定;若确定所述相似度值大于或等于预设相似度阈值,则展示提示信息,所述提示信息用于提示所述用户需要对所述图像数据对应的位置进行清洁。
5、通过采用上述技术方案,系统能够自动接收传感器设备发送的图像数据,并通过图像处理技术提取图像中的关键特征。这大大减少了人工检查和识别的需求,提高了清洁工作的自动化水平。使用多尺度通道注意力机制对基础特征图进行多尺度特征提取,意味着系统能够捕捉到图像中不同尺度的信息。这有助于更准确地识别出显著区域,因为清洁需求可能涉及不同大小的物体或区域。基于多尺度特征图,系统能够确定图像中的显著区域。这些区域通常是与背景相比更突出、更可能需要清洁的部分。这种显著区域检测提高了清洁任务的针对性和准确性。通过计算显著区域与预设待清洁区域之间的相似度值,系统能够判断当前图像是否包含需要清洁的区域。如果相似度达到或超过预设阈值,系统会显示提示信息,提醒用户进行清洁。这种及时的提示有助于用户快速响应并处理清洁需求。由于系统能够自动识别和定位需要清洁的区域,用户无需花费大量时间搜索和判断。这大大提高了清洁工作的效率,减少了不必要的劳动和时间浪费。通过提供及时的提示和准确的清洁指导,系统能够增强用户的使用体验。用户可以更加便捷地完成清洁任务,同时享受到智能化服务带来的便利和舒适。
6、可选地,所述根据所述当前位置和所述待清洁位置,确定第一调度路径,具体包括:根据所述当前位置,计算得到当前区域,其中,以所述当前位置对应的坐标点为圆心,半径为预设长度作圆形区域,得到所述当前区域,所述预设长度根据所述垃圾桶的体积确定;根据所述待清洁位置,计算得到待清洁区域,其中,所述待清洁区域包含所述待清洁位置对应的垃圾轮廓;获取所述垃圾桶的实时移动方向;根据所述实时移动方向,确定所述当前区域至所述待清洁区域对应的轮廓之间的调度路径,得到所述第一调度路径。
7、通过采用上述技术方案,通过以垃圾桶当前位置为圆心,设定预设长度的圆形区域作为当前区域,系统能够准确地划定一个影响范围。这种方式不仅考虑了垃圾桶的物理尺寸,还为其移动和清洁工作提供了一个合理的边界。待清洁区域是根据待清洁位置及其对应的垃圾轮廓来确定的。这意味着系统不仅知道清洁的目标点,还能识别出该点周围的污染范围,从而确保清洁的彻底性。获取垃圾桶的实时移动方向,并基于这一信息来确定调度路径,是一种高效且智能的做法。这可以减少不必要的转向和绕行,提高清洁效率。根据实时移动方向和待清洁区域的轮廓来确定调度路径,意味着系统能够生成一条贴合实际清洁需求的路径。这种路径既考虑了垃圾桶的当前状态,又考虑了待清洁区域的具体情况,从而确保清洁工作的有效性和高效性。通过上述步骤,系统能够生成一条既合理又高效的调度路径。这不仅可以减少清洁时间,还可以降低清洁成本,提高整个清洁工作的效率。
8、可选地,所述获取所述第一调度路径的影响因子,具体包括:获取目标监控设备发送的原始图像数据,所述目标监控设备位于所述第一调度路径上;对所述原始图像数据进行预处理,得到分类图像数据,所述预处理包括去噪、滤波、特征提取以及归一化处理;根据所述分类图像数据,得到所述影响因子。
9、通过采用上述技术方案,通过获取目标监控设备发送的原始图像数据,系统能够实时感知第一调度路径上的环境状况。这对于确保清洁工作的顺利进行至关重要,因为不同的环境状况可能需要不同的清洁策略。对原始图像数据进行预处理,包括去噪、滤波、特征提取以及归一化处理,可以显著提高后续分析的准确性。去噪和滤波可以消除图像中的干扰信息,特征提取可以突出关键信息,而归一化处理则使得不同来源或不同时间点的数据具有可比性。根据预处理后的分类图像数据,系统能够提取出第一调度路径上的影响因子。通过考虑这些影响因子,系统可以优化调度路径,避免拥堵或危险区域,提高清洁效率。同时,也可以减少因环境因素导致的清洁设备损坏或安全事故的风险。这些基于图像数据提取的影响因子可以为系统的智能决策提供支持。例如,如果系统检测到某段路径上的人流量较大,它可能会选择避开该区域或调整清洁时间,以减少对行人的干扰。
10、可选地,所述根据所述分类图像数据,得到所述影响因子,具体包括:对所述分类图像数据进行角点检测,得到形状特征数据;对形状特征数据进行轮廓提取,得到边缘轮廓数据;对边缘轮廓数据进行特征编码,得到具象特征数据,所述具象特征数据包括路面坑洼、障碍物以及生物实体;基于所述路面坑洼和所述障碍物,得到所述道路状况;基于所述生物实体,计算得到所述人流量。
11、通过采用上述技术方案,通过角点检测,系统能够识别出图像中的关键点和形状特征。这些特征对于后续的轮廓提取和特征编码至关重要,因为它们代表了图像中物体的基本结构和形态。基于角点检测得到的形状特征数据,系统能够进一步提取出物体的边缘轮廓。这些边缘轮廓数据能够更精确地描绘出图像中物体的实际边界,为后续的特征编码和分类提供基础。对边缘轮廓数据进行特征编码,将抽象的轮廓信息转化为具体的、可量化的具象特征数据。这些具象特征数据包括路面坑洼、障碍物以及生物实体等,它们直接反映了调度路径上的实际状况。基于路面坑洼和障碍物的具象特征数据,系统能够评估出调度路径上的道路状况。这些信息对于确定清洁设备的行驶速度、避免潜在风险等具有重要意义,可以确保清洁工作的顺利进行。通过识别和分析生物实体的具象特征数据,系统能够计算出调度路径上的人流量。人流量是评估调度路径拥挤程度和确定最佳清洁时间的重要参数,可以帮助系统避免在高峰期进行清洁,减少对人类活动的干扰。
12、可选地,所述将所述影响因子输入至预设控制模型中,得到第二调度路径,具体包括:基于所述影响因子与畅通概率之间的对应关系,得到所述第一调度路径对应的畅通概率,所述预设控制模型中预先存储有所述对应关系,所述畅通概率基于历史调度路径对应的历史畅通概率计算得到;若确定所述畅通概率小于预设概率阈值,则对所述第一调度路径进行路径修正,得到所述第二调度路径,所述第二调度路径的畅通概率大于所述第一调度路径对应的畅通概率。
13、通过采用上述技术方案,系统使用畅通概率作为选择调度路径的关键指标。畅通概率是基于历史调度路径对应的历史畅通概率计算得到的,这意味着系统能够利用过去的经验来预测当前或未来路径的畅通情况。这种基于历史数据的决策方式更加可靠和有效。当第一调度路径的畅通概率低于预设的概率阈值时,系统会立即进行路径修正,生成第二调度路径。这种实时修正能够确保系统始终选择畅通性更高的路径,从而提高清洁工作的效率和安全性。通过选择畅通性更高的调度路径,系统能够减少清洁过程中的等待时间和障碍物干扰,为用户提供更加高效和顺畅的清洁服务。这有助于提升用户的满意度和体验。选择畅通性更高的路径意味着清洁设备能够更快地到达目的地并完成清洁任务。这减少了不必要的延误和绕行,提高了清洁工作的整体效率。在畅通性较低的路径上行驶可能会增加清洁设备的损耗和故障风险。通过选择畅通性更高的路径,系统能够降低这些风险,延长设备的使用寿命。
14、可选地,所述清洁指令还包括目标调度路径,所述方法还包括:向所述垃圾桶发送目标控制指令,以控制所述垃圾桶按照所述目标调度路径前往所述待清洁位置进行清洁,所述目标调度路径经过多个所述待清洁位置,所述目标调度路径由所述用户规划确定得到。
15、通过采用上述技术方案,允许用户自行规划目标调度路径,使得清洁工作更加符合用户的实际需求。用户可以根据清洁区域的具体情况,如脏污程度、障碍物分布等,来定制最佳的调度路径。通过用户规划的目标调度路径,可以确保垃圾桶能够按照最优的路线进行清洁,减少不必要的绕行和重复工作,从而提高清洁效率。用户可以根据需要随时调整目标调度路径,以适应不同的清洁需求。虽然目标调度路径是由用户规划的,但整个清洁过程仍然是由智能系统控制的。系统可以根据用户提供的路径,自动调整垃圾桶的移动速度、清洁方式等参数,实现智能化的清洁操作。通过允许用户规划目标调度路径,系统能够更好地满足用户的个性化需求,提供更加贴心、便捷的清洁服务。这不仅可以提高用户的满意度,还可以增强用户对智能清洁系统的信任感和依赖度。一旦用户规划了目标调度路径并发送了目标控制指令,垃圾桶就可以自动按照该路径进行清洁,无需用户进行持续的监控和干预。这降低了用户的使用门槛,使得清洁工作更加轻松、简单。
16、在本技术的第二方面提供了一种可自主移动式户外垃圾桶的控制装置,所述控制装置包括获取模块和处理模块,其中,所述获取模块,用于响应于用户输入的清洁指令,所述清洁指令包括待清洁位置;所述获取模块,还用于获取所述垃圾桶的当前位置;所述处理模块,用于根据所述当前位置和所述待清洁位置,确定第一调度路径;所述获取模块,还用于获取所述第一调度路径的影响因子,所述影响因子包括道路状况和人流量;所述处理模块,还用于将所述影响因子输入至预设控制模型中,得到第二调度路径;所述处理模块,还用于向所述垃圾桶发送控制指令,以控制所述垃圾桶按照所述第二调度路径前往所述待清洁位置进行清洁。
17、在本技术的第三方面提供了一种电子设备,所述电子设备包括处理器、存储器、用户接口以及网络接口,所述存储器用于存储指令,所述用户接口和所述网络接口均用于给其他设备通信,所述处理器用于执行所述存储器中存储的指令,以使所述电子设备执行如上所述的方法。
18、在本技术的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有指令,当所述指令被执行时,执行如上所述的方法。
19、综上所述,本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
20、系统能够迅速响应用户的清洁指令,并根据用户指定的待清洁位置进行工作。这种个性化的服务方式满足了用户对于特定区域清洁的即时需求。系统首先确定从垃圾桶当前位置到待清洁位置的第一调度路径。随后,通过考虑道路状况和人流量等影响因子,系统能够进一步优化路径规划,选择更为合理、高效的第二调度路径。这有助于减少不必要的行驶时间和资源消耗。系统能够适应不同的道路状况和人流量,通过智能的路径规划和优化,垃圾桶能够更快速、更准确地前往待清洁位置进行清洁工作。这不仅可以提高清洁效率,还可以减少清洁人员的工作量,降低人力成本。智能的垃圾桶管理系统能够为用户提供更加便捷、高效的清洁服务。用户只需通过简单的指令即可触发清洁任务,无需亲自前往或等待清洁人员。这种提升用户体验的方式有助于增加用户对于园区管理服务的满意度。通过智能的路径规划和优化,系统能够避免不必要的行驶和空驶,从而减少能源消耗和资源浪费,便于提高清洁效率。
本文地址:https://www.jishuxx.com/zhuanli/20241226/343548.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表