一种执行器故障下机器人编队安全约束距离控制方法
- 国知局
- 2024-12-06 12:33:10
本发明涉及机器人编队安全约束距离控制领域,尤其涉及一种执行器故障下机器人编队安全约束距离控制方法。
背景技术:
1、自1956年机器人问世以来,经过近70年的发展,机器人已经广泛应用在航空航天、汽车工业等高科技行业。移动机器人是机器人中的重要分支且有广阔的应用空间。随着计算机技术、传感器技术和机器人控制技术的不断进步,移动机器人得到了快速发展。近几年移动机器人的应用领域也不断扩展,包括军事、医疗、工业、服务机器人等领域。在军事领域,移动机器人可以用于侦察、搜索、拆弹等任务;在医疗领域,移动机器人可以用于手术、康复和监测等任务;在工业领域,移动机器人可以用于自动化生产线、仓储管理等任务;在服务机器人领域,移动机器人可以用于清洁、安保、导览等任务。
2、由于环境和任务的复杂性,单个机器人的工作局限也越来越明显。比如作业范围小、信息无法共享、资源利用率低等局限,这都会增加任务成本和风险。多移动机器人编队相对于单个机器人,能够协同完成任务,相互之间能够共享信息和任务,从而提高任务效率。编队能够进行协同和相互通讯,从而在出现某个机器人失效的情况下,其他机器人可以接替它的任务,保证了任务的可靠性。此外,多移动机器人编队还能够根据任务的需要,实现自主、协作和集群的工作方式,增强了执行任务的灵活性。
3、系统能稳定可靠并安全运行是机器人系统控制追求的目标之一。实际的机器人在执行任务时必须满足一系列约束条件,以确保机器人在运动过程中能够保持稳定和安全。机器人的约束可以分为内部约束和外部约束。内部约束主要包括移动机器人的控制输入存在饱和受限、移动机器人未装配某些传感器而不能获得某些信息,如绝对速度传感器、相对速度传感器等,还有移动机器人的系统状态的变化范围受限等。
4、多移动机器人系统在运动过程中,除了内部约束外,还要考虑外部的运动安全约束。特别是对于编队机器人系统,由于多个领导者和跟随者的存在,多移动机器人之间和与环境中的障碍物之间的避障显得尤为重要。外部约束包括避免移动机器人之间的相互碰撞和移动机器人与障碍物之间的碰撞。目前,对于单个移动机器人系统的安全约束研究已经有了一定的成果,但对于编队协同控制问题,考虑安全约束的研究还比较有限。
5、多移动机器人系统与单个移动机器人系统最本质的区别是多移动机器人系统内各个移动机器人之间的动力学耦合,这种耦合是由移动机器人之间的信息交互所导致的。通过协同式的信息交互,多移动机器人系统可以实现期望的运动行为,因此信息交互过程对于多移动机器人系统能否完成期望任务非常关键。但是,移动机器人之间的信息交互往往受到多种限制,例如通讯延迟、数据丢失、采样量化、离散通信等。尤其对于大规模编队系统来说,这些限制因素更加不可忽视,因为编队系统内有多个领导者和跟随者,通信拓扑结构比较复杂,移动机器人数量较多。
6、除了通信故障外,执行器故障也时常发生。在实际工程控制系统中,执行器需要长时间连续不间断地输出信号和能量,因此容易发生物理性损耗,导致执行器故障。此外,由于经济成本等因素,系统不能总是得到及时检修,元器件也不能频繁更换,因此执行器故障在工程实际中很普遍,而且此类执行器故障发生的时间和故障程度很难测量,这给控制器设计带来很大困难。一旦发生执行器故障,系统通常会出现性能下降,导致不稳定的情况,甚至导致灾难性事故和不可估计的经济损失。随着机器人结构越来越复杂,编队数量越来越多,在机器人系统运行过程中,故障发生的频率也越来越多。
技术实现思路
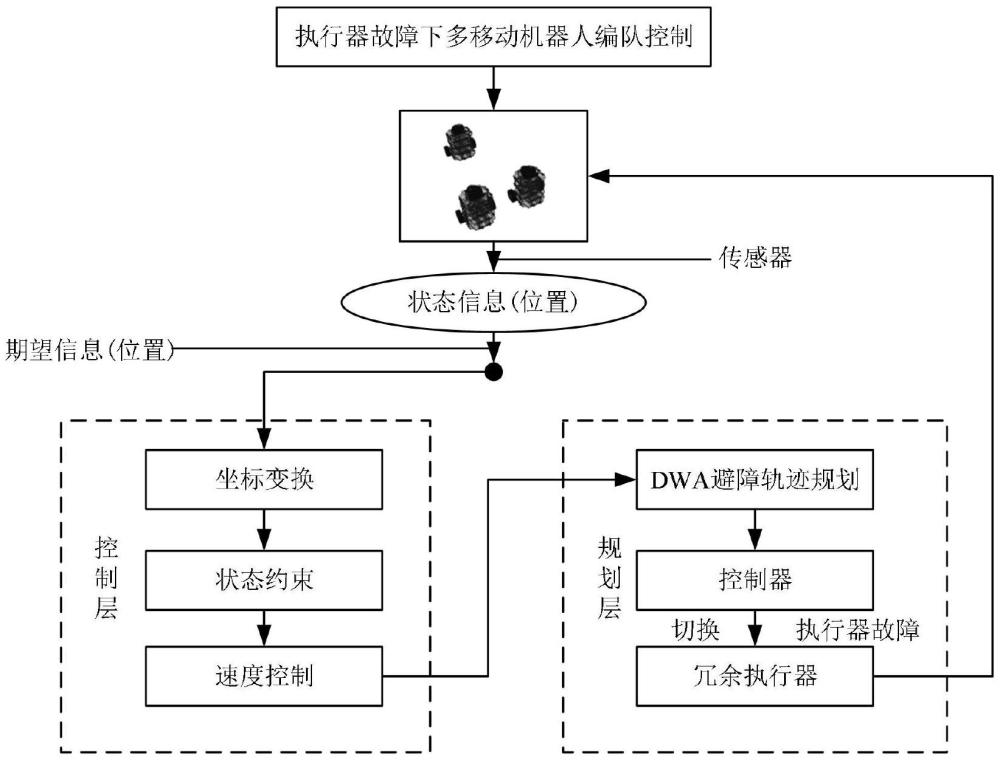
1、为了解决安全约束下的编队控制问题,本发明提供了一种执行器故障下机器人编队安全约束距离控制方法,该方法主要包括:控制层、规划层;
2、控制层:根据机器人实际状态位置信息和期望信息做差得到偏差值,将实际状态位置坐标转换后进行状态约束和速度控制;
3、规划层:得到速度控制输入后,利用dwa避障轨迹规划算法对控制器进行速度控制,生成轨迹,当有执行器故障发生时,设计执行器故障下安全约束控制器,采用冗余执行器进行编队控制,用于保证机器人在完成编队目标的同时躲避障碍物和其他机器人。
4、一种存储设备,所述存储设备存储指令及数据用于实现一种执行器故障下机器人编队安全约束距离控制方法。
5、一种执行器故障下机器人编队安全约束距离控制设备,包括:处理器及存储设备;所述处理器加载并执行所述存储设备中的指令及数据用于实现一种执行器故障下机器人编队安全约束距离控制方法。
6、本发明提供的技术方案带来的有益效果是:本发明针对含执行器故障的轮式多机器人编队系统,提出了执行器故障下机器人编队安全约束距离控制方法,结合机器人实际环境来修正并输出更安全稳定的速度控制,保证机器人完成目标的同时可以躲避障碍物和其他机器人。同时,针对执行器故障的机器人系统,提出了自适应备份执行器切换的方案,并引入误差转换函数来解决因执行器故障切换引起的跟踪误差超过约束的问题。最后通过数值仿真验证了规划器和控制器的有效性。本发明解决了安全约束下的编队控制问题,当机器人的传感器失效或故障时,通过其他传感器来规划机器人的路径,从而避免机器人与障碍物碰撞,保证机器人的安全运动。当有执行器故障时,控制器采用故障检测和纠正算法,重新调整机器人的控制参数,以确保机器人的稳定运动。
技术特征:1.一种执行器故障下机器人编队安全约束距离控制方法,其特征在于:该方法包括:控制层、规划层;
2.如权利要求1所述的一种执行器故障下机器人编队安全约束距离控制方法,其特征在于:利用dwa避障轨迹规划算法生成轨迹由三部分组成:
3.如权利要求2所述的一种执行器故障下机器人编队安全约束距离控制方法,其特征在于:代价函数为:
4.如权利要求1所述的一种执行器故障下机器人编队安全约束距离控制方法,其特征在于:设计执行器故障下安全约束控制器的过程如下:
5.如权利要求4所述的一种执行器故障下机器人编队安全约束距离控制方法,其特征在于:控制目标是:设计基于距离的控制器,使每个机器人的状态误差满足:
6.如权利要求4所述的一种执行器故障下机器人编队安全约束距离控制方法,其特征在于:机器人编队系统的状态误差约束目标为:
7.如权利要求6所述的一种执行器故障下机器人编队安全约束距离控制方法,其特征在于:当执行器故障时,冗余执行器开始工作,为解决机器人编队系统可能失控的问题,定义一个切换函数:
8.一种存储设备,其特征在于:所述存储设备存储指令及数据用于实现权利要求1~7任一项所述的执行器故障下机器人编队安全约束距离控制方法。
9.一种执行器故障下机器人编队安全约束距离控制设备,其特征在于:包括:处理器及存储设备;所述处理器加载并执行所述存储设备中的指令及数据用于实现权利要求1~7任一项所述的执行器故障下机器人编队安全约束距离控制方法。
技术总结本发明提供了一种执行器故障下机器人编队安全约束距离控制方法,涉及机器人编队安全约束距离控制领域,该方法包括:控制层、规划层;控制层:根据机器人实际状态位置信息和期望信息做差得到偏差值,将实际状态位置坐标转换后进行状态约束和速度控制;规划层:得到速度控制输入后,利用DWA避障轨迹规划算法对控制器进行速度控制,生成轨迹,当有执行器故障发生时,设计执行器故障下安全约束控制器,采用冗余执行器进行编队控制,用于保证机器人在完成编队目标的同时躲避障碍物和其他机器人。本发明的有益效果是:解决了安全约束下的编队控制问题,避免机器人与障碍物碰撞,保证机器人的安全运动和稳定运动。技术研发人员:郑世祺,原一介,邓宇书,周谦,粟涛,宫馨雨,李志鹏受保护的技术使用者:中国地质大学(武汉)技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/342061.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表