面向航迹欺骗的无人机集群欺骗策略与航迹联合优化方法
- 国知局
- 2024-12-06 12:30:36
本发明涉及无人机集群控制技术,具体涉及面向航迹欺骗的无人机集群欺骗策略与航迹联合优化方法。
背景技术:
1、在电子对抗领域作战中,组网雷达因其较强的反侦察能力、抗压制干扰能力、抗欺骗干扰能力得到了较为广泛的应用。利用无人机集群对组网雷达进行航迹欺骗干扰已成为一种高级有源干扰方式。无人机通过其搭载数字射频存储器对截获的敌方雷达信号进行调制和延迟转发,使敌方雷达识别到虚假目标,多个连续的虚假目标点则可以形成一条虚假航迹。然而,由于组网雷达的“同源检验”策略,虚假目标需同时被多部雷达识别才可被融合中心认定为合理航迹点,因此需要对无人机集群进行合理的航迹规划,使其相互协同对组网雷达中的各部雷达进行欺骗干扰。
2、目前,国内外诸多学者对无人机集群航迹欺骗技术进行了较为深入的研究,然而现有研究成果仍存在以下缺陷:(1)无人机集群中各架无人机利用率较低,每架无人机仅产生一个虚假目标,实施航迹欺骗时生成的虚假航迹数量较少;(2)低速无人机集群难以产生高速战机类虚假目标。
技术实现思路
1、发明目的:本发明的目的是提供一种面向航迹欺骗的无人机集群欺骗策略与航迹联合优化方法,使低速无人机集群产生尽可能多的高速虚假航迹。
2、技术方案:本发明所述的面向航迹欺骗的无人机集群欺骗策略与航迹联合优化方法,包括以下步骤:
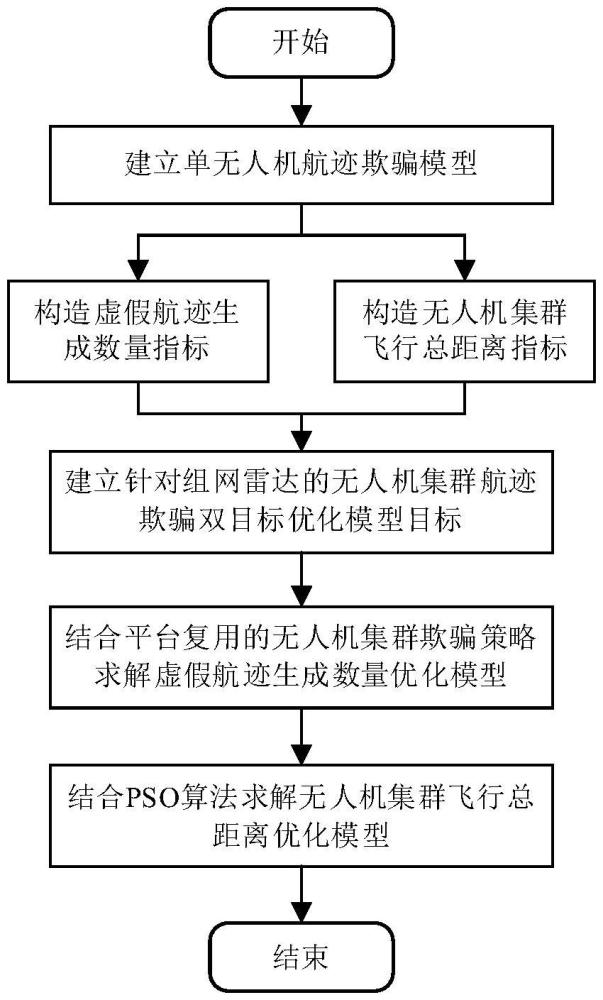
3、s1、建立单无人机航迹欺骗模型;
4、s2、构造以无人机集群欺骗策略和无人机集群航迹为优化变量的虚假航迹生成数量指标;
5、s3、构造以虚假航迹旋转角度和无人机集群航迹为优化变量的无人机集群飞行总距离指标;
6、s4、以最大化虚假航迹生成数量和最小化无人机集群飞行总距离为优化目标,以无人机飞行动力学性能为约束条件,建立针对组网雷达的无人机集群航迹欺骗双目标优化模型;
7、s5、结合平台复用的无人机集群欺骗策略和粒子群优化pso算法对步骤s4中建立的针对组网雷达的无人机集群航迹欺骗双目标优化模型进行求解;包括:首先将优化模型分解为虚假航迹生成数量优化模型以及无人机集群飞行总距离优化模型;结合平台复用的无人机集群欺骗策略对虚假航迹生成数量优化模型进行求解;结合pso算法对无人机集群飞行总距离优化模型进行求解;最终输出优化结果。
8、进一步的,步骤s1中建立的单无人机航迹欺骗模型为:
9、
10、其中,ek+1表示(k+1)时刻无人机坐标点;e'k+1表示(k+1)时刻与虚假目标速度方向相同的假想无人机坐标点;表示ek+1到e'k+1的向量;表示的单位向量;fk+1表示(k+1)时刻虚假目标坐标点;θ表示无人机速度方向与虚假目标速度方向夹角,若θ>0,ek+1位于e'k+1上方,反之ek+1位于e'k+1下方。
11、进一步的,ek+1与e'k+1间距离表示为:
12、
13、其中,ek表示k时刻无人机坐标点,表示ek到e'k+1的向量,表示∠eke'k+1ek+1:
14、
15、其中,fk表示k时刻虚假目标坐标点,表示fk到fk+1的向量;
16、e'k+1坐标(xe',k+1,ye',k+1,ze',k+1)为:
17、
18、其中,(xf,k,yf,k,zf,k)为k时刻虚假目标坐标点;ze,k为k时刻无人机飞行高度。
19、进一步的,步骤s2中构造的虚假航迹生成数量指标为:
20、
21、其中,j1表示虚假航迹生成数量指标,gn表示第n架无人机生成的虚假航迹数量;s表示无人机集群中的无人机数量。
22、进一步的,步骤s3中构造的无人机集群飞行总距离指标为:
23、
24、其中,j2表示无人机集群飞行总距离指标,s表示无人机集群中的无人机数量;k表示欺骗总时刻数;和分别表示虚假目标的平均飞行高度和平均飞行距离;hmin,e表示无人机飞行高度下限;表示第n架无人机在第k时间段的飞行距离。
25、进一步的,步骤s4中建立的针对组网雷达的无人机集群航迹欺骗双目标优化模型为:
26、
27、其中,μ表示无人机集群欺骗策略;θ表示无人机速度方向与虚假目标速度方向夹角;z0表示无人机初始高度;γ表示虚假航迹旋转角度;ω1和ω2分别表示优化目标j1和j2的权重系数;s表示无人机集群中的无人机数量,gn表示第n架无人机生成的虚假航迹数量,k表示欺骗总时刻数;和分别表示虚假目标的平均飞行高度和平均飞行距离;hmin,e表示无人机飞行高度下限;表示第n架无人机在第k时间段的飞行距离;vmax,e和vmin,e分别表示无人机飞行速度上下限;表示无人机en在第k时间段的飞行速度;△αmax,e和△αmin,e分别表示无人机飞行转弯角上下限;表示无人机en在第k时间段的转弯角;βmax,e和βmin,e分别表示无人机飞行俯仰角上下限;表示无人机en在第k时间段的飞行俯仰角;hmax,e和hmin,e分别表示无人机飞行高度上下限;表示无人机en在第k时间段的飞行高度;表示无人机en1和无人机en2的间距;dsafe表示无人机间距的安全距离;γmax和γmin分别表示虚假航迹旋转角度上下限;nr表示虚假航迹需要通过同源检验的雷达数量;r表示组网雷达系统中的雷达数量;hm,r为布尔变量,表示同源检验参数,若虚假航迹m的航迹点与任意一部雷达r的连线上有无人机,记hm,r=1,反之hm,r=0;μn,m,r为布尔变量,为无人机集群欺骗策略μ中的元素,若第n架无人机欺骗第r部雷达产生虚假航迹m,记μn,m,r=1,反之μn,m,r=0。
28、进一步的,虚假航迹旋转角度γ对虚假航迹的影响表示为:
29、
30、其中,(x'f,k,y'f,k,z'f,k)表示旋转原有虚假航迹后产生的新虚假航迹,(xf,k,yf,k,zf,k)为k时刻虚假目标坐标点;(xf,mid,yf,mid,zf,mid)表示虚假航迹在中间时刻的位置坐标。
31、进一步的,步骤s5中虚假航迹生成数量优化模型表示为:
32、
33、其中,μ表示无人机集群欺骗策略,s表示无人机集群中的无人机数量,gn表示第n架无人机生成的虚假航迹数量,nr表示表示虚假航迹需要通过同源检验的雷达数量;r表示组网雷达系统中的雷达数量;hm,r为布尔变量,表示同源检验参数;μn,m,r为布尔变量,为无人机集群欺骗策略μ中的元素;
34、采用平台复用的无人机集群欺骗策略对虚假航迹生成数量优化模型进行求解:
35、i)基于比例因子由虚假航迹生成虚假航迹
36、
37、其中,k时刻虚假目标m2对应虚假目标m1的比例因子表示为:
38、
39、其中,和分别表示k时刻虚假目标m1和虚假目标m2到雷达的距离;表示不随时刻变化的常数比例因子,给出了虚假目标m2的基础活动范围;表示k时刻的波动比例因子,使得虚假航迹m2形状不同于虚假航迹m1;
40、ii)给定虚假航迹数量,采用平台复用的无人机集群欺骗策略由无人机产生对应虚假目标:无人机集群欺骗策略根据下标1获得;
41、表1无人机集群欺骗策略表
42、
43、iii)给定无人机数量,采用平台复用的无人机集群欺骗策略由无人机产生对应虚假目标;具体为:
44、由s架无人机构成的无人机集群,将其分为q个无人机群组,s≥nr,其中q需满足下式:
45、q=s-l(nr-1).
46、为使生成的虚假航迹总数l最大,需令q最小且q≥1,由下式得到生成的虚假航迹总数最大值lmax:
47、
48、其中,表示向下取整,将l的最大值lmax代入q的计算公式,得到无人机群组最小值qmin;
49、然后对第i个无人机群组产生的虚假航迹数量li进行分配,需使其满足下式:
50、
51、第i个无人机群组的无人机数量si由下式计算:
52、si=nr+(li-1)(nr-1).
53、最后,由表1得到第i个无人机群组的欺骗策略。
54、进一步的,无人机集群飞行总距离优化模型表示为:
55、
56、其中,θ表示无人机速度方向与虚假目标速度方向夹角;z0表示无人机初始高度;γ表示虚假航迹旋转角度;s表示无人机集群中的无人机数量;k表示欺骗总时刻数;表示第n架无人机在第k时间段的飞行距离;vmax,e和vmin,e分别表示无人机飞行速度上下限;表示无人机en在第k时间段的飞行速度;△αmax,e和△αmin,e分别表示无人机飞行转弯角上下限;表示无人机en在第k时间段的飞行转弯角;βmax,e和βmin,e分别表示无人机飞行俯仰角上下限;表示无人机en在第k时间段的飞行俯仰角;hmax,e和hmin,e分别表示无人机飞行高度上下限;表示无人机en在第k时间段的飞行高度;表示无人机en1和无人机en2的间距;dsafe表示无人机间距的安全距离;γmax和γmin分别表示虚假航迹旋转角度上下限;
57、采用粒子群pso算法对无人机集群飞行总距离优化模型进行求解:
58、i)初始化:初始化一群粒子的位置和速度,第0代第i个粒子的位置速度其中,中的任意向量表示由无人机en初始高度和每时刻速度夹角构成的向量;表示虚假航迹旋转角度向量,为对应的粒子速度值;通过优化目标评估每个粒子的适应度值;
59、ii)迭代更新:寻找每个粒子第t代的个体位置最优值和群体位置最优值根据下式对粒子速度进行更新:
60、
61、其中,表示第(t+1)代粒子i在第d维度上的运动速度;ω表示惯量因子;表示第t代粒子i在第d维度上的运动速度;c1和c2表示加速因子;r1和r2为(0,1)之间的随机数;表示第t代粒子i在第d维度上的个体位置最优值;表示第t代粒子i在第d维度上的位置;表示第t代群体位置在第d维度上的最优值;
62、根据下式对粒子位置进行更新:
63、
64、其中,和分别表示第(t+1)代和第t代粒子i在第d维度上的位置;表示第(t+1)代粒子i在第d维度上的运动速度;
65、iii)检验终止条件:检验是否达到最大迭代次数或两次迭代间适应度值之差小于终止指标ε:如果满足,则算法终止;否则,返回步骤ii),执行下一次迭代;
66、iv)输出:(x1,x2,…,xs),其中表示由无人机en初始高度和每时刻速度夹角构成的向量;虚假航迹旋转角度向量x(s+1)。
67、基于相同的发明构思,本发明还提供了一种面向航迹欺骗的无人机集群欺骗策略与航迹联合优化系统,包括:
68、单无人机航迹欺骗模型建立单元,用于建立单无人机航迹欺骗模型;
69、虚假航迹生成数量指标构建单元,用于构造以无人机集群欺骗策略和无人群航迹为优化变量的虚假航迹生成数量指标;
70、无人机集群飞行总距离指标构建单元,用于构造以虚假航迹旋转角度和无人机集群航迹为优化变量的无人机集群飞行总距离指标;
71、优化模型建立单元,用于以最大化虚假航迹生成数量和最小化无人机集群飞行总距离为优化目标,以无人机飞行动力学性能为约束条件,建立针对组网雷达的无人机集群航迹欺骗双目标优化模型;
72、优化模型求解单元,用于结合平台复用的无人机集群欺骗策略和pso算法对优化模型建立单元中建立的针对组网雷达的无人机集群航迹欺骗双目标优化模型进行求解;包括:首先将优化模型分解为虚假航迹生成数量优化模型以及无人机集群飞行总距离优化模型;结合平台复用的无人机集群欺骗策略对虚假航迹生成数量优化模型进行求解;结合pso算法对无人机集群飞行总距离优化模型进行求解;最终输出优化结果。
73、有益效果:与现有技术相比,本发明的显著优点为:(1)通过构建虚假航迹生成数量指标和无人机集群飞行总距离指标,以最大化虚假航迹生成数量和最小化无人机集群飞行总距离为优化目标,以无人机飞行动力学性能为约束条件,建立针对组网雷达的无人机集群航迹欺骗双目标优化模型,对无人机集群欺骗策略、无人机集群航迹、虚假航迹旋转角度进行优化,以达到使低速无人机集群产生尽可能多的高速虚假航迹的目的;(2)实现了较优的无人机集群欺骗策略选择、无人机集群航迹规划、虚假航迹旋转角度选择,使低速无人机产生尽可能多的高速虚假航迹,从而高效实现对组网雷达的航迹欺骗。
本文地址:https://www.jishuxx.com/zhuanli/20241204/341817.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。