轮式机器人运动规划方法、装置、电子设备及介质与流程
- 国知局
- 2024-12-06 12:23:04
本发明涉及机器人路径规划,尤其涉及一种轮式机器人运动规划方法、装置、电子设备及介质。
背景技术:
1、随着工业智能化水平的不断提升,语音识别、机器视觉、机器学习、自动导航与定位等多种智能技术的落地,机器人产业规模快速增长,凭借其交互性较强、环境适应性较强、应用领域范围广等优点,成为经济发展、人民生活、社会治理的重要组成,广泛应用于移动测量、军事侦察和灾害救援等领域中,市场规模接近千亿,为生产与生活带来了巨大变革。
2、自主导航系统是智能机器人独立执行各项任务的前提,其中基于环境感知模块与定位定姿模块的运动规划系统是自主导航系统的核心之一,目的是在可行驶区域中规划出一条能够躲避障碍物的运动轨迹,具体分为路径规划与轨迹优化两个阶段,其中路径规划是在有障碍物的工作环境中找到安全可行的最短无碰撞几何路径,然而,现有路径规划模块大多存在可用性、安全性与规划效率之间的矛盾。
3、仓储、园区、商场等有先验地图的已知环境下智能机器人路径规划常采用设置巡检点、地图匹配等方式,这些路径规划方法往往根据各场景个性化定制,大多数系统只能在单一场景下使用,需要不断更新与维护。然而在移动测量、军事侦察等应用领域中,存在大量无先验地图或巡检点的复杂未知场景,与此同时此类场景包含大量动态物体,具有时变性强的特点,因此,针对特定环境的机器人规划系统难以实现可用的运动规划。
4、现有技术中针对复杂未知场景,目前路径规划阶段常采用d*系列算法,其基于反向增量思想,从目标点开始向起点进行反向搜索,当环境中出现动态障碍物或者路径发生偏离时,该算法能够动态地更新路径,适应复杂环境的能力较强,但该算法在搜索过程中,由于逐层搜索拓展节点,大量无关节点被拓展,导致搜索效率较低,难以同时满足安全性与实时性。
5、综上所述,复杂未知环境下存在动态物体难以预测、无先验可行驶区域等情况,导致目前路径规划模块存在规划时间过长、动态障碍物识别难等问题。因此,现有技术中缺乏一种运动规划方法来规划轮式机器人的路径,从而提高路径规划的效率。
技术实现思路
1、有鉴于此,有必要提供一种轮式机器人运动规划方法、装置、电子设备及介质,用以解决现有技术中轮式机器人的路径规划计算效率低的问题。
2、为了解决上述问题,本发明提供一种轮式机器人运动规划方法,包括:
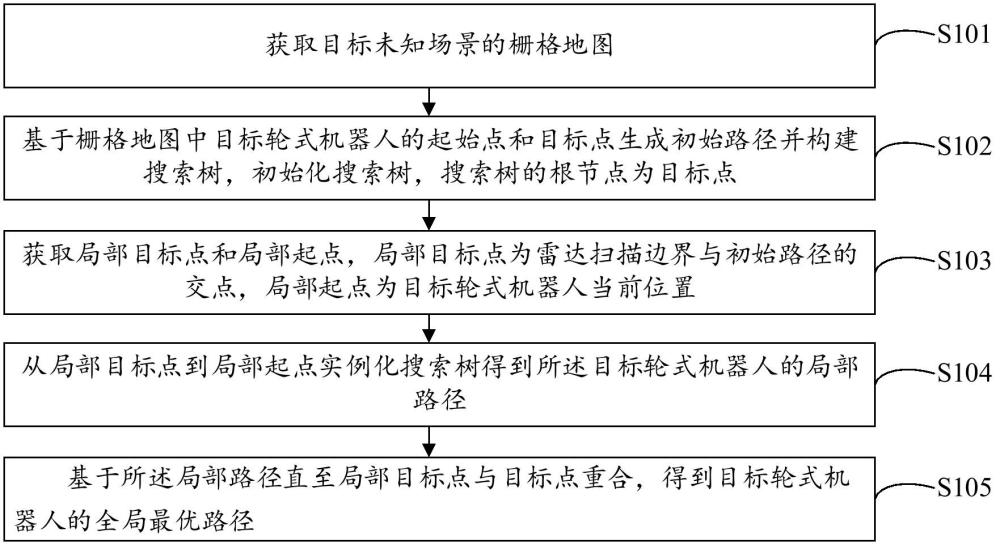
3、获取目标未知场景的栅格地图;
4、基于栅格地图中目标轮式机器人的起始点和目标点生成初始路径并构建搜索树,初始化搜索树,搜索树的根节点为目标点;
5、获取局部目标点和局部起点,局部目标点为雷达扫描边界与初始路径的交点,局部起点为目标轮式机器人当前位置;
6、从局部目标点到局部起点实例化搜索树得到所述目标轮式机器人的局部路径;
7、基于所述局部路径直至局部目标点与目标点重合,得到目标轮式机器人的全局最优路径。
8、在一种可能的实现方式中,所述获取目标未知场景的栅格地图,包括:
9、利用目标轮式机器人上的雷达基于改进射线法获取目标未知场景的栅格地图。
10、在一种可能的实现方式中,所述利用目标轮式机器人上的雷达基于改进射线法获取目标未知场景的栅格地图,包括:
11、获取目标未知场景的点云数据;
12、基于改进射线法获取所述点云数据的障碍物点和地面点;
13、将所述障碍物点和所述地面点进行特征点配准,得到边缘点和平面点;
14、基于所述边缘点和所述平面点得到所述目标轮式机器人的初始定位信息;
15、对初始定位信息进行优化,得到目标轮式机器人的位姿;
16、基于目标轮式机器人的位姿得到目标未知场景的栅格地图。
17、在一种可能的实现方式中,所述基于栅格地图中目标轮式机器人的起始点和目标点生成初始路径并构建搜索树,初始化搜索树,包括:
18、基于栅格地图中目标轮式机器人的起始点和目标点生成初始路径;
19、在栅格地图中根据目标轮式机器人的起始点和目标点构建搜索树,并对搜索树的树边队列和节点队列进行初始化。
20、在一种可能的实现方式中,所述从局部目标点到局部起点实例化搜索树得到所述目标轮式机器人的局部路径,包括:
21、采用随机采样的方式对局部目标点到所述局部起点之间的目标范围进行采样,并根据树节点队列的最小代价值来确定与采样点连接的点以形成当前最优边,所述最优边为目标轮式机器人的局部路径。
22、在一种可能的实现方式中,所述采用随机采样的方式对局部目标点到所述局部起点之间的目标范围进行采样,并根据树节点队列的最小代价值来确定与采样点连接的点以形成当前最优边,包括以下步骤:
23、步骤一:对局部目标点到所述局部起点之间的目标范围进行采样将采样点加入到采样点集合中,将节点集合加入到树节点队列中;
24、步骤二:判断树边队列与树节点队列是否为空,若是则执行步骤三,若否则执行步骤五;
25、步骤三:判断是否生成可行路径,若是则执行步骤四;
26、步骤四:当生成可行路径时,基于生成路径到达起点所需代价更新椭圆采样区域,获取采样点并更新采样点集合、修剪搜索树节点与搜索树边;
27、步骤五:估计树节点和树边最小代价值,并判断树节点最小代价值是否小于等于树边最小代价值,若是则执行步骤六;
28、步骤六:确定树节点队列中估计代价最小的顶点,并获取搜索半径内满足约束条件的所有采样点,并将边加入到树边队列中;
29、步骤七:确定树边队列中估计代价值最小的边后,并从树边队列中删去;
30、步骤八:判断此边的估计代价值是否大于等于当前路径代价值,若是则执行步骤九,若否则执行步骤十;
31、步骤九:清空树边队列与树节点队列;
32、步骤十:判断路径通过边后的代价值是否降低,若是则执行步骤十一;
33、步骤十一:判断边对应的节点是否在搜索树的树节点队列中,若是则执行步骤十二,若否则执行步骤十三;
34、步骤十二:对搜索树重新布线;
35、步骤十三:拓展搜索树的树边;
36、步骤十四:不断重复步骤二到步骤十三,直至从搜索树连接到目标轮式机器人的局部起点。
37、在一种可能的实现方式中,还包括:采用曲线拟合的方式对所述全局最优路径进行处理,得到目标轮式机器人的运动轨迹。
38、另一方面,本发明还提供了一种轮式机器人运动规划装置,包括:
39、栅格地图获取模块,用于获取目标未知场景的栅格地图;
40、初始化模块,用于基于栅格地图中目标轮式机器人的起始点和目标点生成初始路径并构建搜索树,初始化搜索树,搜索树的根节点为目标点;
41、局部目标点和局部起点获取模块,用于获取局部目标点和局部起点,局部目标点为雷达扫描边界与初始路径的交点,局部起点为目标轮式机器人当前位置;
42、局部路径获取模块,从局部目标点到局部起点实例化搜索树得到所述目标轮式机器人的局部路径;
43、全局最优路径获取模块,用于基于所述局部路径直至局部目标点与目标点重合,得到目标轮式机器人的全局最优路径。
44、另一方面,本发明还提供了一种电子设备,包括存储器和处理器,其中,
45、所述存储器,用于存储程序;
46、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述任意一种实现方式中所述的一种轮式机器人运动规划方法中的步骤。
47、另一方面,本发明还提供了一种计算机可读存储介质,用于存储计算机可读取的程序或指令,所述程序或指令被处理器执行时能够实现上述任意一种实现方式中所述的一种轮式机器人运动规划方法中的步骤。
48、本发明的有益效果是:本发明提供的一种轮式机器人运动规划方法,首先获取目标未知场景的栅格地图,然后基于栅格地图中目标轮式机器人的起始点和目标点生成初始路径并构建搜索树,初始化搜索树,搜索树的根节点为目标点,进一步获取局部目标点和局部起点,局部目标点为雷达扫描边界与初始路径的交点,局部起点为目标轮式机器人当前位置,进一步从局部目标点到局部起点实例化搜索树得到所述目标轮式机器人的局部路径,最后基于所述局部路径直至局部目标点与总目标点重合,得到目标轮式机器人的全局最优路径。采用反向bit*算法从目标点开始反向生成搜索树,与基本bit*算法相比,当出现动态障碍物时,基本bit*算法需要重新规划整条路径,以适应动态物体位置的变化,并且可能需要进行频繁的调整以绕过障碍物,导致路径规划算法的实时性降低,但是本发明中使用的反向bit*算法从目标点开始反向生成搜索树,当动态障碍物出现时,以动态障碍物为局部目标点,仅需要重新计算动态障碍物附近的路径,能够更快地适应动态障碍物位置的变化,避免重新计算整个路径,提高了路径规划的计算效率。
本文地址:https://www.jishuxx.com/zhuanli/20241204/341053.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表