机器人的控制方法和机器人与流程
- 国知局
- 2024-12-06 12:32:53
本申请涉及机器人,例如涉及一种机器人的控制方法和机器人。
背景技术:
1、光伏面板,也称太阳能电池板,是一种利用光电效应将太阳能转化为电能的装置。但是长期的户外暴露使得光伏面板容易受到环境、天气等因素的影响,导致光伏面板表面产生各种故障或出现尘埃、污垢积累。光伏面板表面的尘埃、污垢积累或故障,会降低光伏系统的发电效率。因此,定期清洁和监测光伏面板对于保持其高效运行至关重要。对于一些技术人员难以到达的光伏面板架设区域,多采用机器人化方式进行光伏面板清洁和故障检测,以保障光伏面板的高效运行并降低人员投入。
2、为提升机器人运行的自主性,需要对机器人运行轨迹进行规划,如按照预设的“几”字形路线行走,以确保机器人能够全面检测光伏面板或对光伏面板进行清洁。相关技术中,通过在机器人端部安装超声波传感器,当机器人行进至拐点处,控制传感器探头伸出并左右旋转进行环境探测,以借助光伏面板的沟槽等特征,识别机器人与光伏面板的位置关系。而后控制机器人转动,测算机器人的角度偏移量,进行行进角度纠偏,以确保机器人能够按照预设路径行进。
3、在实现上述实施例的过程中,发现相关技术虽然能够通过超声波传感器,实现机器人的运动路径纠偏。但是整个路径纠偏过程需要结合传感器探头和机器人机身的多次运动,才可以计算出机器人的角度偏移量,降低了机器人的行进效率的同时,路径行进纠正精度低。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、本公开实施例提供了一种机器人的控制方法和机器人,能够确保机器人的行进效率的同时,提升路径行进纠正精度。
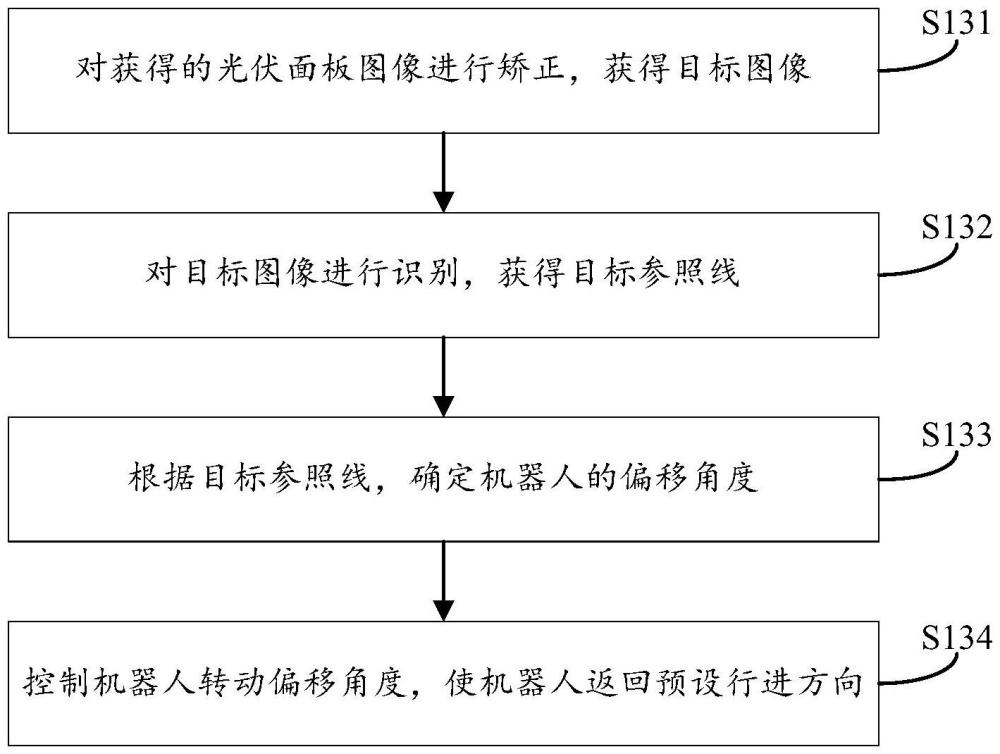
3、在一些实施例中,提供了一种机器人的控制方法,所述机器人用于光伏面板,控制方法包括:对获得的光伏面板图像进行矫正,获得目标图像;光伏面板图像为机器人当前行进方向上的光伏面板的图像;对目标图像进行识别,获得目标参照线;根据目标参照线,确定机器人的偏移角度;控制机器人转动偏移角度,使机器人返回预设行进方向。
4、可选地,对获得的光伏面板图像进行矫正,获得目标图像,包括:对光伏面板图像进行切片,获得有效区域图像;对有效区域图像进行透视变换,获得目标图像。
5、可选地,机器人包括用于采集光伏面板图像的摄像头;对光伏面板图像进行切片,获得有效区域图像,包括:获得摄像头到光伏面板的最佳视距;根据最佳视距,确定光伏面板图像的有效区域;对光伏面板图像进行切片,提取有效区域,获得有效区域图像。
6、可选地,根据最佳视距,确定光伏面板图像的有效区域,包括:沿光伏面板图像的长度方向,根据最佳视距确定有效区域的起始位置;沿光伏面板图像的长度方向,根据最佳视距确定有效区域的结束位置;将位于起始位置和结束位置之间的区域作为有效区域。
7、可选地,对目标图像进行识别,获得目标参照线,包括:对目标图像进行识别,获得多个检测点;对多个检测点进行筛选,获得目标检测点;对目标检测点进行直线拟合,获得目标参照线。
8、可选地,对目标图像进行识别,获得多个检测点,包括:计算预设模板与目标图像中各区域的相似度;将相似度大于相似度阈值的区域作为目标区域;输出目标区域的像素位置,获得多个检测点。
9、可选地,对多个检测点进行筛选,获得目标检测点,包括:从多个检测点中确定第一检测点;计算非第一检测点到第一检测点的距离;非第一检测点为多个检测点中除第一检测点之外的其他检测点;将距离第一检测点最近的两个非第一检测点和第一检测点作为目标检测点。
10、可选地,根据目标参照线,确定机器人的偏移角度,包括:根据目标参照线,确定行进参照线;计算目标参照线和行进参照线之间的夹角,获得机器人的偏移角度。
11、可选地,机器人包括安装支架、吸附装置和转动装置,吸附装置和转动装置间隔设置于安装支架靠近光伏面板的一侧,吸附装置和转动装置远离安装支架的一端均能够在固定于光伏面板表面的固定状态和脱离于光伏面板表面的脱离状态之间切换;控制机器人转动偏移角度,包括:控制转动装置处于固定状态;控制吸附装置处于脱离状态;控制转动装置转动偏移角度,以驱动吸附装置和安装支架相对于光伏面板转动偏移角度。
12、在一些实施例中,提供了一种机器人,包括:机器人本体;控制器,安装于所述机器人本体,被配置为如上述实施例所述的机器人的控制方法
13、本公开实施例提供的机器人的控制方法和机器人,能够实现以下技术效果:
14、本公开实施例提供的机器人的控制方法,能够通过实时采集机器人当前行进方向上的光伏面板的图像(即光伏面板图像),再对矫正后的光伏面板图像(即目标图像),进行识别,获得目标参照线,确定出机器人当前行进方向相对于预设行进方向的偏移角度,进而控制机器人转动偏移角度,实现行进方向纠正。与相关技术相比,由于避免了控制传感器探头和机器人机身的多次运动进行环境探测的过程,提升了机器人的行进效率的同时,降低了其他环境因素的干扰,提升了行进方向的纠正精度。此外,本公开能够通过实时光伏面板图像进行实时行进方向纠正,相比于相关技术中的定点行进方向纠正,纠正效果更好。
15、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本申请。
技术特征:1.一种机器人的控制方法,所述机器人用于光伏面板,其特征在于,控制方法包括:
2.根据权利要求1所述的控制方法,其特征在于,对获得的光伏面板图像进行矫正,获得目标图像,包括:
3.根据权利要求2所述的控制方法,其特征在于,机器人包括用于采集光伏面板图像的摄像头;对光伏面板图像进行切片,获得有效区域图像,包括:
4.根据权利要求3所述的控制方法,其特征在于,根据最佳视距,确定光伏面板图像的有效区域,包括:
5.根据权利要求1至4任一项所述的控制方法,其特征在于,对目标图像进行识别,获得目标参照线,包括:
6.根据权利要求5所述的控制方法,其特征在于,对目标图像进行识别,获得多个检测点,包括:
7.根据权利要求5所述的控制方法,其特征在于,对多个检测点进行筛选,获得目标检测点,包括:
8.根据权利要求1至4任一项所述的控制方法,其特征在于,根据目标参照线,确定机器人的偏移角度,包括:
9.根据权利要求1至4任一项所述的控制方法,其特征在于,机器人包括安装支架、吸附装置和转动装置,吸附装置和转动装置间隔设置于安装支架靠近光伏面板的一侧,吸附装置和转动装置远离安装支架的一端均能够在固定于光伏面板表面的固定状态和脱离于光伏面板表面的脱离状态之间切换;控制机器人转动偏移角度,包括:
10.一种机器人,其特征在于,包括:
技术总结本申请涉及机器人技术领域,公开一种机器人的控制方法和机器人。所述机器人用于光伏面板。控制方法包括:对获得的光伏面板图像进行矫正,获得目标图像;光伏面板图像为机器人当前行进方向上的光伏面板的图像;对目标图像进行识别,获得目标参照线;根据目标参照线,确定机器人的偏移角度;控制机器人转动偏移角度,使机器人返回预设行进方向。本申请,能够确保机器人的行进效率的同时,提升路径行进纠正精度。技术研发人员:王大千,王树龙,杜元帅,常勇,王路,仇宗华,张宗山,秦发涛,王天龙受保护的技术使用者:滨州魏桥国科高等技术研究院技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/342026.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种快速搭建调平平台
下一篇
返回列表