一种机器人快换盘锁紧检测机构的制作方法
- 国知局
- 2024-12-26 15:29:59
本技术涉及一种检测结构,特别涉及一种机器人快换盘锁紧检测机构,属于机器人快换盘。
背景技术:
1、机器人快换盘也被称为机器人快换装置、换枪盘、快换器、快换工具盘等,是工业机器人行业中应用在末端执行器上的一种柔性连接工,它的主要作用是实现机器人末端执行器的快速更换,以增加工业机器人的使用柔性,提高生产效率,并降低生产成本。机器人快换盘通常由机器人侧和工具侧两部分组成,机器人侧安装在机器人末端,而工具侧则与执行工具(如焊枪、机械手、夹具等)安装在一起,这两部分通过机械锁紧机构实现快速而稳固的连接,同时保证高精度定位。
2、机器人快换盘在使用过程中,通过机械锁紧机构连接机器人侧的主盘和工具侧的副盘,但现有的机器人快换盘大多未设置锁紧检测机构,因此在快换盘锁紧后,工作人员无法获取锁紧后的信号反馈,当快换盘出现气压不足或配件故障后,工作人员无法及时发现问题,导致快换盘使用过程中的安全性降低,为此,提出一种机器人快换盘锁紧检测机构。
技术实现思路
1、有鉴于此,本实用新型提供一种机器人快换盘锁紧检测机构,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
2、本实用新型实施例的技术方案是这样实现的:一种机器人快换盘锁紧检测机构,包括主盘组件,所述主盘组件包括主盘主体、接近传感器、通槽、磁性传感器、活塞和磁环;
3、所述主盘主体的内侧壁安装有接近传感器,所述主盘主体的一侧开设有通槽,所述通槽的内部安装有磁性传感器,所述主盘主体的内侧壁滑动连接有活塞,所述活塞的外侧壁固定连接有磁环;
4、所述主盘组件的一侧设置有副盘组件。
5、进一步优选的:所述主盘组件还包括导向护套和锁紧钢珠;
6、所述主盘主体的一侧固定连接有导向护套,所述导向护套的内侧壁均匀滑动连接有锁紧钢珠,所述活塞滑动连接于导向护套的内侧壁。
7、进一步优选的:所述主盘主体的一侧均匀开设有通气孔,所述通气孔的内侧壁滑动连接有止气钢珠。
8、进一步优选的:所述止气钢珠的外侧壁固定连接有弹簧,所述弹簧的一端固定连接有密封螺栓。
9、进一步优选的:所述活塞的外侧壁均匀开设有凹槽,所述活塞的外侧壁固定连接有导向环。
10、进一步优选的:所述活塞的外侧壁固定连接有密封圈。
11、进一步优选的:所述副盘组件包括副盘主体和滑槽;
12、所述副盘主体的内侧壁均匀开设有滑槽,所述副盘主体设置于主盘主体的一侧。
13、进一步优选的:所述主盘主体和副盘主体的外侧壁均安装有通讯接口,所述通讯接口与接近传感器和磁性传感器信号连接。
14、本实用新型实施例由于采用以上技术方案,其具有以下优点:
15、一、本实用新型通过接近传感器检测主盘主体与副盘主体之间的距离,保证主盘主体与副盘主体之间紧密连接,确认锁紧机构正常工作,提高机器人快换盘使用过程中的安全性。
16、二、本实用新型通过磁性传感器检测活塞磁环位置,确认活塞是否到位,防止内部活塞失效,当活塞出现故障后,能够快速向工作人员反馈问题,提醒人员对快换盘进行检修。
17、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
技术特征:1.一种机器人快换盘锁紧检测机构,包括主盘组件(10),其特征在于:所述主盘组件(10)包括主盘主体(11)、接近传感器(14)、通槽(15)、磁性传感器(16)、活塞(112)和磁环(116);
2.根据权利要求1所述的一种机器人快换盘锁紧检测机构,其特征在于:所述主盘组件(10)还包括导向护套(12)和锁紧钢珠(13);
3.根据权利要求2所述的一种机器人快换盘锁紧检测机构,其特征在于:所述主盘主体(11)的一侧均匀开设有通气孔(17),所述通气孔(17)的内侧壁滑动连接有止气钢珠(110)。
4.根据权利要求3所述的一种机器人快换盘锁紧检测机构,其特征在于:所述止气钢珠(110)的外侧壁固定连接有弹簧(19),所述弹簧(19)的一端固定连接有密封螺栓(18)。
5.根据权利要求2所述的一种机器人快换盘锁紧检测机构,其特征在于:所述活塞(112)的外侧壁均匀开设有凹槽(113),所述活塞(112)的外侧壁固定连接有导向环(114)。
6.根据权利要求5所述的一种机器人快换盘锁紧检测机构,其特征在于:所述活塞(112)的外侧壁固定连接有密封圈(115)。
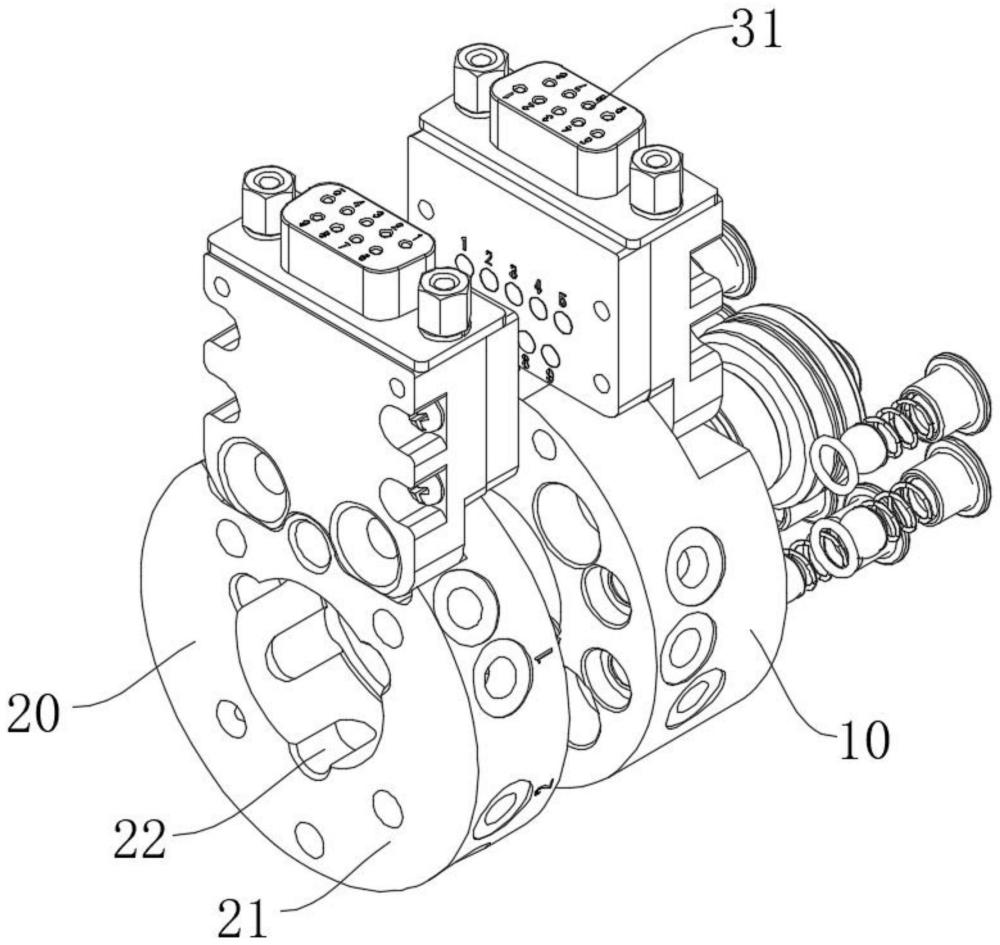
7.根据权利要求1所述的一种机器人快换盘锁紧检测机构,其特征在于:所述副盘组件(20)包括副盘主体(21)和滑槽(22);
8.根据权利要求7所述的一种机器人快换盘锁紧检测机构,其特征在于:所述主盘主体(11)和副盘主体(21)的外侧壁均安装有通讯接口(31),所述通讯接口(31)与接近传感器(14)和磁性传感器(16)信号连接。
技术总结本技术提供了一种机器人快换盘锁紧检测机构,包括主盘组件,所述主盘组件包括主盘主体、接近传感器、通槽、磁性传感器、活塞和磁环;所述主盘主体的内侧壁安装有接近传感器,所述主盘主体的一侧开设有通槽,所述通槽的内部安装有磁性传感器,所述主盘主体的内侧壁滑动连接有活塞;所述主盘组件的一侧设置有副盘组件。本技术通过接近传感器检测主盘主体与副盘主体之间的距离,保证主盘主体与副盘主体之间紧密连接,确认锁紧机构正常工作,提高机器人快换盘使用过程中的安全性。通过磁性传感器检测活塞磁环位置,确认活塞是否到位,防止活塞失效,当活塞出现故障后,能够快速向工作人员反馈问题,提醒人员对快换盘进行检修。技术研发人员:何学财受保护的技术使用者:苏州森伯特智能科技有限公司技术研发日:20240306技术公布日:2024/12/23本文地址:https://www.jishuxx.com/zhuanli/20241226/345942.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表