一种基于光纤配线机器人的光缆综合故障研判的装置及方法与流程
- 国知局
- 2025-01-10 13:21:40
本发明涉及光纤领域,更具体地,涉及一种基于光纤配线机器人的光缆综合故障研判的装置及方法。
背景技术:
1、力通信网以光纤通信为主,光纤通信在电力调度、自动化和继电保护等方面至关重要。当前,电力通信光缆网络规模大、环境复杂,易受自然和人为因素影响,光缆故障是影响电力通信业务的主要原因之一。因此,加强通信光缆的监控和运维对保障电力通信网和电网运行至关重要。近几年,电网建设和电力系统设备自动化程度不断提升,电力通信网发展迅速,管理运维已迈向智能化,主要通信设备已支持远程告警监视和网管操作。然而,电力光缆网运维仍依赖人工维护,缺少自动化运维技术支撑,成为运维效率的关键短板,例如光路开通抢修耗时长、人力多、效率低;光缆中断定位慢、灾害影响修复效率;纤芯检测耗时长、数据分析不便等问题。
2、现有技术中的智能光纤配线系统(智能odf)由主站系统和站端装置两部分组成。但站端光缆路由、纤芯资源、承载业务信息等数据管理,拔插、巡检测试均由人力完成。如何通过智能odf接收远程指令并自动完成不同端口之间的跳纤插拔、巡检、指定端口光路测试,是本领域亟待解决的技术问题。
技术实现思路
1、本发明旨在克服上述现有技术的至少一种缺陷(不足),提供一种基于光纤配线机器人的光缆综合故障研判的装置及方法,用于解决光缆网运维缺少自动化技术,导致光路开通抢修耗时长、人力多、效率低;光缆中断定位慢、灾害影响修复效率;纤芯检测耗时长、数据分析不便的技术问题。
2、本发明采取的技术方案是,提供一种基于光纤配线机器人的光缆综合故障研判的装置,包括:
3、机柜,包括进出线侧和维护侧;
4、配线板,设置于机柜中,将机柜内空间分隔成进出线侧和维护侧;
5、配线机器人,安装在维护侧内,包括支撑架,机械手和动作装置,所述动作装置用于控制机械手的平移和抓取,所述支撑架用于支撑机械手和动作装置的运动;
6、绕线装置,安装在进出线侧内,绕制有多条接驳光纤,所述接驳光纤一端为接驳端子,另一端为连接端;
7、多条光纤接驳线,设置在维护侧内,每条光纤接驳线的两端分别为第一端子和第二端子,之间通过具有一定长度的光纤线连接;
8、所述配线板上设有矩阵排列的光纤口,所述光纤口从配线板的进出线侧延伸至维护侧,其他设备的光纤线从进出线侧进入机柜,与所述接驳光纤焊接后再通过接驳端子连接至配线板进出线侧的光纤口,连接接驳端子的光纤口的维护侧连接光纤接驳线,实现两个其它设备之间的连接,这部分光纤接驳线为使用光纤接驳线,其他光纤接驳线第一端子和第二端子分别插接于进出线侧未连接接驳端子的光纤口上,这部分光纤接驳线为备用光纤接驳线,所述机器人通过切换不同的使用光纤接驳线和备用光纤接驳线,实现对其它设备之间的连接故障进行研判和恢复;
9、其中,所述配线板为第一坐标系,每个光纤口具有独立的坐标,所述支撑架为第二坐标系,所述机械手根据其在第二坐标系中的位置及第二坐标系相对于第一坐标系的相对位置,识别每个光纤口的坐标,实现对光纤口的定位;
10、所述机械手通过插拔使用光纤接驳线和备用光纤接驳线的第一端子或第二端子,实现使用光纤接驳线和备用光纤接驳线的切换;
11、所述光纤口具有固定的编号,所述编号由上而下、由左到右逐渐增大,所述机械手根据光纤口的编号,判断插拔光纤接驳线的第一端子或第二端子的先后顺序;
12、所述配线机器人还包括测试装置,所述测试装置用于从维护侧测试与进出线侧连接的其他设备的光路是否存在故障,包括有测试仪和与测试仪连接的第一测试端子,所述第一测试端子设置于机械手上。
13、有利于通过配线板作为第一坐标系,支撑架作为第二坐标系,使得机械手插拔光纤接驳线时可以对照坐标系精确调整位置,以提高机械手的操作稳定性;通过测试装置辅助判断光纤配线故障位置,降低故障检测对使用过程中的光纤的影响;通过第一测试端子设置于机械手上使得测试过程中的光纤接驳线是与机柜断开连接的,从而保证测试的准确性。
14、进一步的,还包括与测试仪连接的第二测试端子,所述第二测试端子从维护侧延伸至进出线侧,与进出线侧的一个光纤口连接,该光纤口所对应的维护侧的光纤口为测试端口。
15、有利于通过第二测试端子与光纤口的连接,使得连接的设备之间形成中间点,便于根据第一测试端子和第二测试端子的状态分别判断连接的两个设备是否故障。
16、进一步的,所述配线板上的光纤口分成上层区域和下层区域,所述备用光纤接驳线插接在上层区域的维护侧,所述接驳端子和使用光纤接驳线分别插接在下层区域的进出线侧和维护侧;
17、所述下层区域分成占用区和回收区,所述占用区的光纤口数量多于回收区,回收区和占用区呈左右分布,所述接驳端子和使用光纤接驳线分别插接在使用区的进出线侧和维护侧;
18、所述阵列排列的光纤口在左右方向上毗邻设置成行,在上下方向上分隔设置,在行与行之间形成容纳所述机械手通过的行走空间;
19、在维护侧,所述配线板左侧设置收纳区,右侧设置使用区,所述备用光纤接驳线的光纤线向左延伸收纳于收纳区内,所述使用光纤接驳线的光纤线向右延伸收纳于使用区内。
20、有利于通过上层区域和下层区域将光纤线束有效分隔,防止线束缠绕造成机械手抓取失误,影响自动插拔光纤线的准确性。
21、进一步的,机械手包括夹持第一端子或第二端子的夹持部,位于夹持部后方、能够容纳光纤线在其内穿行的穿行部,所述夹持部可以打开使光纤线进入穿行部,关闭使光纤线被限制于穿行部内;所述动作装置还包括控制机械手前进和后退的伸缩机构,所述伸缩机构控制机械手相对配线板前进和后退具有多级伸缩自由度,所述多级伸缩自由度至少包括远离配线板、保证机械手及其所夹持的光纤接驳线在平移时不会干涉其他部件的第一位置,靠近插接在光纤口中的第一端子或第二端子的后端、使光纤线能够进入穿行部的第二位置,以及,靠近插接在光纤口中的第一端子或第二端子的后端、使夹持部能够夹持第一端子或第二端子的第三位置;
22、所述动作装置还包括控制机械手转动的旋转机构,所述机械手在带动光纤线平移时,保持所述穿行部为左右贯通的通孔;在释放光纤线的过程中,旋转机构带动机械手转动至穿行部为上下贯通的通孔。
23、有利于通过多级伸缩自由度实现机械手在x轴、y轴、z轴的高精度灵活定位,避免在移动过程中碰撞配线板;通过第一位置限制机械手在平行于配线板的平面上具有自由度,第二位置限制机械手夹持光纤线后带其一起移动时的自由度,第三位置限制机械手夹持第一端子或第二端子的自由度,使得机械手在与光纤线、第一端子、第二端子充分接触且不与配线板上其他部件发生碰撞;有利于通过夹持部完成光纤线的抓取动作,通过穿行部完成带动光纤线的移动动作,通过旋转机构完成光纤线的释放及收纳动作。
24、进一步的,所述收纳区包括由若干竖向隔板分隔成的多个左右排列的竖直区域,每条备用光纤接驳线的第一端子和第二端子与左右相邻的两个光纤口连接,所有备用光纤接驳线占用若干行光纤口,收纳区的每个竖直区域用于收纳连接在连续多行光纤口上的备用光纤接驳线的光纤线,靠近配线板的竖直区域所收纳的光纤线所对应的备用光纤接驳线连接的光纤口行低于远离配线板的竖直区域所收纳的光纤线所对应的备用光纤接驳线连接的光纤口行;
25、每个竖直区域的右侧隔板上部设有向上的钩扣,每个钩扣对应一行光纤口;
26、每个竖直区域的右侧隔板中部设有凹口,左侧隔板对应凹口的位置设有从左侧隔板向右侧隔板颜色的挡板,所述挡板与凹口之间留有间隙,用于允许光纤线移出收纳区;
27、所述使用区与配线板之间还设有整理区,使用区上方还设有分束区;
28、所述整理区包括竖直平行分布的第一基板和第二基板,第一基板和第二基板包括多个向下的钩扣,每一个钩扣与光纤口的行对应,第一基板和第二基板之间设有弹性封堵,所述第一基板和第二基板在竖直方向上相互错开,使得所述弹性封堵能够完全封堵第一基板相邻两个钩扣之间的间隙且不能够完全封堵第二基板相邻两个钩扣之间的间隙;
29、所述分束区包括多个上下排列不同高度的承托件,每一承托件对应收纳连续多行光纤口的光纤线;
30、所述整理区包括前后两层限制层,每层限制层包括多个上下间隔分布的弹性悬臂杆。
31、有利于通过左右排列的竖直区域将收纳区分隔为多个,使得光纤线的收纳更为整洁高效;通过光纤口行的高低使得机械手从配线板左侧的收纳区移出光纤线时,后一次的移动轨迹能少于前一次的移动轨迹;通过凹口和钩扣对应加强光纤线在竖直方向和水平方向的整理高效性;通过第一基板和第二基板将每一条光纤线先后限制在整理区的两个基板中,以防止多条光纤线与多个端子之间发生缠绕,使得机械手在抓取端子时出现失误;通过弹性封堵的回弹性使其在受到机械手的挤压时形成间隙,从而容纳光纤线的拦截;通过两层限制层和弹性悬臂杆将每条进入整理区的光纤线实现横向排列的分流效果;通过分束区实现光纤线的纵向排列分流效果;通过穿行部中光纤线的收纳步骤,使得跳纤过程中的光纤线被依次、有序、可重复的整理,提高了远程操作跳纤动作的便捷性。
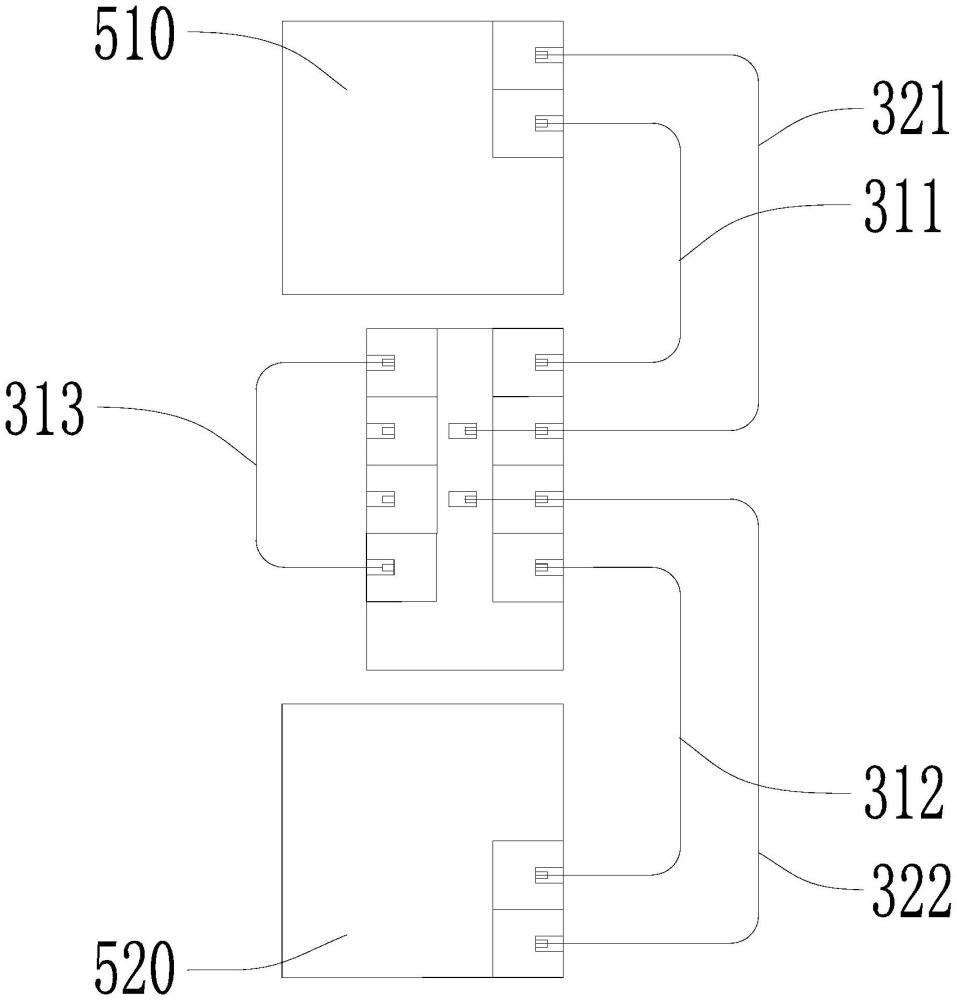
32、还提供一种适用于如所述装置的光缆综合故障研判的方法,其中,所述其他设备包括多组两个通过配线板和使用光纤接驳线连接的第一设备和第二设备,所述第一设备和第二设备包括一条使用光纤和至少一条备用光纤,所述使用光纤和备用光纤均与进出线侧的光纤口连接,使用光纤连接所对应的光纤口的维护侧通过使用光纤接驳线连接,备用光纤连接所对应的光纤口的维护侧未连接;当第一设备和第二设备之间断连时,所述机器人通过以下方法判断故障:
33、t1控制机械手拔下使用光纤接驳线与第一设备连接的第一端子,插入第一测试端子,启动测试仪进行测试,控制机械手恢复连接;
34、t2控制机械手拔下使用光纤接驳线与第二设备连接的第二端子,插入第一测试端子,启动测试仪进行测试,控制机械手恢复连接;
35、通过以下测试结果组合研判故障:
36、当t1连通,t2连通时,使用光纤接驳线断路;
37、当t1不连通,t2连通时,第一设备使用光纤断路;
38、当t1连通,t2不连通时,第二设备使用光纤断路;
39、当t1不连通,t2不连通时,第一和第二设备使用光纤断路;
40、对应上述研判结果,所述机器人通过以下方法恢复第一设备和第二设备之间的连接:
41、r1当使用光纤接驳线断路时,使用备用光纤接驳线替换使用光纤接驳线;
42、r2当第一设备使用光纤断路时,将使用光纤接驳线的第一端子连接至第一设备的备用光纤上;
43、r3当第二设备使用光纤断路时,将使用光纤接驳线的第二端子连接至第二设备的备用光纤上;
44、r4当第一和第二设备使用光纤断路时,使用备用光纤接驳线替换使用光纤接驳线,将备用光纤接驳线的第一端子连接至第一设备的备用光纤上,将备用光纤接驳线的第二端子连接至第二设备的备用光纤上。
45、有利于通过t1和t2中分别将光纤接驳线与第一设备、第二设备断开并判断第一设备和第二设备上的使用光纤、使用光纤接驳线是否出现连通故障,并通过机器人根据不同的故障实施对应的恢复方法,从而实现远程控制光纤配线网的自动研判故障及自动恢复的前一步。
46、进一步的,当t1测试为不通时,在控制机械手恢复连接前还包括以下步骤:
47、t3控制机械手将第一端子插入测试端口,启动测试仪进行测试,再控制机械手恢复连接;
48、当t2测试为不通时,在控制机械手恢复连接前还包括以下步骤:
49、t4控制机械手将第二端子插入测试端口,启动测试仪进行测试,再控制机械手恢复连接;
50、通过以下测试结果组合研判故障:
51、当t3连通时,第一设备使用光纤断路;
52、当t3不连通时,使用光纤接驳线或第二设备使用光纤断路;
53、当t4连通时,第二设备使用光纤断路;
54、当t4不连通时,使用光纤接驳线或第一设备使用光纤断路;
55、对应上述研判结果,所述机器人通过以下方法恢复第一设备和第二设备之间的连接:
56、r5当第一设备使用光纤断路时,将使用光纤接驳线的第一端子连接至第一设备的备用光纤上;
57、r6当使用光纤接驳线或第二设备使用光纤断路时,使用备用光纤接驳线替换使用光纤接驳线,将备用光纤接驳线的第一端子连接至第一设备的备用光纤上,将备用光纤接驳线的第二端子连接至第二设备的备用光纤上;
58、r7当第二设备使用光纤断路时,将使用光纤接驳线的第二端子连接至第二设备的备用光纤上;
59、r8当使用光纤接驳线或第一设备使用光纤断路时,使用备用光纤接驳线替换使用光纤接驳线,将备用光纤接驳线的第一端子连接至第一设备的备用光纤上,将备用光纤接驳线的第二端子连接至第二设备的备用光纤上。
60、有利于通过t3和t4中分别将测试端子与第一设备、第二设备连接并判断第一设备和第二设备上的使用光纤、使用光纤接驳线是否出现连通故障,并通过机器人根据不同的故障实施对应的恢复方法,从而实现远程控制光纤配线网的自动研判故障及自动恢复的后一步。
61、进一步的,所述方法r4、r6或r8的具体过程如下:
62、s0移除连接第一设备和第二设备的使用光纤接驳线,断开第一设备和第二设备,选择第一设备的一条备用光纤所连接的光纤口为第一光纤口,第二设备的一条备用光纤所连接的光纤口为第二光纤口,所述第一光纤口的编号小于第二光纤口;
63、s1选择一条备用光纤接驳线,将机械手平移至第一端子后方,从第一端子后方开始使光纤线被限制于穿行部内,由上而下平移机械手,将光纤线的一部分从收纳区中移出,释放光纤线;
64、s2将机械手平移至第一端子后方,夹持第一端子并将其从闲置的光纤口中拔出,机械手夹持第一端子平移至第一光纤口处,将第一端子插入第一光纤口,释放第一端子;
65、s3从第一端子后方开始使光纤线被限制于穿行部内,由下而上平移机械手至使用区,由上而下在使用区内平移机械手,将光纤线的一部分收纳于使用区中,释放光纤线;
66、s4将机械手平移至该备用光纤接驳线的第二端子后方,从第二端子后方开始使光纤线被限制于穿行部内,由上而下平移机械手,将光纤线的余下部分从收纳区中移出,释放光纤线;
67、s5将机械手平移至第二端子后方,夹持第二端子并将其从闲置的光纤口中拔出,机械手夹持第二端子平移至第二光纤口处,将第二端子插入第二光纤口,释放第一端子;
68、s6从第二端子后方开始使光纤线被限制于穿行部内,由下而上平移机械手至使用区,由上而下在使用区内平移机械手,将光纤线的全部收纳于使用区中,释放光纤线,至此,所选择的备用光纤变更为使用光纤,所使用的备用光纤接驳线变更为使用光纤接驳线;
69、s7测试第一设备和第二设备之间是否恢复连接,如果恢复则结束,如果没有恢复则重复上述步骤直至所有备用光纤用完为止。
70、有利于通过上述步骤将使用光纤接驳线替换为备用光纤接驳线。
71、进一步的,所述步骤s0中,移除连接第一设备和第二设备的使用光纤接驳线的过程中,具体步骤如下:
72、s01将机械手平移至第一端子后方,从第一端子后方开始使光纤线被限制于穿行部内,平移机械手,将光纤线的一部分从使用区中移出,释放光纤线;
73、s02将机械手平移至第一端子后方,夹持第一端子并将其从第一光纤口中拔出,机械手夹持第一端子平移至回收区的闲置的一个光纤口处,将第一端子插入该光纤口,释放第一端子;
74、s03从第一端子后方开始使光纤线被限制于穿行部内,平移机械手,将光纤线的一部分收纳于收纳区中,释放光纤线;
75、s04将机械手平移至第二端子后方,从第二端子后方开始使光纤线被限制于穿行部内,平移机械手,将光纤线的余下部分从使用区中移出,释放光纤线;
76、s05将机械手平移至第二端子后方,夹持第二端子并将其从第二光纤口中拔出,机械手夹持第二端子平移至回收区的闲置的另一个光纤口处,将第一端子插入该光纤口,释放第一端子;
77、s06从第二端子后方开始使光纤线被限制于穿行部内,平移机械手,将光纤线的全部收纳于收纳区中,释放光纤线。
78、有利于通过上述步骤将第一设备、第二设备的使用光纤接驳线的插拔具体分拆,以实现光纤配线机器人的自动插拔的效果。
79、进一步的,当所述第一设备或第二设备包括多条备用光纤时,所述方法r2、r3、r5、r7的具体过程是选择所连接的光纤口最靠近使用光纤连接的光纤口的备用光纤,将使用光纤接驳线连接至该备用光纤上,测试第一设备和第二设备是否恢复连接,如果恢复,则结束,如果未恢复,按与使用光纤连接的光纤口的距离由近至远逐一重复上述步骤,直至所有备用光纤用完为止。
80、有利于通过多条备用光纤的设置避免备用光纤也出现故障后导致光纤配线网无法恢复正常连通。
81、与现有技术相比,本发明的有益效果为:通过光纤配线机器人代替人力,实现远程操作光缆中断的恢复,快速、高效的完成光路抢修;避免人力去往危险、偏远灾害现场的同时能准确定位故障位置的技术效果。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352633.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。