一种心电图采集机器人
- 国知局
- 2025-01-10 13:36:56
本发明涉及心电图采集器械,具体涉及一种心电图采集机器人。
背景技术:
1、现阶段医院临床采集心电图的方法,通常使用心电图采集设备配合导联线和导联电极,借助人工将导联线与导联电极按照位置吸附在患者胸前。而在这过程中,导联电极的吸附较为费时,而且还需要找准准确的位置;另外心电图采集设备的导联电极与皮肤的吸附牢固度,受到皮肤干燥程度的限制,患者皮肤表面水分过多容易造成导联电极进水或脱落。因此本领域技术人员提出一种心电图采集机器人的方案进行解决。
技术实现思路
1、针对上述背景技术当中提出医院临床使用的心电图采集设备需要人工将导联线与导联电极吸附在患者胸前,较为费时;心电图采集设备的导联电极与皮肤的吸附牢固度受到皮肤干燥程度的限制,患者皮肤表面水分过多容易造成导联电极进水或脱落的缺陷,因而提供一种心电图采集机器人的技术方案内容;其包括机械操作臂机构,所述机械操作臂机构的末端端头设置有导联线电极夹爪,且机械操作臂机构的末端侧壁上固定有皮肤干燥机构,导联线电极夹爪的夹持端口中夹持有心电图导联线机构;
2、所述机械操作臂机构包括有轴向旋转基座,与轴向旋转基座顶端通过基座关节电机连接的大臂,以及通过肘关节电机连接在大臂末端上的小臂,且小臂的末端通过腕关节电机连接有u形执行臂,u形执行臂的前侧侧壁上固定连接有工业视觉摄像头;具体的,通过计算机控制轴向旋转基座进行度旋转,而大臂和小臂分别通过机器人关节电机进行驱动,借助u形执行臂侧壁上的工业视觉摄像头则能够将末端前侧的图像传递到计算机中,计算机根据支线具有不同的颜色,对应将电极端头标记为v1,v2,…,v9以及v3r、v4r、v5r;肢体导联ra、la、rl、ll分别对应于人体四肢。胸导的位置是v1导联位于胸骨右缘第4肋间,v2导联位于胸骨左缘第4肋间,v4导联为左侧的锁骨中线第5肋间。v3导联则位于v2和v4导联连线的中点处。
3、而v5导联位于左侧的腋前线,与v4导联在同一水平,v6导联位于左侧的腋中线,与v4导联在同一水平,v7导联位于左侧的腋后线,v8导联位于左侧的肩胛中线都与v4导联在同一水平,v9导联位于左侧脊柱旁线也与v4导联在同一水平,而v3r、v4r、v5r的位置在右胸分别与左胸的v3、v4、v5的位置是相镜像对称。
4、所述心电图导联线机构包括有主线,固定在主线后端的导联线插头,以及固定在主线前端的分线器,且分线器的前端连接有十八根支线,支线的末端上均连接有一片电极端头,电极端头的端头上均设置有一片ecg吸附电极;
5、所述导联线电极夹爪包括有两块呈左右镜像对称设置的外壳,固定在外壳顶部表面的伺服驱动电机,以及转动的连接在外壳内腔中的两枚蜗轮,且伺服驱动电机的输出轴贯穿到外壳之间的内部并固定有蜗杆,蜗杆与两个所述蜗轮相互啮合传动;其中,外壳的前后侧壁上活动设置有两根齿条,齿条的底端均固定有橡胶爪,且齿条均与水平面之间具有30-45°的夹角,齿条相互呈前后镜像对称设置;具体的,在抓取电极端头的过程中,伺服驱动电机控制蜗杆转动而驱动齿条沿着倾斜的方向相互靠近或相互远离,从而带动橡胶爪相互靠近或相互远离,在橡胶爪相互靠近的过程中将电极端头进行夹持,并依靠机械操作臂机构将电极端头移动到指定位置下压吸附之后橡胶爪松开对电极端头的夹持。
6、所述皮肤干燥机构包括有方向槽,固定在方向槽内腔中的3-5根电加热棒,以及固定在方向槽底部端口的风筒,且风筒的内腔中设置有伺服风机。具体的,在通过工业视觉摄像头观察到患者需要吸附区域的皮肤具有较多的汗水时,通过风筒内部的伺服风机向皮肤上吹风,迫使皮肤上的汗水快速干燥。而在冬季环境下,通过方向槽内部的电加热棒加热空气并及拿过加热后的空气吹向患者皮肤,起到迫使需要粘贴电极端头的皮肤表面得到干燥。
7、在上述一种心电图采集机器人的技术方案中,优选地,所述u形执行臂远离小臂的前端内部开设有缺口,用于供导联线电极夹爪放置固定在u形执行臂的内部中,且工业视觉摄像头的后端表面通过螺钉锁紧连接在u形执行臂的前侧表面上。
8、在上述一种心电图采集机器人的技术方案中,优选地,所述轴向旋转基座的底部表面四角通过螺栓锁紧连接在病床的旁边,且机械操作臂机构和工业视觉摄像头的数据传输端以及接入端均通过电缆与医用计算机终端连接。
9、在上述一种心电图采集机器人的技术方案中,优选地,所述导联线插头的插接端插入到心电图仪器的信号接收端口中,且支线共有十八根且依次标记为十八种不同颜色;其中,电极端头的外表面被橡胶爪相互靠近的一侧表面夹持。
10、在上述一种心电图采集机器人的技术方案中,优选地,所述外壳相互靠近的一侧表面四角通过四枚螺钉锁紧连接,外壳的前侧和后侧均开设有一道供蜗轮放置和滑动的斜槽,斜槽均与水平面之间具有30-45°的夹角,且斜槽相互呈前后镜像对称设置。
11、在上述一种心电图采集机器人的技术方案中,优选地,所述外壳的顶部表面均开设有供伺服驱动电机输出轴贯穿和转动的半圆形通孔,通孔内部安装有与伺服驱动电机输出轴适配的轴承,且伺服驱动电机的输出轴底端通过联轴器与蜗杆的顶端固定连接。
12、在上述一种心电图采集机器人的技术方案中,优选地,所述外壳的顶部表面均固定有一块凸块,凸块相互远离的一侧表面均固定连接有一根连接杆,且连接杆相互远离的一端分别和u形执行臂内部的缺口内壁固定连接。
13、在上述一种心电图采集机器人的技术方案中,优选地,所述蜗轮的内部均贯穿固定有一根轴销,轴销的左右两端分别和外壳相互靠近的一侧内壁转动连接。
14、在上述一种心电图采集机器人的技术方案中,优选地,所述蜗轮相互靠近的一侧表面上均开设有沟槽,沟槽的内部均等距离固定有若干个与蜗轮啮合的齿牙,且外壳底部表面均开设有两个供橡胶爪竖直上下活动的矩形通孔。
15、在上述一种心电图采集机器人的技术方案中,优选地,所述方向槽的顶部端口边缘与u形执行臂前端表面固定连接,方向槽的底端端口边缘通过螺钉与风筒的顶部表面固定连接,其中,伺服风机包括有固定在风筒内腔中马达,与马达输出轴连接的扇叶。
16、由上述技术方案可知,本发明提供一种心电图采集机器人与现有技术相比,本发明具有以下有益效果:
17、本发明的技术方案中设置能够自动将导联电极吸附在患者胸口正确位置的机械臂,同时机械臂上设置工业视觉系统配合机械臂找寻导联电极吸附位置,以简化人工操作的流程。而且在机械臂末端设置夹爪机构,能够适配导联电极准确抓取并吸附在患者皮肤上;通过在机械臂的执行端位置增设内置夏季风干、冬季暖风干患者皮肤的风干机构,实现对导联电极吸附区域皮肤的干燥处理,防止导联电极因皮肤的汗液和油脂过多而脱落。
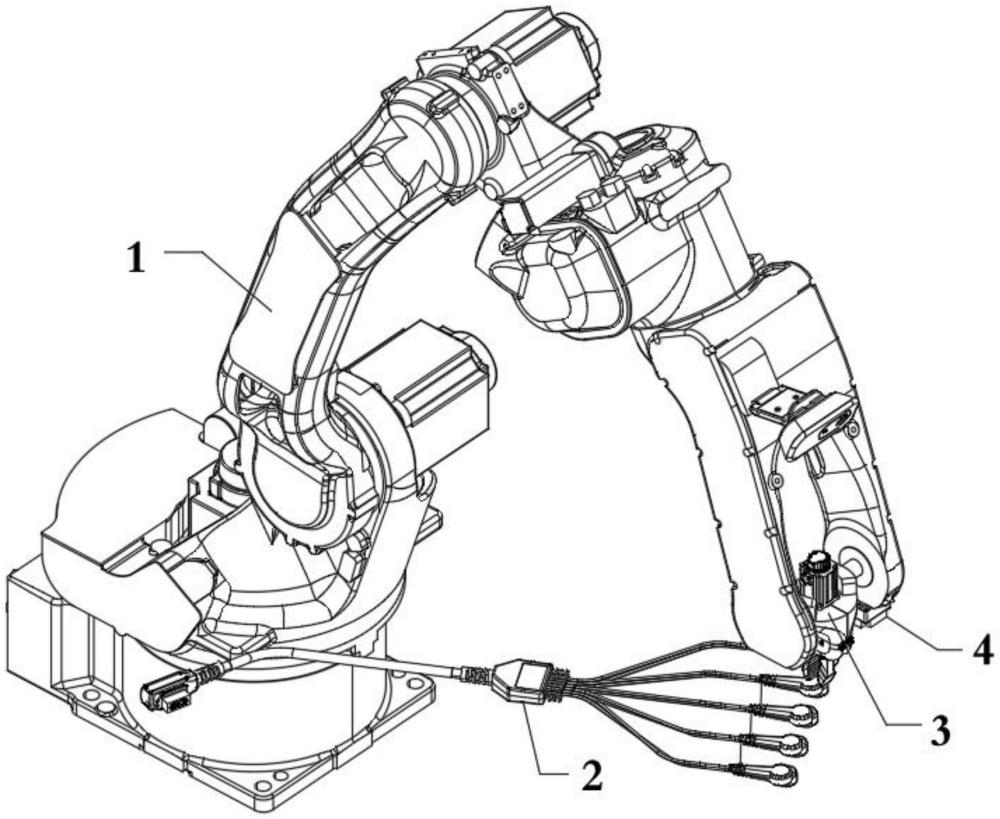
技术特征:1.一种心电图采集机器人,包括机械操作臂机构(1),其特征在于,所述机械操作臂机构(1)的末端端头设置有导联线电极夹爪(3),且机械操作臂机构(1)的末端侧壁上固定有皮肤干燥机构(4),导联线电极夹爪(3)的夹持端口中夹持有心电图导联线机构(2);
2.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述u形执行臂(14)远离小臂(13)的前端内部开设有缺口,用于供导联线电极夹爪(3)放置固定在u形执行臂(14)的内部中,且工业视觉摄像头(15)的后端表面通过螺钉锁紧连接在u形执行臂(14)的前侧表面上。
3.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述轴向旋转基座(11)的底部表面四角通过螺栓锁紧连接在病床的旁边,且机械操作臂机构(1)和工业视觉摄像头(15)的数据传输端以及接入端均通过电缆与医用计算机终端连接。
4.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述导联线插头(21)的插接端插入到心电图仪器的信号接收端口中,且支线(24)共有十八根且依次标记为十八种不同颜色;其中,电极端头(25)的外表面被橡胶爪(34)相互靠近的一侧表面夹持。
5.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述外壳(31)相互靠近的一侧表面四角通过四枚螺钉锁紧连接,外壳(31)的前侧和后侧均开设有一道供蜗轮(33)放置和滑动的斜槽(32),斜槽(32)均与水平面之间具有30-45°的夹角,且斜槽(32)相互呈前后镜像对称设置。
6.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述外壳(31)的顶部表面均开设有供伺服驱动电机(37)输出轴贯穿和转动的半圆形通孔,通孔内部安装有与伺服驱动电机(37)输出轴适配的轴承,且伺服驱动电机(37)的输出轴底端通过联轴器与蜗杆(36)的顶端固定连接。
7.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述外壳(31)的顶部表面均固定有一块凸块(38),凸块(38)相互远离的一侧表面均固定连接有一根连接杆(39),且连接杆(39)相互远离的一端分别和u形执行臂(14)内部的缺口内壁固定连接。
8.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述蜗轮(33)的内部均贯穿固定有一根轴销,轴销的左右两端分别和外壳(31)相互靠近的一侧内壁转动连接。
9.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述蜗轮(33)相互靠近的一侧表面上均开设有沟槽,沟槽的内部均等距离固定有若干个与蜗轮(33)啮合的齿牙,且外壳(31)底部表面均开设有两个供橡胶爪(34)竖直上下活动的矩形通孔。
10.根据权利要求1所述的一种心电图采集机器人,其特征在于,所述方向槽(41)的顶部端口边缘与u形执行臂(14)前端表面固定连接,方向槽(41)的底端端口边缘通过螺钉与风筒(43)的顶部表面固定连接,其中,伺服风机(44)包括有固定在风筒(43)内腔中马达,与马达输出轴连接的扇叶。
技术总结本发明公开了一种心电图采集机器人,本发明涉及心电图采集器械技术领域,现提出如下方案,其包括机械操作臂机构,所述机械操作臂机构的末端端头设置有导联线电极夹爪,且机械操作臂机构的末端侧壁上固定有皮肤干燥机构。本发明的技术方案中设置能够自动将导联电极吸附在患者胸口正确位置的机械臂,同时机械臂上设置工业视觉系统配合机械臂找寻导联电极吸附位置。而且在机械臂末端设置夹爪机构,能够适配导联电极准确抓取并吸附在患者皮肤上;通过在机械臂的执行端位置增设内置夏季风干、冬季暖风干患者皮肤的风干机构,实现对导联电极吸附区域皮肤的干燥处理,防止导联电极因皮肤的汗液和油脂过多而脱落。技术研发人员:熊凤娟,邓昊敏,艾蓉,傅强受保护的技术使用者:深圳大学附属华南医院技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354254.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表