用于确定机动车辆中的量的系统和方法与流程
- 国知局
- 2025-01-10 13:47:38
本发明涉及尤其是当用于驱动机动车辆的马达机组的至少一个组件的量不是由传感器直接测量时确定所述量的方法。在此情况下,应当根据所取得的其它信息和/或其它参数来估计所述量。在全文中,(热力或电动)马达机组指明直接或间接参与车辆的牵引的组件的集合,并且可以包括辅助处理组件,如污染消除组件。所述量指明至少一个物理参数。其有利地涉及温度,例如电动马达的转子的温度,或对电动马达供电的电池的温度,或功率电子部件温度,或气缸中的喷射的上游的燃料温度等。然而,本发明不被限制于其中感感兴趣量是温度的情况。在任何情况下,感兴趣量与其值被由至少一个计算机使用以驱动马达机组的至少一个组件的至少一个参数有关。在批量车辆配置中,不可能设想传感器能够直接测量这些量。
背景技术:
1、已知使用基于物理定律的模型的估计系统,以确定感兴趣量的估计。模型使用可测量的量。利用算法函数的使用,其能够提供并非直接可测量的感兴趣量的估计作为输出。
2、还已知使用受监督学习神经网络(简称“rn”)。学习域被限制于受监督学习操作。因此,在rn学习的情况的覆盖方面存在缺陷。在实践中,这种覆盖因此被证实为是不完整的。倘若遇上未被神经网络的学习情形的试验规划覆盖的情况,则因此存在输出量发散的风险。
3、发明人已经寻求改进该情形。
技术实现思路
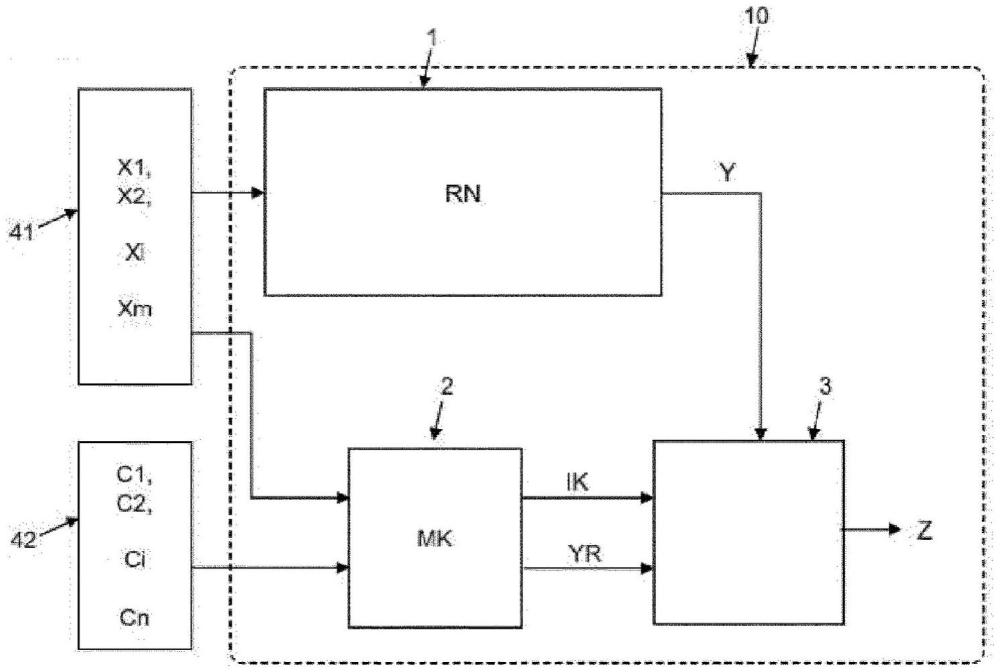
1、为此,根据本公开,提出了一种用于迭代地确定车辆的机动化系统中的至少一个感兴趣量的系统,所述感兴趣量不是由传感器直接测量的,所述系统包括:
2、-受监督学习估计模块,其取得第一输入数据xi集作为输入,并且提供至少一个中间输出量y作为输出,
3、-真实性验证模块mk,其取得第一输入数据xi集和第二输入数据cj集作为输入,并且提供真实性指数ik作为输出;
4、-下游处理模块,其取得真实性指数ik和中间输出量y作为输入,并且提供对应于所述感兴趣量的最终输出量z作为输出,
5、-下游处理模块被配置为使得:
6、当真实性指数ik为良好时,最终输出量z表示中间输出量y,优选地等于中间输出量y;
7、当真实性指数ik为不良时,最终输出量尤其是来自物理表示模型(或简称“物理模型”)。
8、注意的是,受监督学习估计模块可以是例如神经网络模块。然而,可以考虑其它类型的受监督学习模块,如例如决策树、核回归、大边缘分离(séparatriceàvaste marge)。神经网络解决方案现在是熟知的并且容易实施。
9、被分类在“良好”类别中的真实性指数基本上与由受监督学习估计模块(例如神经网络模块)的学习规划覆盖的条件有关。被分类在“不良”类别中的真实性指数基本上与未被受监督学习估计模块的学习规划覆盖的情况有关。
10、“良好”或“不良”因此指明了针对真实性指数(ik)的两个分类或类别,其例如被由一个或多个预定阈值分离(例如根据真实性指数为一个或多个维度的矢量)。至少一个阈值是考虑到受监督学习估计模块的已知学习规划而有利地是预定的,并且被记录在下游处理模块的存储器中。
11、换言之:
12、-当真实性指数(ik)为良好时,借助于基于人工智能的模型获得最终输出量z,模型是在初步学习步骤的结束时获得的;并且
13、-当真实性指数(ik)为不良时,尤其是借助于基于物理定律的物理表示模型获得最终输出量z。
14、从良好的真实性指数切换到不良的真实性指数因此表现为从借助于受监督学习估计模块通过人工智能确定最终量向借助于根据预定物理参数表示所述量的演变的物理模型确定最终量的切换。
15、凭借于此,可以避免在其中特定的状况条件远不同于由受监督学习覆盖的域的情况下必需使用受监督学习估计模块的异常输出。换言之,在当前操作条件实质上处于其中受监督学习被实行的域之外时,选择开环物理模型。该开环物理模型即使其并非十分准确或者在任何情况下不如受监督学习估计模块的输出准确,也允许避免遇到造成受监督学习估计模块(例如神经网络模块)发散的异常值。
16、在最常见的情况下,借助于受监督学习估计模块确定最终输出量z。它于是具有高准确性,并且获得它仅需要有限的计算能力。
17、其中借助于物理表示模型确定最终输出量的情况仍然是鲜见的。因此物理表示模型不需要具有非常高的准确性,从而再次地,确定最终输出量仅需要有限的计算能力。因此,本发明允许提供一种迭代地确定至少一个感兴趣量的系统,该系统在平均来说提供高准确性的同时要求有限的计算能力(因此具有降低的制造成本和/或高的计算速度)。
18、感兴趣量与至少一个参数有关,至少一个参数的值被由至少一个计算机使用以根据由所述感兴趣量取得的值驱动马达机组的至少一个组件。
19、应当注意,量xi、cj、y和z是值的时间序列。xi和ci来自于采样过程,并且y和z是由上面提到的模块迭代地计算的。因此,符号xi实际上表示时间序列xi(tk),符号cj表示时间序列cj(tk),符号y表示时间序列y(tk),符号z表示时间序列z(tk)。变量k在此是采样和计算的递归指数。表述“最终输出量z表示中间输出量y”意指应当理解为最终输出量z可以直接等于y,或者确实对应于在应用滤波器(例如平滑滤波器)之后的值y。换言之,z(tk)=f3(y(tk)),其中函数f3是例如具有平滑和限幅的数字滤波器。
20、优选地取:
21、z=f(ci,xj,y,t)+ct;
22、其中:
23、ci是属于第二输入数据集的输入数据中的至少一部分,并且优选地是整个第二输入数据集;
24、xj是属于第一输入数据集的输入数据中的至少一部分,优选地是整个第一输入数据集;
25、y是中间输出量;
26、t是从最近的良好真实性指数到不良真实性指数的切换(向物理模型的切换)的时刻起测量的时刻;以及
27、ct是常数。
28、优选地,常数ct能够在向物理模型切换期间建立由最终输出量z取得的值的连续性。
29、在本发明的各种实施例中,可能地还可以依赖被单独或组合地取得的以下布置中的一个或多个。
30、根据一个方面,可以规定当真实性指数ik在时刻t1从良好变为不良时,ct使得输出z在时刻t1免于不连续性。有利地,甚至在向开环模型解决方案切换的情况下,对于使用感兴趣量的驱动功能而言不存在不连续性。
31、根据一个方面,函数f是或使用开环模型函数(yr)。这样的函数易于实施并且需要非常少的存储器。开环模型函数yr表示良好的可靠后退解决方案,即使其可能稍微不如神经网络的输出准确。
32、根据本发明,在真实性验证模块中,真实性指数表征第一输入数据(xi)集与第一参考输入数据域之间和/或第二输入数据(ci)集与第二参考输入数据域之间的距离度量,并且距离度量(md)的值越大,真实性指数越是“不良”。
33、相反,距离度量的值越小,真实性指数越是“良好”。
34、当距离度量的值超过第一预定阈值(md1)时,可以因此发生向物理模型的切换。当距离度量的值变为低于第二预定阈值(md2)时,可以发生返回到正常,即使用神经网络的输出。
35、根据一个方面,感兴趣量是与车辆的机动化系统相连的组件的温度,例如电动马达的转子的温度、或电池单元的温度、或功率电子部件的温度、或气缸中的喷射的上游的燃料温度。发明人已经注意到,温度测量特别良好地适合于在此升级的方法和系统的应用。
36、根据一个方面,感兴趣量是车辆的机动化系统的流体的温度,例如燃料的温度。在具有热力马达的车辆中,特定流体的温度可能实质上影响燃料喷射和点火的驱动的校准。
37、根据又一另外的变型,感兴趣量可以是流体(例如,热力马达中的空气)或液体(例如,热力马达或电动马达的燃料或部件的冷却液)的流速。
38、根据一个方面,量y和z可以是多维量。例如,其可以涉及在不同位置处估计的多个温度;例如,对于电动牵引马达的转子而言,可以考虑转轴的温度、绕组或永磁体的温度、转子的一个轴向侧和另一轴向侧之间的温度梯度。
39、根据一个方面,下游处理模块包括数字滤波功能和/或限幅功能。限幅功能允许排除异常的或处于正常预期区间之外的任何值,并且滤波功能允许避免使用感兴趣量的驱动功能中的突然变化。
40、根据另一方面,可以规定的是,三个模块,即受监督学习估计模块、真实性验证模块和下游处理模块,被包含在单个计算单元中。这可以涉及不同于或集总于至少一个计算机的计算单元,其根据由所述感兴趣量取得的值驱动马达机组的至少一个组件。因此,在热力马达机动化系统的情况下,三个模块例如被直接托管在马达控制计算机中或马达机组监督器中。对于其中三个模块可以被直接实现在牵引控制计算机中或操作监督器中的电动机动化的情况而言亦是如此。作为变型,三个模块可以被托管在连接到使用感兴趣量来驱动马达机组的至少一个组件的至少一个辅助计算机的辅助计算单元中。
41、根据其它实现,模块可以处于不同的单元中。
42、根据另一方面,按至少等于每秒一次的频率来执行最终输出量(z)的计算。因此,计算迭代足够快,并且感兴趣量的信息的提供被完成并且被实时刷新。
43、根据另一方面,本发明还涉及一种用于迭代地确定被用于驱动机动车辆的马达机组的至少一个组件的至少一个感兴趣量的方法,所述感兴趣量不是由传感器直接测量的,所述方法包括:
44、-提供第一输入数据x集,
45、-将第一输入数据集注入到受监督学习估计模块中,
46、-获得至少一个中间输出量y作为输出,
47、-提供第二输入数据c集,
48、-将第一输入数据x集和第二输入数据c集注入到真实性验证模块中,并且获得真实性指数(ik)作为输出,
49、-将中间输出量y和真实性指数ik注入到下游处理模块中,下游处理模块提供对应于所述感兴趣量的最终输出量z作为输出,
50、-当真实性指数ik为良好时,选取表示中间输出量y的值用于最终输出量z,
51、-当真实性指数ik为不良时,选取尤其是来自物理表示模型的值用于最终输出量。
52、本发明特别是涉及一种用于迭代地确定车辆的机动化系统中的至少一个感兴趣量的方法。
53、如前面详述的那样,以有利的方式,当真实性指数(ik)为不良的时,最终输出量来自于由如下限定的函数f:
54、z=f(ci,xj,y,t)+ct;
55、其中:
56、ci是第二输入数据集的数据中的至少一部分;
57、wj是第一输入数据集的数据中的至少一部分;
58、y是中间输出量;
59、t是从最近的良好真实性指数到不良真实性指数的切换起的时刻;并且
60、ct是常数。
61、根据本发明,在真实性验证模块中,真实性指数表征第一输入数据(xi)集与第一参考输入数据域之间和/或第二输入数据(ci)集与第二参考输入数据域之间的距离度量,并且距离(md)的值越大,真实性指数越是“不良”。
62、相反,距离越小,真实性指数越是“良好”。
63、当距离度量的值超过第一预定阈值(md1)时,可以因此发生向物理模型的切换。当距离度量的值变为低于第二预定阈值(md2)时,可以发生返回到正常,即使用神经网络的输出。
64、根据一个方面,当真实性指数ik在时刻t1从良好变为不良时,ct使得输出z在时刻t1免于不连续性。
65、并且当真实性指数ik在时刻t2从不良变为良好时,输出z切换到神经网络的输出,可能在时刻t2具有不连续性。
66、此外,凭借渐次切换系统(交叉的相对权重w1 w2),可以避免这两种切换情形下的输出不连续性。尤其是如果以上描述的预定阈值md1和md2是不同的,则还可以通过迟滞机制来稳定切换。
67、本发明还涉及一种计算机,其特征在于,其包括如以上描述的系统或者其实施如以上描述的方法。其可以直接涉及专用于控制机动车辆的马达机组的至少一个组件的计算机,例如马达控制计算机,或者涉及连接到用于控制机动车辆的马达机组的至少一个组件的至少一个计算机的辅助计算机。
本文地址:https://www.jishuxx.com/zhuanli/20250110/355276.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表