一种大坝裂缝监测多功能机器人的制作方法
- 国知局
- 2025-01-17 12:56:39
本发明涉及机器人,具体为一种大坝裂缝监测多功能机器人。
背景技术:
1、对大坝是否产生了裂缝进行监测直接关系到其结构的稳定性和安全性。裂缝监测的目的是及时发现裂缝的产生和扩展趋势,以便采取及时补救措施,防止裂缝进一步发展,确保大坝的结构安全。裂缝监测通过实时、准确的监测和分析,可以提前预警和防范潜在的安全隐患。也可以延长大坝的使用寿命。裂缝如果不及时处理,可能会导致大坝结构损坏,甚至引发严重的安全事故。
2、现有技术中针对大坝裂缝监测过程通过定点式安装多个超声波探测设备,来对大坝内部或者表面是否产生裂缝进行探测,但是该方案对于大型的大坝所需要搭建的超声波探测设备数量较多,成本较高,且两个探测设备中间区域检测精准性下降,而采用移动式的探测机器人,可以通过单一的监测设备实现大范围检测覆盖,但是会在移动探测时按压到地面的灰尘或者垃圾上,进而阻挡探头与大坝表面混凝土的接触效果,这就会干扰该点位的检测可靠性。
技术实现思路
1、在针对现有技术存在的不足,本发明目的是提供一种大坝裂缝监测多功能机器人,以解决上述背景技术中提出的问题,本发明实现移动式测量,仅需要单一的监测设备即可完成探测,并能够避免大坝表面积存的灰尘或者垃圾阻挡,确保监测时的可靠性和灵敏性,且能够针对性的仅对即将按压监测的点位进行清理,因此延长了对该机器人表面除尘箱的人工清理周期,底部的监测机械臂部分也能够避免产生滑动摩擦现象,延长了超声波探头的使用寿命。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种大坝裂缝监测多功能机器人,包括多功能机器人本体,所述多功能机器人本体包括移送小车、监测机械臂、预清理机构和驱动机构,所述移送小车的侧边底部焊接有多个导向轮,所述导向轮的底部铺设有监测导轨,所述移送小车的顶部螺接有顶板,所述顶板的表面开设有第一平移通道和第二平移通道,所述监测机械臂的顶部焊接有立柱,所述立柱的顶部从第一平移通道的内部向上穿出,所述顶板的表面还螺接有除尘箱,所述监测机械臂的一端插装有联动臂,所述联动臂的末端套设有预清理机构,所述预清理机构的顶部从第二平移通道的内部向上穿出,所述移送小车的内侧安装有移动轮,所述驱动机构从移动轮的中间位置穿过,且驱动机构通过旋转运动后顶靠在监测机械臂的表面。
3、进一步的,所述驱动机构包括电机和驱动轴,所述驱动轴的底部焊接有下挂板,所述下挂板的侧边套设有转动滚筒,所述转动滚筒的两端均一体化成型有卡板。
4、进一步的,所述下挂板的中间穿插有第四弹簧杆,所述电机的外壳部分螺接在移送小车的侧边,所述驱动轴插装在电机的输出端。
5、进一步的,所述监测机械臂包括活动杆、第一超声波探头和第二超声波探头,所述活动杆的两端顶部焊接有升降套筒,所述升降套筒的内部穿插有第一弹簧杆,所述第一弹簧杆的底部焊接有按压板,所述按压板的底部贴装有防滑垫。
6、进一步的,所述第一超声波探头和第二超声波探头均插装在活动杆的底部,且第一超声波探头和第二超声波探头之间的间距与移动轮的边缘周长相同,所述立柱焊接在活动杆的表面。
7、进一步的,所述立柱的中间穿插有第三弹簧杆,所述立柱的侧边焊接有限位夹板,所述限位夹板卡在顶板的表面,所述立柱的两侧均穿插有第二弹簧杆,所述第一平移通道的内壁开设有伸缩槽。
8、进一步的,所述第二弹簧杆嵌入到伸缩槽的内部,所述立柱和第一平移通道的数量均为两个,所述转动滚筒用于按压在活动杆的表面,且两个卡板之间的间距与活动杆的宽度相同,所述活动杆处于两个移动轮的中间位置。
9、进一步的,所述预清理机构包括围挡仓和限位管道,所述围挡仓的底部侧边开设有进气孔,所述围挡仓的内部铺设有隔网,所述围挡仓的顶部粘接有盖板,所述盖板焊接在限位管道的底部。
10、进一步的,所述限位管道的底部侧边一体化成型有对接盘,所述对接盘的侧边开设有对接孔,所述对接孔的内部插装有联动臂,所述联动臂的另一端焊接在活动杆的端部。
11、进一步的,所述除尘箱的侧边放置有风机,所述风机的一端插装有抽气管道,所述限位管道的顶部从第二平移通道的内部穿过,且抽气管道的末端嵌入到限位管道的顶部位置,所述围挡仓的中心点至第二超声波探头中心点之间的距离与移动轮的周长相同。
12、本发明的有益效果:
13、1.该大坝裂缝监测多功能机器人通过移送小车配合驱动机构和监测导轨,能够实现移动式测量,仅需要单一的监测设备即可完成探测,底部的监测机械臂部分配合自身的多组弹性结构以及防滑结构,能够在将超声波探头与地面接触的时间段内脱离与移送小车之间的同步移动状态,因此能够避免产生滑动摩擦现象,延长了超声波探头的使用寿命。
14、2.该大坝裂缝监测多功能机器人通过监测机械臂与后端的预清理机构部分进行联动使用,因此能够在对大坝表面进行监测前,预先对地面上的灰尘和垃圾进行清洁处理,能够避免大坝表面积存的灰尘或者垃圾阻挡,确保监测时的可靠性和灵敏性。
15、3.该大坝裂缝监测多功能机器人由于预清理机构部分可以与监测机械臂同步运动,因此能够针对性的仅对即将按压监测的点位进行清理,其余不会被超声波探头产生直接按压接触的位置则不需要进行清理,所以减少了灰尘的吸入速度,也就延长了对该机器人表面除尘箱的人工清理周期。
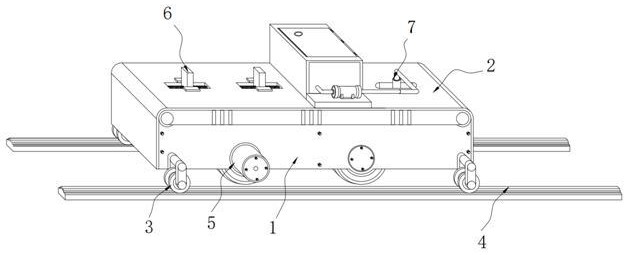
技术特征:1.一种大坝裂缝监测多功能机器人,包括多功能机器人本体,其特征在于:所述多功能机器人本体包括移送小车(1)、监测机械臂(6)、预清理机构(7)和驱动机构(5),所述移送小车(1)的侧边底部焊接有多个导向轮(3),所述导向轮(3)的底部铺设有监测导轨(4),所述移送小车(1)的顶部螺接有顶板(2),所述顶板(2)的表面开设有第一平移通道(22)和第二平移通道(29),所述监测机械臂(6)的顶部焊接有立柱(16),所述立柱(16)的顶部从第一平移通道(22)的内部向上穿出,所述顶板(2)的表面还螺接有除尘箱(30),所述监测机械臂(6)的一端插装有联动臂(20),所述联动臂(20)的末端套设有预清理机构(7),所述预清理机构(7)的顶部从第二平移通道(29)的内部向上穿出,所述移送小车(1)的内侧安装有移动轮(8),所述驱动机构(5)从移动轮(8)的中间位置穿过,且驱动机构(5)通过旋转运动后顶靠在监测机械臂(6)的表面。
2.根据权利要求1所述的一种大坝裂缝监测多功能机器人,其特征在于:所述驱动机构(5)包括电机(23)和驱动轴(24),所述驱动轴(24)的底部焊接有下挂板(25),所述下挂板(25)的侧边套设有转动滚筒(27),所述转动滚筒(27)的两端均一体化成型有卡板(28)。
3.根据权利要求2所述的一种大坝裂缝监测多功能机器人,其特征在于:所述下挂板(25)的中间穿插有第四弹簧杆(26),所述电机(23)的外壳部分螺接在移送小车(1)的侧边,所述驱动轴(24)插装在电机(23)的输出端。
4.根据权利要求2所述的一种大坝裂缝监测多功能机器人,其特征在于:所述监测机械臂(6)包括活动杆(9)、第一超声波探头(10)和第二超声波探头(11),所述活动杆(9)的两端顶部焊接有升降套筒(12),所述升降套筒(12)的内部穿插有第一弹簧杆(13),所述第一弹簧杆(13)的底部焊接有按压板(14),所述按压板(14)的底部贴装有防滑垫(15)。
5.根据权利要求4所述的一种大坝裂缝监测多功能机器人,其特征在于:所述第一超声波探头(10)和第二超声波探头(11)均插装在活动杆(9)的底部,且第一超声波探头(10)和第二超声波探头(11)之间的间距与移动轮(8)的边缘周长相同,所述立柱(16)焊接在活动杆(9)的表面。
6.根据权利要求5所述的一种大坝裂缝监测多功能机器人,其特征在于:所述立柱(16)的中间穿插有第三弹簧杆(19),所述立柱(16)的侧边焊接有限位夹板(17),所述限位夹板(17)卡在顶板(2)的表面,所述立柱(16)的两侧均穿插有第二弹簧杆(18),所述第一平移通道(22)的内壁开设有伸缩槽(21)。
7.根据权利要求6所述的一种大坝裂缝监测多功能机器人,其特征在于:所述第二弹簧杆(18)嵌入到伸缩槽(21)的内部,所述立柱(16)和第一平移通道(22)的数量均为两个,所述转动滚筒(27)用于按压在活动杆(9)的表面,且两个卡板(28)之间的间距与活动杆(9)的宽度相同,所述活动杆(9)处于两个移动轮(8)的中间位置。
8.根据权利要求4所述的一种大坝裂缝监测多功能机器人,其特征在于:所述预清理机构(7)包括围挡仓(36)和限位管道(33),所述围挡仓(36)的底部侧边开设有进气孔(37),所述围挡仓(36)的内部铺设有隔网(38),所述围挡仓(36)的顶部粘接有盖板(39),所述盖板(39)焊接在限位管道(33)的底部。
9.根据权利要求8所述的一种大坝裂缝监测多功能机器人,其特征在于:所述限位管道(33)的底部侧边一体化成型有对接盘(34),所述对接盘(34)的侧边开设有对接孔(35),所述对接孔(35)的内部插装有联动臂(20),所述联动臂(20)的另一端焊接在活动杆(9)的端部。
10.根据权利要求9所述的一种大坝裂缝监测多功能机器人,其特征在于:所述除尘箱(30)的侧边放置有风机(31),所述风机(31)的一端插装有抽气管道(32),所述限位管道(33)的顶部从第二平移通道(29)的内部穿过,且抽气管道(32)的末端嵌入到限位管道(33)的顶部位置,所述围挡仓(36)的中心点至第二超声波探头(11)中心点之间的距离与移动轮(8)的周长相同。
技术总结本发明提供一种大坝裂缝监测多功能机器人,涉及机器人技术领域,包括移送小车、监测机械臂、预清理机构和驱动机构,移送小车的侧边底部焊接有多个导向轮,所述导向轮的底部铺设有监测导轨,移送小车的顶部螺接有顶板,所述顶板的表面开设有第一平移通道和第二平移通道,所述监测机械臂的顶部焊接有立柱,本发明实现移动式测量,仅需要单一的监测设备即可完成探测,并能够避免大坝表面积存的灰尘或者垃圾阻挡,确保监测时的可靠性和灵敏性,且能够针对性的仅对即将按压监测的点位进行清理,因此延长了对该机器人表面除尘箱的人工清理周期,底部的监测机械臂部分也能够避免产生滑动摩擦现象,延长了超声波探头的使用寿命。技术研发人员:曹宏君,邹维维,曾燕燕,毕刚刚,付杰受保护的技术使用者:中水信通科技(武汉)有限公司技术研发日:技术公布日:2025/1/13本文地址:https://www.jishuxx.com/zhuanli/20250117/355834.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表