一种基于机器人的变电站巡检处理方法与流程
- 国知局
- 2025-01-17 12:51:31
本发明属于机器人,尤其涉及一种基于机器人的变电站巡检处理方法。
背景技术:
1、现有技术方案在进行变电站的巡检处理时,往往是利用人工巡检的形式进行变电站的电气设备的巡检处理,使得巡检处理难度和可靠性均无法满足要求,在发明专利申请cn202410668126.x《一种变电站巡检机器人及其运行方法》中通过对巡检机器人获得的360°全景图像数据的有效处理,提高模型的巡检安排精准度,不仅降低人工巡查成本,还可协助运维人员进行巡查路线规划,但是却存在以下技术问题:
2、在进行变电站的巡检处理时,由于巡检机器人的设备参数的差异,导致其进行巡检处理时可能会存在某些盲点或者不可靠巡检点,同时外部环境因素也会对机器人的巡检图像造成一定程度的影响,因此若不能根据巡检机器人的巡检数据生成差异化的人工巡检策略,则无法保证变电站的巡检处理的可靠性。
3、针对上述技术问题,具体的本申请提供一种基于机器人的变电站巡检处理方法。
技术实现思路
1、为实现本发明目的,本发明采用如下技术方案:
2、根据本发明的一个方面,提供了一种基于机器人的变电站巡检处理方法。
3、一种基于机器人的变电站巡检处理方法,具体包括:
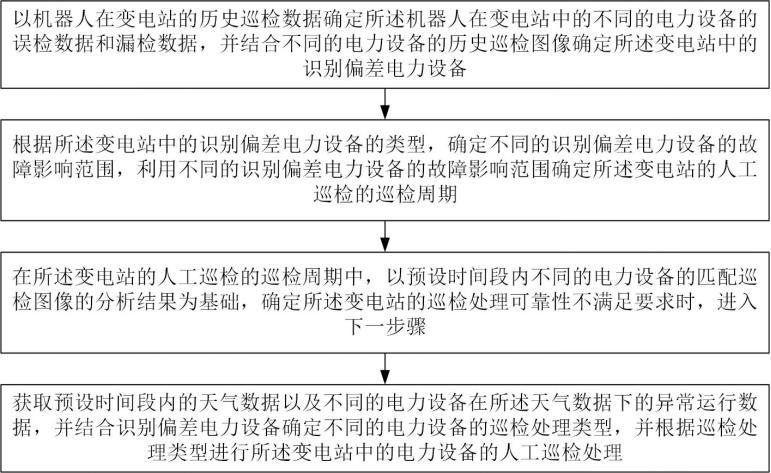
4、s1以机器人在变电站的历史巡检数据确定所述机器人在变电站中的不同的电力设备的误检数据和漏检数据,并结合不同的电力设备的历史巡检图像确定所述变电站中的识别偏差电力设备;
5、s2根据所述变电站中的识别偏差电力设备的类型,确定不同的识别偏差电力设备的故障影响范围,利用不同的识别偏差电力设备的故障影响范围确定所述变电站的人工巡检的巡检周期;
6、s3在所述变电站的人工巡检的巡检周期中,以预设时间段内不同的电力设备的匹配巡检图像的分析结果为基础,确定所述变电站的巡检处理可靠性不满足要求时,进入下一步骤;
7、s4获取预设时间段内的天气数据以及不同的电力设备在所述天气数据下的异常运行数据,并结合识别偏差电力设备确定不同的电力设备的巡检处理类型,并根据巡检处理类型进行所述变电站中的电力设备的人工巡检处理。
8、本发明的有益效果在于:
9、以预设时间段内不同的电力设备的匹配巡检图像的分析结果为基础,确定变电站的巡检处理可靠性是否满足要求,从而避免采用固定的巡检周期导致的变电站的巡检处理的可靠性不足的技术问题的出现,并利用电力设备的匹配巡检图像的分析结果,实现了变电站中匹配巡检图像的图像清晰度存在偏差的电力设备的筛选,进而实现了根据变电站的巡检处理可靠性的差异进行差异化的人工巡检处理的 策略的确定。
10、利用预设时间段内的天气数据以及不同的电力设备在天气数据下的异常运行数据,确定不同的电力设备的巡检处理类型,充分考虑到不同的电力设备在预设时段内的异常概率,并利用异常概率进行巡检处理类型的确定,保证了巡检处理的可靠性,同时也保证了识别偏差电力设备的识别处理可靠性。
11、进一步的技术方案在于,所述历史巡检数据包括不同的电力设备对应的历史巡检图像和故障巡检结果。
12、进一步的技术方案在于,所述误检数据包括所述电力设备的误检次数以及不同的误检次数的误检处理时长。
13、进一步的技术方案在于,所述漏检数据包括所述电力设备的漏检次数以及不同的漏检次数的漏检处理时长。
14、进一步的技术方案在于,所述变电站中的识别偏差电力设备的确定的方法为:
15、以机器人在变电站中电力设备的误检数据和漏检数据,确定所述电力设备的误检次数占比以及漏检次数占比;
16、根据所述电力设备的历史巡检图像确定所述电力设备在不同的历史巡检图像的图像特征,基于所述图像尺寸在所述历史巡检图像中尺寸占比确定识别偏差系数;
17、根据所述误检次数占比、漏检次数占比与识别偏差系数确定所述电力设备的综合识别偏差系数,并利用所述综合识别偏差系数确定所述电力设备是否为识别偏差电力设备。
18、进一步的技术方案在于,所述电力设备的巡检处理类型包括关注巡检处理类型、重点巡检处理类型以及一般巡检处理类型。
19、进一步的技术方案在于,根据巡检处理类型进行所述变电站中的电力设备的人工巡检处理,具体包括:
20、根据电力设备的巡检处理类型确定不同的电力设备的巡检处理策略,并根据不同的电力设备的巡检处理策略进行所述变电站中的电力设备的人工巡检处理。
21、其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
22、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下:
技术特征:1.一种基于机器人的变电站巡检处理方法,其特征在于,具体包括:
2.如权利要求1所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述历史巡检数据包括不同的电力设备对应的历史巡检图像和故障巡检结果。
3.如权利要求1所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述误检数据包括所述电力设备的误检次数以及不同的误检次数的误检处理时长。
4.如权利要求1所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述变电站中的识别偏差电力设备的确定的方法为:
5.如权利要求4所述的一种基于机器人的变电站巡检处理方法,其特征在于,根据所述误检次数占比、漏检次数占比与识别偏差系数确定所述电力设备的综合识别偏差系数,具体包括:
6.如权利要求1所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述识别偏差电力设备的故障影响范围根据所述识别偏差电力设备发生故障时影响的供电范围进行确定。
7.如权利要求1所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述电力设备的巡检处理类型的确定的方法为:
8.如权利要求7所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述电力设备的巡检处理类型包括关注巡检处理类型、重点巡检处理类型以及一般巡检处理类型。
9.如权利要求7所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述电力设备的巡检处理类型根据所述修正次数对应的预设巡检处理类型进行确定。
10.如权利要求7所述的一种基于机器人的变电站巡检处理方法,其特征在于,所述天气类型包括降雨、降雪以及雾霾。
技术总结本发明提供一种基于机器人的变电站巡检处理方法,属于机器人技术领域,具体包括:利用不同的识别偏差电力设备的故障影响范围确定变电站的人工巡检的巡检周期,在变电站的人工巡检的巡检周期中,以预设时间段内不同的电力设备的匹配巡检图像的分析结果为基础,确定变电站的巡检处理可靠性不满足要求时,获取预设时间段内的天气数据以及不同的电力设备在所述天气数据下的异常运行数据,并结合识别偏差电力设备确定不同的电力设备的巡检处理类型,并根据巡检处理类型进行变电站中的电力设备的人工巡检处理,提升了变电站的巡检处理的可靠性。技术研发人员:徐瑞至,陈建辉,马彦彬,赵蛟,刘涛,刘振,周楠楠,陈飞虎,李心言,刘树文,吴赵杰,时园受保护的技术使用者:国网山东省电力公司庆云县供电公司技术研发日:技术公布日:2025/1/13本文地址:https://www.jishuxx.com/zhuanli/20250117/355691.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表