融合多维度数据的桥头跳车检测方法及系统与流程
- 国知局
- 2025-01-17 13:01:50
本发明涉及桥头跳车检测方法,更具体地说是指融合多维度数据的桥头跳车检测方法及系统。
背景技术:
1、桥头跳车是指在路面与桥面连接处,由于地面沉降或不均匀变化等原因,造成路面与桥面之间的高度差,从而导致车辆行驶时出现明显的颠簸现象。车辆在通过这一区域时,尤其是在路面到桥面或桥面到路面的过渡过程中,常常会感受到较大的震动。因此,识别并检测是否存在桥头跳车的现象变得至关重要。可以通过视觉检测、传感器数据采集和位置信息结合的方式,综合判断是否存在桥头跳车现象,并将相关信息传递给交通管理部门,以便对存在桥头跳车的路段进行及时维护。
2、目前,桥头跳车的检测通常依赖于重力传感器,这些传感器能够记录车辆行驶时的震动情况。通过测量舒适度、加速度和冲击系数等数据,判断是否存在桥头跳车的现象。然而,重力传感器的检测方法存在一定局限性,特别是在面对驾驶员的轻微颠簸操作时,会导致误判。例如,驾驶员可能因不良驾驶习惯或过度加速等原因,使得系统错误地判断为桥头跳车的现象,进而导致误报或漏报,进而影响桥头跳车的准确定位。这不仅增加了误判的风险,还可能导致交通管理部门在后续道路维护中开展大量无效的工作。因此,准确预测和判断桥头跳车的发生区域,成为亟待解决的问题。
3、因此,有必要设计一种新的方法,实现集成这些不同来源的数据,可以有效地区分因路面颠簸和其他因素造成的误判,准确识别桥头跳车发生的具体路段。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供融合多维度数据的桥头跳车检测方法及系统。
2、为实现上述目的,本发明采用以下技术方案:融合多维度数据的桥头跳车检测方法,包括:
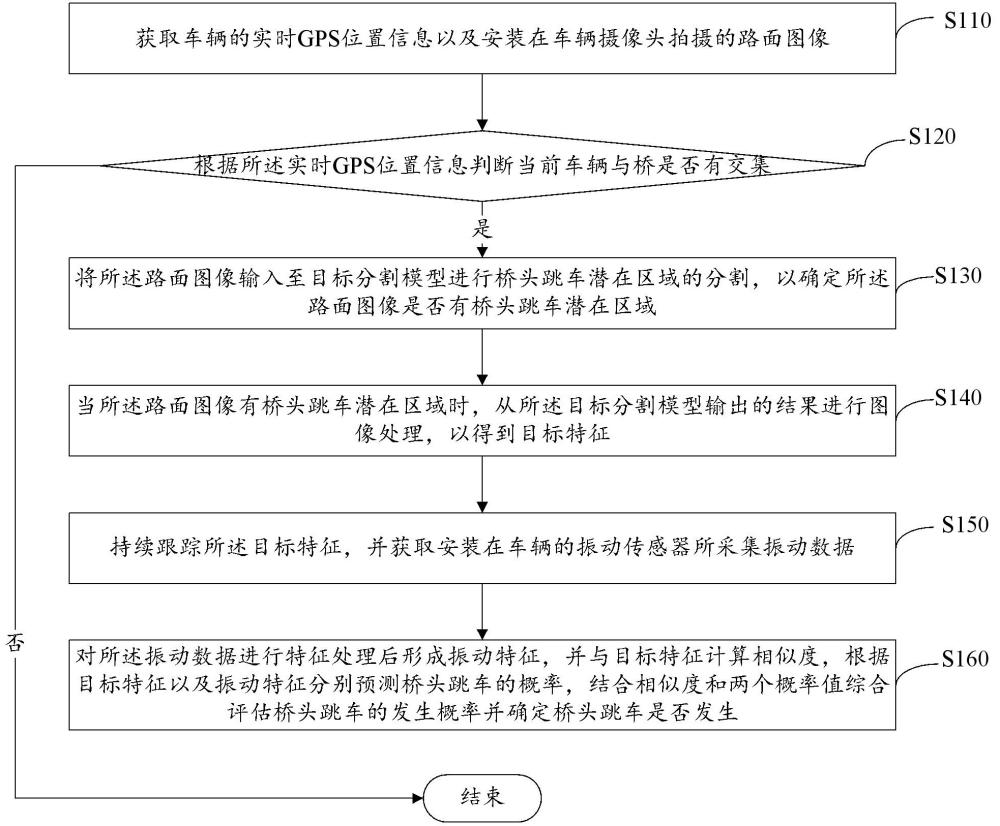
3、获取车辆的实时gps位置信息以及安装在车辆摄像头拍摄的路面图像;
4、根据所述实时gps位置信息判断当前车辆与桥是否有交集;
5、若当前车辆与桥有交集,则将所述路面图像输入至目标分割模型进行桥头跳车潜在区域的分割,以确定所述路面图像是否有桥头跳车潜在区域;
6、当所述路面图像有桥头跳车潜在区域时,从所述目标分割模型输出的结果进行图像处理,以得到目标特征;
7、持续跟踪所述目标特征,并获取安装在车辆的振动传感器所采集振动数据;
8、对所述振动数据进行特征处理后形成振动特征,并与目标特征计算相似度,根据目标特征以及振动特征分别预测桥头跳车的概率,结合相似度和两个概率值综合评估桥头跳车的发生概率并确定桥头跳车是否发生。
9、其进一步技术方案为:所述根据所述实时gps位置信息判断当前车辆与桥是否有交集,包括:
10、将所述实时gps位置信息与预先构建的桥梁gps数据库进行对比,以得到对比结果;
11、判断所述对比结果是否是所述实时gps位置信息与预先构建的桥梁gps数据库中任一桥梁的gps位置的距离符合设定要求;
12、若所述对比结果是所述实时gps位置信息与预先构建的桥梁gps数据库中任一桥梁的gps位置的距离符合设定要求,则确定当前车辆与桥有交集;
13、若所述对比结果是所述实时gps位置信息与预先构建的桥梁gps数据库中任一桥梁的gps位置的距离不符合设定要求,则确定当前车辆与桥没有交集。
14、其进一步技术方案为:所述预先构建的桥梁gps数据库是通过收集并记录桥梁的具体地理位置信息构成的数据库。
15、其进一步技术方案为:所述从所述目标分割模型输出的结果进行图像处理,以得到目标特征,包括:
16、对所述目标分割模型输出的结果生成掩模图;
17、从所述掩模图中裁剪出桥头跳车区域的特征图;
18、计算所述特征图的最小外接矩形,并使用插值方法填充所述最小外接矩形中的空白区域,且对填充后的特征图进行旋转,以得到旋转后的正矩形特征图;
19、将旋转后的正矩形特征图转换为固定尺寸的特征向量,以得到目标特征。
20、其进一步技术方案为:所述对所述振动数据进行特征处理后形成振动特征,并与目标特征计算相似度,根据目标特征以及振动特征分别预测桥头跳车的概率,结合相似度和两个概率值综合评估桥头跳车的发生概率并确定桥头跳车是否发生,包括:
21、将所述振动数据进行特征处理,以得到振动特征;
22、将所述目标特征以及所述振动特征输入至回归模型中,计算相似度,以得到计算结果;
23、将所述目标特征输入至图像分类模型中预测桥头跳车发生的概率,以得到第一概率值;
24、将所述振动特征输入至传感器分类模型中预测桥头跳车发生的概率,以得到第二概率值;
25、根据所述计算结果、所述第一概率值以及所述第二概率值综合计算最终的桥头跳车发生概率,并确定是否发生桥头跳车事件。
26、其进一步技术方案为:所述将所述振动数据进行特征处理,以得到振动特征,包括:
27、将所述振动数据进行矩阵转置,以得到振动特征。
28、其进一步技术方案为:所述将所述目标特征以及所述振动特征输入至回归模型中,计算相似度,以得到计算结果,包括:
29、将所述目标特征以及所述振动特征输入至回归模型中,由所述回归模型对所述目标特征进行深层特征提取,以得到深层图像特征;
30、由所述回归模型将所述深层图像特征以及所述振动特征分别展平为一维向量,并计算两个所述一维向量的余弦相似度,以得到计算结果。
31、其进一步技术方案为:所述根据所述计算结果、所述第一概率值以及所述第二概率值综合计算最终的桥头跳车发生概率,并确定是否发生桥头跳车事件,包括:
32、对所述第一概率值以及所述第二概率值进行加权求和,并将求和的结果与所述计算结果相乘,以得到最终的桥头跳车发生概率;
33、将所述最终的桥头跳车发生概率与设定发生阈值对比,当所述最终的桥头跳车发生概率大于设定发生阈值,则确定车辆发生桥头跳车。
34、其进一步技术方案为:所述对所述第一概率值以及所述第二概率值进行加权求和,并将求和的结果与所述计算结果相乘,以得到最终的桥头跳车发生概率,包括:
35、采用= 0.5×s×(+)计算最终的桥头跳车发生概率,其中,为最终的桥头跳车发生概率;s为计算结果;为第一概率值;为第二概率值。
36、本发明还提供了融合多维度数据的桥头跳车检测系统,包括:
37、获取单元,用于获取车辆的实时gps位置信息以及安装在车辆摄像头拍摄的路面图像;
38、判断单元,用于根据所述实时gps位置信息判断当前车辆与桥是否有交集;
39、目标分割单元,用于若当前车辆与桥有交集,则将所述路面图像输入至目标分割模型进行桥头跳车潜在区域的分割,以确定所述路面图像是否有桥头跳车潜在区域;
40、图像处理单元,用于当所述路面图像有桥头跳车潜在区域时,从所述目标分割模型输出的结果进行图像处理,以得到目标特征;
41、振动数据获取单元,用于持续跟踪所述目标特征,并获取安装在车辆的振动传感器所采集振动数据;
42、概率计算单元,用于对所述振动数据进行特征处理后形成振动特征,并与目标特征计算相似度,根据目标特征以及振动特征分别预测桥头跳车的概率,结合相似度和两个概率值综合评估桥头跳车的发生概率并确定桥头跳车是否发生。
43、本发明与现有技术相比的有益效果是:本发明通过集成实时gps位置信息、路面图像和振动数据,可以有效判断和区分桥头跳车事件与其他路面颠簸因素的区别,首先,利用实时gps信息判断车辆是否进入桥梁区域,确保只关注与桥梁相关的路段,然后,将路面图像输入目标分割模型,提取可能存在桥头跳车的潜在区域,接着,结合振动传感器采集的数据,通过特征处理生成振动特征,并与目标图像特征进行比对,计算其相似度,最终,通过综合分析图像特征和振动特征的相似度以及两者预测的桥头跳车概率,实现精准的事件预测;通过这种方式,能够有效过滤掉由于其他因素引起的误判,精确识别桥头跳车发生的路段。
44、下面结合附图和具体实施例对本发明作进一步描述。
本文地址:https://www.jishuxx.com/zhuanli/20250117/355966.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。