一种颞下颌关节急性损伤动物模型定向力加力器及使用方法与流程
- 国知局
- 2024-07-12 10:27:20
本发明属于医学设备,具体而言,涉及一种颞下颌关节急性损伤动物模型定向力加力器及使用方法。
背景技术:
1、制作颞下颌急性损伤动物模型的常用方法有手术切开法和间接性撞击法,其中间接性撞击法被认为是一种简便易行、接近颞下颌急性损伤自然发生过程的经典方法。实验时先将麻醉好的动物头颅固定,然后将一定质量的摆杆做圆弧运动下落,其末端砝码撞击击打方向校准部件,校准部件直线运动击打下颌骨,造成间接力致颞下颌关节急性损伤。
2、但是现有的间接性撞击法设计复杂,难以控制多次实验间的误差或经射钉枪或高压气室施力,危险系数较高。
技术实现思路
1、本发明旨在提供一种颞下颌关节急性损伤动物模型定向力加力器及使用方法,旨在解决现有装置危险系数较高以及多次实验之间容易出产生误差的技术问题,从而实现了对安放在试验台上的动物下颌关节重复可控击打。
2、具体的,本发明提供如下技术方案:
3、一种颞下颌关节急性损伤动物模型定向力加力器,包括:
4、高度调节组件,所述高度调节组件包括两组呈对称设置的底座、高度调节杆和支撑架,每一组高度调节杆设置在对应的底座上,用于支撑上方对应的支撑架;
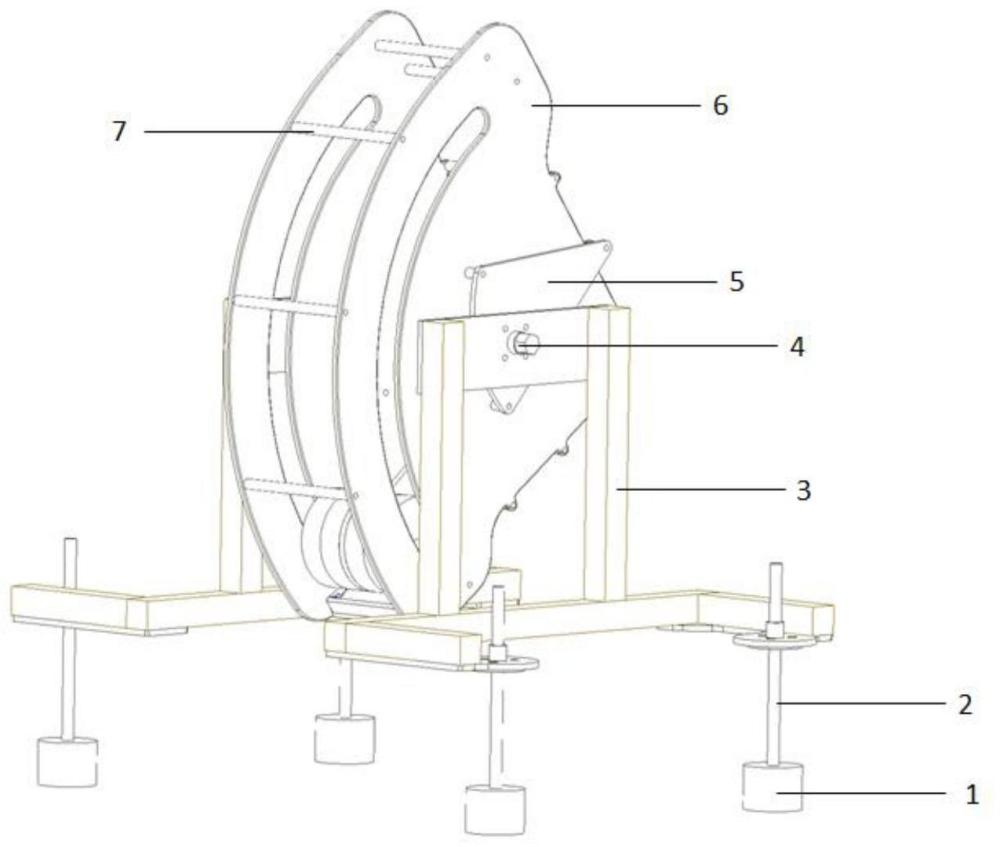
5、旋转调节组件,所述旋转调节组件包括两个对称设置且固定连接的弧形保护圈;每个所述弧形保护圈通过旋转阻尼器固定设置在支撑架上,所述弧形保护圈和支撑架之间设有旋转阻尼器安装板;以及
6、击打组件,设置在两个弧形保护圈之间位置,所述击打组件包括击打驱动部件和击打方向校准部件,所述击打驱动部件包括机器人关节模组及与其连接的连接杆,机器人关节模组安装在弧形保护圈的圆心位置处,连接杆的另一端设置有砝码;所述击打方向校准部件包括固定板和设置在固定板上的撞击杆;所述固定板固定于弧形保护圈上。
7、在本发明一个实施方式中,击打驱动部件中机器人关节模组作为动力来源,采用驱动电机、减速机、编码器和电机驱动器一体结构,以实现在精准控制输出能量的同时监测实际击打能量。
8、在本发明一个实施方式中,两个所述弧形保护圈通过设置在靠近弧形边缘上的多个连接柱连接固定。
9、优选地,所述连接柱为连接铝柱。
10、在本发明一个实施方式中,所述支撑架包括位于水平放置的u型托底和位于托底上的两个立柱,两个立柱之间设置有连接板,所述旋转阻尼器固定在连接板上。
11、在本发明一个实施方式中,每一组底座包括两个螺杆橡胶脚杯,每个螺杆橡胶脚杯的上方固定有一个对应的高度调节杆。
12、在本发明一个实施方式中,每个所述高度调节杆上均设置有支撑板,所述支撑板用于支撑上方对应的支撑架。
13、在本发明一个实施方式中,所述高度调节组件为型材角码连接构成的u形支撑结构。
14、例如,采用2020铝型材作为主要结构,使用型材角码进行连接,构成u形支撑结构,保证支架的结构强度。
15、在本发明一个实施方式中,所述旋转阻尼器采用静态扭矩为13m.m的法兰。
16、在本发明一个实施方式中,所述撞击杆上与实验动物接触的端部设有缓冲胶垫,以防止接触材料刚度过大导致实验动物出现严重表皮损伤。
17、在本发明一个实施方式中,所述缓冲胶垫为聚氨酯胶垫。
18、本发明还提供了一种使用颞下颌关节急性损伤动物模型定向力加力器的方法,包括以下步骤:
19、1)通过旋转底座调节高度调节杆;
20、2)通过旋转阻尼器,手动调节击打组件俯仰角,使撞击杆的方向调整至预期击打方向;
21、3)手动调节撞击杆至待击打状态(如图4所示的上限位),并与动物待造模部位轻接触;
22、4)在配套计算机程序中设置参数,随后启动程序,机器人关节模组旋转,带动连接杆,从而使末端安装的砝码做圆弧运动,从而产生击打能量。
23、本发明的有益效果:
24、本发明提供的颞下颌关节急性损伤动物模型定向力加力器可以满足多种类型急性损伤模型需求,减少实验中的误差,具有以下优点:
25、①撞击方向可调节:由于下颌撞击实验需要调节撞击角度,通过设计旋转阻尼器,通过手动转动即可调整击打组件的俯仰角。具体来说,旋转阻尼器选用静态扭矩为13m.m的法兰版本,使用螺栓将高度调节组件和击打组件相连,由于旋转阻尼器带来的是速度阻尼效果,因此短时的击打不会导致其出现移位,而需要调节时仅需持续用力旋转即可调节击打组件的俯仰角,从而带来简单高效的旋转调节功能。
26、②击打能量可控且可实时监测:使用集成了驱动电机、减速机、编码器和电机驱动器为一体的机器人关节模组作为动力来源,实现在精准控制输出能量的同时监测实际击打能量。击打动作执行即为机器人关节模组旋转,带动连杆旋转,从而使末端安装的砝码做圆弧运动,进而产生击打能量。使用此方法产生击打能量的优势在于,能量的产生和传递路径尽可能短,尽可能减少传递过程中的能量损失。
27、③能量施加方向精准:由于圆弧末端不利于清晰击打方向,因此需要采用“铝柱+直线轴承”的方式,将击打点的能量约束到直线轴承的轴线方向,从而便于准确控制能量施加方向。
28、④能量施加方式安全高效:现有技术或通过调节高压气室内的气体压力大小来驱动撞击杆使投射体产生不同的速度,或在ds50型射钉枪的基础上研制而成,能量施加过程存在一定安全隐患,本发明使用集成了驱动电机、减速机、编码器和电机驱动器为一体的机器人关节模组作为动力来源,能量施加方式安全高效。
29、⑤便于重复实验,能量补充便捷进行,无气动部件的排气噪声。
技术特征:1.一种颞下颌关节急性损伤动物模型定向力加力器,其特征在于,包括:
2.根据权利要求1所述的定向力加力器,其特征在于,所述机器人关节模组(8)作为动力来源采用驱动电机、减速机、编码器和电机驱动器一体结构,以实现在精准控制输出能量的同时监测实际击打能量。
3.根据权利要求1所述的定向力加力器,其特征在于,两个所述弧形保护圈(6)通过设置在靠近弧形边缘的多个连接柱(7)连接固定。
4.根据权利要求1所述的定向力加力器,其特征在于,所述支撑架(3)包括水平放置的u型托底和位于托底上的两个立柱,两个立柱之间设置有连接板,所述旋转阻尼器(4)固定在连接板上。
5.根据权利要求1所述的定向力加力器,其特征在于,每组底座(1)包括两个螺杆橡胶脚杯,每个螺杆橡胶脚杯的上方固定有一个对应的高度调节杆(2),通过旋转脚杯来调整对应一角的高度。
6.根据权利要求1至5中任一项所述的定向力加力器,其特征在于,每个所述高度调节杆(2)上均设置有支撑板,所述支撑板用于支撑上方对应的支撑架(3)。
7.根据权利要求1所述的定向力加力器,其特征在于,所述旋转阻尼器采用静态扭矩为13m.m的法兰。
8.根据权利要求1所述的定向力加力器,其特征在于,所述撞击杆(12)上与动物接触的端部设有缓冲胶垫。
9.一种使用权利要求1至8中任一项所述颞下颌关节急性损伤动物模型定向力加力器的方法,其特征在于,包括以下步骤:
技术总结本发明公开了一种颞下颌关节急性损伤动物模型定向力加力器及使用方法,定向力加力器包括:高度调节组件,包括两组呈对称设置的底座、高度调节杆和支撑架,每组高度调节杆设置在对应底座上,用于支撑上方对应支撑架;旋转调节组件,包括两个对称设置且固定连接的弧形保护圈;每个弧形保护圈通过旋转阻尼器固定在支撑架上,弧形保护圈和支撑架之间设有旋转阻尼器安装板;击打组件,设置在两个弧形保护圈之间,包括击打驱动部件和击打方向校准部件,击打驱动部件包括机器人关节模组及连接杆,机器人关节模组安装在弧形保护圈圆心位置处,连接杆另一端设置有砝码;击打方向校准部件包括固定板和撞击杆。技术研发人员:张彤,霍娜,周孙欣,李育锋受保护的技术使用者:中国人民解放军总医院第一医学中心技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/87044.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表