清洁机器人以及清洁系统的制作方法
- 国知局
- 2024-07-10 17:18:11
本技术涉及清洁设备,特别涉及一种清洁机器人以及清洁系统。
背景技术:
1、近些年来,随着社会经济的发展以及家庭生活水平的提高,家具清洁逐步进入智能化、机器化的时代,应运而生的清洁机器人因其具有自动清洁等效果而正受到越来越多家庭的欢迎,清洁机器人能够将人们从家具清洁工作中解放出来,有效减轻人们在家居清洁方面的工作负担,缓解人们在进行家具清洁过程中的劳累程度。
2、然而现有的清洁机器人的清洁件无法覆盖清洁机器人的行走轨迹,同时清洁机器人的轮子容易被地面上的污渍污染,从而导致清洁机器人对地面清洁后会存留有行走轨迹对地面造成二次污染无法被完全清理,故亟需改进。
技术实现思路
1、本实用新型的主要目的是提供一种清洁机器人,旨在使得第一清洁件有效清理行走模块行走时对地面造成的二次污染。
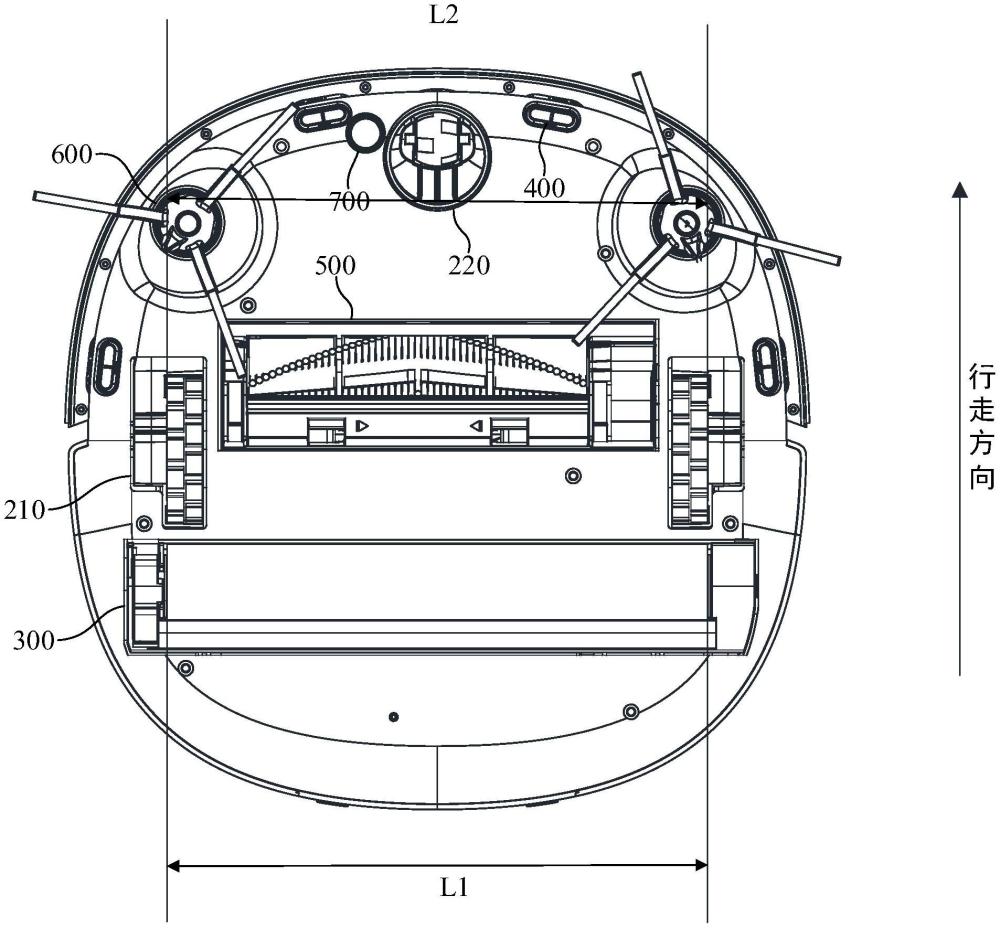
2、为实现上述目的,本实用新型提出的清洁机器人,所述清洁机器人包括本体、行走模块和第一清洁件,所述行走模块安装于所述本体的下方,所述第一清洁件安装于所述本体的下方,所述第一清洁件在所述清洁机器人的行走方向的投影宽度为l1,所述行走模块在所述清洁机器人的行走方向的投影宽度为l2,l1≥l2。
3、在本实用新型的一些实施例中,所述行走模块包括两主动轮以及从动轮,两所述主动轮在垂直所述清洁机器人的行走方向上间隔设置,所述从动轮位于两所述主动轮在所述清洁机器人的行走方向的前方,所述从动轮在垂直所述清洁机器人的行走方向上位于两所述主动轮之间。
4、在本实用新型的一些实施例中,所述清洁机器人还包括检测器,所述检测器安装于所述本体的下方,所述检测器位于所述从动轮在所述清洁机器人的行走方向的前方,所述检测器用于检测地形。
5、在本实用新型的一些实施例中,所述本体的下表面设置有安装凹槽,所述第一清洁件为绒布滚刷,所述绒布滚刷安装于所述安装凹槽内,所述绒布滚刷部分凸出所述本体的下表面。
6、在本实用新型的一些实施例中,所述清洁机器人还包括第二清洁件以及第三清洁件,所述第二清洁件安装于所述本体下方,所述第三清洁件安装于所述本体下方,所述第一清洁件、所述第二清洁件以及所述第三清洁件沿所述清洁机器人的行走方向依次排布。
7、在本实用新型的一些实施例中,所述第一清洁件、所述第二清洁件以及所述第三清洁件均可拆卸安装于所述本体。
8、在本实用新型的一些实施例中,所述第三清洁件可相对于所述本体在远离或靠近所述本体的方向活动,以使得所述第三清洁件具有工作位置以及浮空位置,所述第三清洁件位于工作位置时所述第三清洁件与地面抵接,所述第三清洁件位于浮空位置时所述第三清洁件与地面间隔设置。
9、在本实用新型的一些实施例中,所述第三清洁件的数量为两个,两个所述第三清洁件在垂直所述清洁机器人的行走方向上间隔设置,两所述第三清洁件可相对于所述本体沿相反的方向转动,以使得两所述第三清洁件将地面上的垃圾集中于两所述第三清洁件之间。
10、在本实用新型的一些实施例中,所述清洁机器人还包括超声波模块,所述超声波模块安装于所述本体的下方,所述超声波模块设于所述本体在所述清洁机器人的行走方向的前方,所述超声波模块与两所述第三清洁件间隔设置,所述超声波模块用于识别障碍物和/或检测地面是否为毛毯。
11、本实用新型还提出一种清洁系统,所述清洁系统包括清洁基站以及清洁机器人,所述清洁机器人包括本体、行走模块和清洁件,所述行走模块安装于所述本体的下方,所述第一清洁件安装于所述本体的下方,所述第一清洁件在所述清洁机器人的行走方向的投影宽度为l1,所述行走模块在所述清洁机器人的行走方向的投影宽度为l2,l1≥l2。
12、本实用新型技术方案通过采用将第一清洁件在清洁机器人的行走方向的投影宽度大于行走模块在清洁机器人的行走方向的投影宽度。如此设置,该清洁机器人在对地面清扫时行走模块的行走轨迹会被第一清洁件所清理,从而使得第一清洁件有效清理行走模块行走时对地面造成的二次污染。
技术特征:1.一种清洁机器人,其特征在于,所述清洁机器人包括本体、行走模块和第一清洁件;其中,所述行走模块安装于所述本体的下方,所述第一清洁件安装于所述本体的下方,所述第一清洁件在所述清洁机器人的行走方向的投影宽度为l1,所述行走模块在所述清洁机器人的行走方向的投影宽度为l2,l1≥l2。
2.如权利要求1所述的清洁机器人,其特征在于,所述行走模块包括两主动轮以及从动轮,两所述主动轮在垂直所述清洁机器人的行走方向上间隔设置,所述从动轮位于两所述主动轮在所述清洁机器人的行走方向的前方,所述从动轮在垂直所述清洁机器人的行走方向上位于两所述主动轮之间。
3.如权利要求2所述的清洁机器人,其特征在于,所述清洁机器人还包括检测器,所述检测器安装于所述本体的下方,所述检测器位于所述从动轮在所述清洁机器人的行走方向的前方,所述检测器用于检测地形。
4.如权利要求1所述的清洁机器人,其特征在于,所述本体的下表面设置有安装凹槽,所述第一清洁件为绒布滚刷,所述绒布滚刷安装于所述安装凹槽内,所述绒布滚刷部分凸出所述本体的下表面。
5.如权利要求1所述的清洁机器人,其特征在于,所述清洁机器人还包括第二清洁件以及第三清洁件,所述第二清洁件安装于所述本体下方,所述第三清洁件安装于所述本体下方,所述第一清洁件、所述第二清洁件以及所述第三清洁件沿所述清洁机器人的行走方向依次排布。
6.如权利要求5所述的清洁机器人,其特征在于,所述第一清洁件、所述第二清洁件以及所述第三清洁件均可拆卸安装于所述本体。
7.如权利要求5所述的清洁机器人,其特征在于,所述第三清洁件可相对于所述本体在远离或靠近所述本体的方向活动,以使得所述第三清洁件具有工作位置以及浮空位置,所述第三清洁件位于工作位置时所述第三清洁件与地面抵接,所述第三清洁件位于浮空位置时所述第三清洁件与地面间隔设置。
8.如权利要求5所述的清洁机器人,其特征在于,所述第三清洁件的数量为两个,两个所述第三清洁件在垂直所述清洁机器人的行走方向上间隔设置,两所述第三清洁件可相对于所述本体沿相反的方向转动,以使得两所述第三清洁件将地面上的垃圾集中于两所述第三清洁件之间。
9.如权利要求8所述的清洁机器人,其特征在于,所述清洁机器人还包括超声波模块,所述超声波模块安装于所述本体的下方,所述超声波模块设于所述本体在所述清洁机器人的行走方向的前方,所述超声波模块与两所述第三清洁件间隔设置,所述超声波模块用于识别障碍物和/或检测地面是否为毛毯。
10.一种清洁系统,其特征在于,所述清洁系统包括清洁基站以及如权利要求1至9任意一项所述的清洁机器人。
技术总结本技术公开一种清洁机器人以及清洁系统,其中,该清洁机器人包括本体、行走模块和第一清洁件;该行走模块安装于本体的下方,该第一清洁件安装于本体的下方,该第一清洁件在清洁机器人的行走方向的投影宽度为L1,该行走模块在清洁机器人的行走方向的投影宽度为L2,L1≥L2。如此设置,该清洁机器人在对地面清扫时行走模块的行走轨迹会被第一清洁件所清理,从而使得第一清洁件有效清理行走模块行走时对地面造成的二次污染。技术研发人员:邓显舜,胡萧,叶力荣受保护的技术使用者:深圳银星智能集团股份有限公司技术研发日:20230905技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240615/62471.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表