泳池清洁机器人的制作方法
- 国知局
- 2024-07-10 18:15:01
本发明涉及泳池清洁设备领域,具体地,涉及一种泳池清洁机器人。
背景技术:
1、泳池是人们从事进行游泳的场地。泳池在使用中不可避免地会出现一些杂物,例如,头发、杂草、树叶、小石头。泳池清洁机器人可以通过其上的清洁件对泳池进行清洁。
2、现有的泳池清洁机器人通常包括电机、传动组件、驱动轮和清洁组件。驱动轮和清洁组件均通过传动组件传动连接至电机的驱动轴。泳池清洁机器人工作时,电机通过传动组件带动驱动轮转动,进而带动泳池清洁机器人前进、后退或转弯。同时,传动组件还需要将电机的驱动力传递至清洁组件,这样泳池清洁机器人在移动过程中清洁组件可以对泳池进行清洁。
3、由于电机需要带动驱动轮和清洁组件同时工作,因此传动组件的结构比较复杂,零部件较多,机器人工作过程中,泳池底部的杂物很可能会卷入传动组件中,由此加大了传动组件发生故障的概率。再者,零部件数量较多还会导致组装工序增多、加工成本增高。
技术实现思路
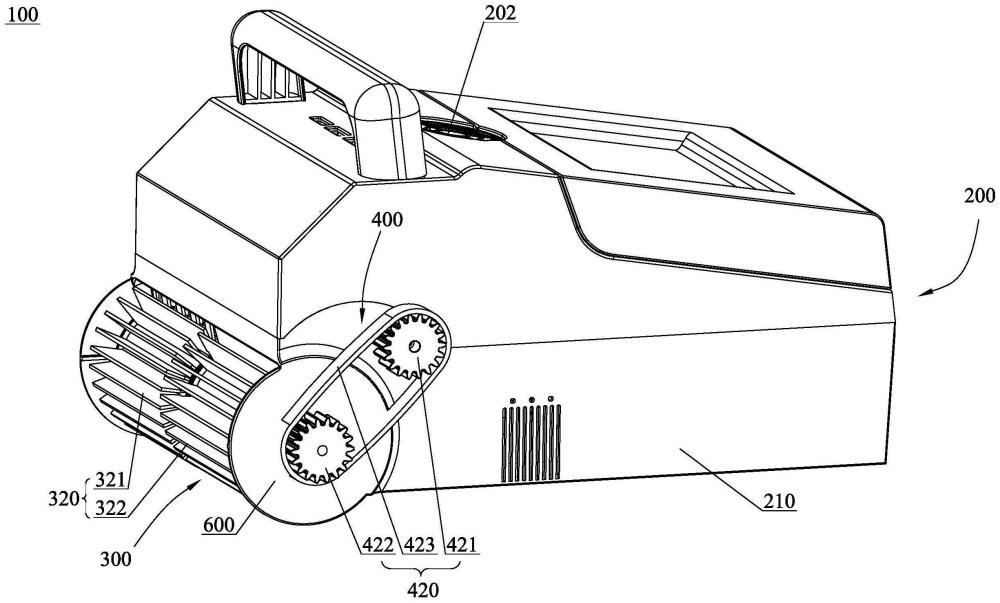
1、根据本发明的一个方面,提供一种泳池清洁机器人。泳池清洁机器人包括主体、清洁行走机构和行走驱动机构,清洁行走机构包括滚筒和清洁件,滚筒绕左右延伸的第一轴线可旋转地设置在主体的前部,清洁件设置在滚筒的表面上,主体的后部设置有被动轮,行走驱动机构包括行走电机和行走传动组件,行走电机设置在主体上,行走传动组件传动连接在行走电机的驱动轴和滚筒之间,滚筒在行走电机的驱动下可转动,以带动主体行走。
2、本技术的泳池清洁机器人通过将清洁件设置在行走用的滚筒上,滚动带动泳池清洁机器人行走的同时,其上的清洁件就能够同步进行清洁,通过将行走与清洁功能集成在相同的机构,可以简化泳池清洁机器人的结构。而且,清洁件固定在滚筒上且与滚筒同轴旋转,可以明显地减少行走传动组件的传动级数,使得传动结构更加简单,该结构降低了传动过程发生故障的概率,降低了生产制造和维护泳池清洁机器人的成本,实现了降本增效。
3、示例性地,行走传动组件包括与行走电机的驱动轴同轴连接的第一齿轮、与滚筒同轴连接的第二齿轮、以及套设在第一齿轮和第二齿轮上的传动带。如此设置,通过齿轮和传动带的两级传动使得行走传动组件的结构更加简单;而且,传动带可以使运转更加平稳,无噪声。同时,该结构还能够方便调节行走电机的驱动轴与滚筒的轴线之间的距离,使得泳池清洁机器人上的位于行走驱动机构和清洁行走机构周围的零部件在主体上所设置的位置更加灵活化。
4、示例性地,主体包括壳体,一对安装部分别设置在壳体的前面两侧,滚筒绕第一轴线可旋转地连接在一对安装部之间,第二齿轮位于一对安装部的外侧,行走电机设置在壳体内,第一齿轮在壳体之外与行走电机的驱动轴连接。如此,传动带在壳体和一对安装部的外侧与第一齿轮和第二齿轮连接。将第一齿轮设置在壳体之外且将第二齿轮设置在安装部外部,在维修或保养行走传动组件时无需打开壳体,使得行走传动组件的拆装维护更加方便。
5、示例性地,主体还包括盖板,盖板连接至壳体的外侧面上,行走传动组件位于盖板和壳体之间。如此设置,盖板可以在一定程度上对行走传动组件进行防护,避免行走传动组件在行进途中磕碰到池壁或者其他外物,降低了行走传动组件损坏的风险。而且,盖板可以遮挡行走传动组件,进一步使得泳池清洁机器人的外形更加美观,提升了用户的体验感。
6、示例性地,行走电机的驱动轴为一对,一对驱动轴沿平行于第一轴线的第二轴线且朝向相反的方向延伸至主体的两侧,行走传动组件为两组且分别位于主体的两侧,一对驱动轴分别通过对应侧的行走传动组件与滚筒传动连接。如此设置,一个行走电机可以通过两组行走传动组件,在滚筒的两侧同步带动其运转,使得滚筒的行走更加平衡;而且,在一个行走电机上设置一对轴带动两组行走传动组件运行,相较于通过两个行走电机分别带动一组行走传动组件运行的设置,可以节省行走电机的数量,降低了泳池清洁机器人的制造成本,驱动更加高效。
7、示例性地,滚筒包括:轴杆,轴杆沿第一轴线延伸,轴杆的两端固定在主体上;轴套,轴套套设在轴杆上且绕轴杆可旋转,清洁件设置在轴套的表面上;以及一对端帽,一对端帽分别扣盖在轴套的两端,且将清洁件限位在一对端帽之间,行走传动组件连接至一对端帽中的一个或两个。如此,通过设置轴套、轴杆和端帽,滚筒的结构比较简单,借助此结构可以轻松地实现滚筒绕第一轴线旋转;而且,端帽还可以对轴套起到保护作用,行走传动组件可以直接连接至端帽上,避免在轴套上进行加工改造以使其与行走传动组件连接,节省了改造成本,也能延长轴套的使用寿命。而端帽的结构相对于轴套小,加工制造较方便,即使端帽发生损坏,更换或者加工新的端帽也比轴套容易,便于维护。
8、示例性地,轴套包括沿第一轴线依次设置的第一轴套和第二轴套,第一轴套具有与第二轴套相邻的第一端和与一对端帽中的一个连接的第二端,第二轴套具有与第一轴套相邻的第三端和与一对端帽中的另一个连接的第四端,一对端帽中的每个内都设置有轴承,一对端帽中的每个都通过轴承连接至轴杆。如此设置,轴套与轴杆安装更加方便,尤其在轴杆较长的情况下,效果更加显著;再者,即使第一轴套或者第二轴套发生磨损,仅需更换对应的轴套即可,无需全部更换,降低了维修成本;再者,轴承可以将端帽支撑在轴杆上,降低了端帽绕轴杆的转动摩擦力,减少端帽的磨损,使得滚筒可以长期稳定可靠地运行。
9、示例性地,清洁件包括可拆卸地绕设在第一轴套上的第一清洁件和可拆卸地绕设在第二轴套上的第二清洁件。将清洁件分成两段分别绕设在对应的轴套上,可以使得第一清洁件和第二清洁件的安装更加轻松,更换更加便捷。
10、示例性地,主体包括壳体,壳体具有位于底部的进水口、位于顶部的出水口以及连通在进水口和出水口之间的过滤通道,泳池清洁机器人还包括设置在壳体内的过滤机构,过滤机构包括过滤件和水泵电机,过滤件位于过滤通道上,水泵电机用于驱动过滤通道内的水流动,出水口向后倾斜。如此设置,泳池清洁机器人在前进和清扫过程中,清洁件会将杂物向后清扫至主体的底部,这样,设置在底部的进水口更利于将混有杂物的污水吸入进水口,进而进入过滤通道,污水在过滤通道内被过滤件过滤,过滤出的杂物被汇集在过滤机构内,进而使得杂物被过滤机构过滤收集。过滤后的净水从倾斜的出水口向后喷射,由此产生的反冲作用为泳池清洁机器人向前行走提供了助力。由此可以减小行走驱动机构的功率。而且,在泳池清洁机器人清理池壁时,喷射出的净水产生的反冲作用会产生向上和朝向池壁的分力,向上的分力可以对抗泳池清洁机器人的自重,而朝向池壁的分力可以将泳池清洁机器人压紧在池壁上,进而有利于泳池清洁机器人爬壁。
11、示例性地,出水口与水平方向的夹角在45度到75度之间。例如,夹角α可以为45度、50度、55度、60度、65度、70度、75度等,或者可以其它们之间的任意值。如此设置,泳池清洁机器人爬壁效果更好。
12、示例性地,水泵电机的驱动轴的延伸方向与出水口的延伸方向一致。如此设置,可以提高水泵电机的工作效率,池水从出水口喷射出来的速度可以更快,进而可以更好地辅助行走和爬壁。
13、示例性地,行走电机和水泵电机都设置在密封罩内,密封罩容纳在主体内,密封罩内还设置有电源,电源连接至行走电机和水泵电机,以为行走电机和水泵电机供电。如此设置,密封罩可以保护行走电机、水泵电机和电池不受磕碰以及被池水浸入,提高了泳池清洁机器人的安全性能。
14、示例性地,主体的前部设置有前轮。如此设置,可以避免滚筒下方的清洁件被压紧在池底上而影响清洁效果。并且,可以在一定程度上降低了清洁件的磨损程度,减少更换清洁件的频率。
15、示例性地,被动轮为万向轮。如此设置,被动轮可以进行360°旋转,当主体的前部在驱动力的作用下前移或者后退甚至拐弯时,主体的后部可以更加灵活与前部同步前进、后退或者转弯。
16、在技术实现要素:中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
17、以下结合附图,详细说明本发明的优点和特征。
本文地址:https://www.jishuxx.com/zhuanli/20240615/67029.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表