用于确定具有移动元件的驱动机构的配置的方法、移动元件和系统与流程
- 国知局
- 2024-07-11 14:37:13
本发明涉及一种利用传感器装置确定驱动机构的配置的方法,该驱动机构具有用于驱动织机的综框的移动元件。本发明还涉及一种用于驱动织机的综框的驱动机构的移动元件,以及一种包括移动元件和传感器装置的系统。
背景技术:
1、已知不同类型的驱动机构用于驱动织机的综框上下移动综框,例如如us5273079中所示的凸轮机构,如wo2004081113a1中所示的多臂机构、偏心机构,或者如ep3341509a1中所示的其中每个综框由独立于织机的单独驱动电机驱动的机构。
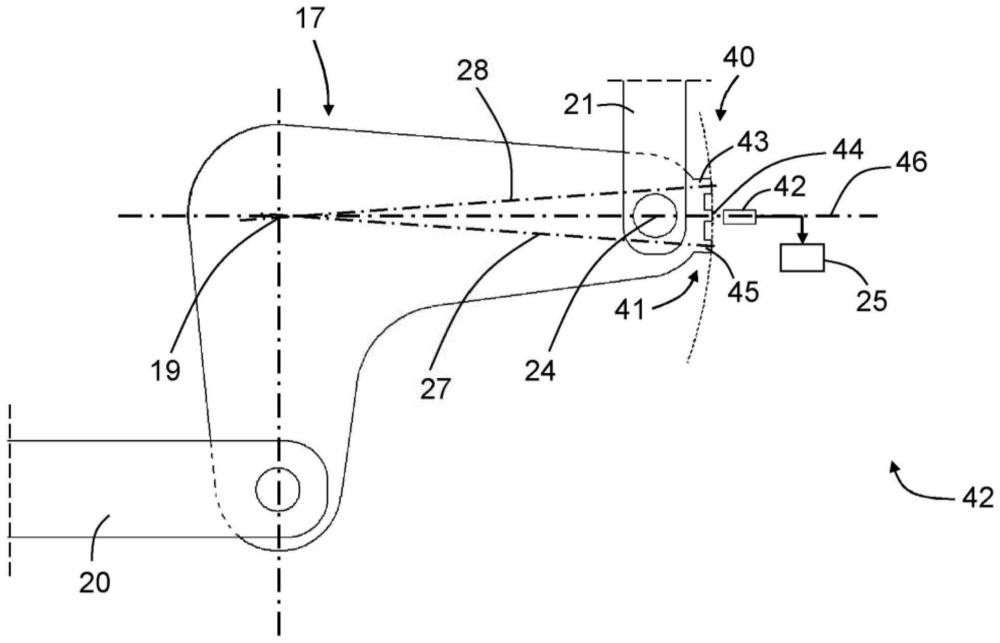
2、更特别地,ep3341509a1示出了驱动机构,该驱动机构包括绕曲柄轴线旋转的曲柄、联接杆、以及具有第一臂和第二臂的杠杆,其中杠杆可绕旋转轴线在上位置和下位置之间往复旋转,并且其中联接杆通过第一铰接接头被联结到曲柄,该第一铰接接头偏心于曲柄轴线,其中联接杆通过第二铰接接头被联结到杠杆的第一臂,并且其中第二铰接接头的位置相对于杠杆的第一臂是可调节的,用于调节由驱动机构移动的综框的行程。ep3341509a1进一步示出了一种传感器装置,该传感器装置包括布置在杠杆上的具有第一目标和第二目标的目标组,以及固定布置在织机上处于测量位置的检测器,其中目标组的目标具有不同的特性,用于当从上位置接近测量位置时或当从测量位置离开朝向上位置移动时产生第一信号以及用于当从下位置接近测量位置时或当从测量位置离开朝向下位置移动时产生第二信号,其中第二信号不同于第一信号。根据ep3341509a1,对于不同的行程,移动轮廓或移动过程是预先已知的。因此,可以基于第一信号、第二信号和已知的移动轮廓来确定行程。
技术实现思路
1、本发明的目的是提供一种利用传感器装置确定驱动机构的配置的方法,该驱动机构具有用于驱动织机的综框的移动元件,该驱动机构需要较少或甚至不需要移动轮廓的预先信息。本发明的另外的目的是提供一种允许这种确定的用于驱动织机的综框的驱动机构的移动元件,以及一种包括移动元件和传感器装置的系统。
2、根据第一方面,提供了一种利用传感器装置确定驱动机构的配置的方法,该驱动机构具有用于驱动织机的综框的移动元件,其中传感器装置包括设置在驱动机构的移动元件上的目标组,该目标组具有上目标、中间目标和下目标,其中中间目标布置在上目标和下目标之间,并且传感器装置包括传感器元件,该传感器元件固定布置在织机上并且被配置用于检测目标组中的目标在感测范围内的存在。该方法包括:操作驱动机构以移动移动元件,使得目标组经过传感器元件;用传感器元件检测上目标、中间目标和下目标在感测范围内的存在;在检测到上目标时确定纺织循环中的上目标检测力矩,在检测到中间目标时确定纺织循环中的中间目标检测力矩,和在检测到下目标时确定纺织循环中的下目标检测力矩;以及基于上目标检测力矩、中间目标检测力矩和下目标检测力矩确定驱动机构的配置。
3、遍及本技术,不定冠词“一”或“一个”意味着“一个或多个”。特别地,驱动机构可以包括多于一个的移动元件,其中每个移动元件被配置用于驱动一个综框。提及“第一元件”不强制要求存在“第二元件”。此外,表述“第一”和“第二”仅用于将一个元件与另一个元件区分开来,并且不指示这些元件的任何顺序。
4、尽管在本技术中,术语“上”和“下”与由驱动机构驱动的综框的移动相一致,但是该方法也可以用于从左向右移动的移动元件,其中取决于移动元件的移动方向,设置在移动元件上的目标从左和从右接近传感器元件。
5、在下文中,表述确定的目标检测力矩将用于指代确定的上目标检测力矩、确定的下目标检测力矩和确定的中间目标检测力矩中的一个、几个或全部。
6、在本技术的上下文中,纺织循环中的力矩被定义为相对于织机角度的力矩,例如其中移动元件到达或处于相对于织机角度的特定位置的力矩。
7、在本技术的上下文中,驱动机构的配置被定义为与驱动机构的移动轮廓的至少一个可设置配置参数相关联的配置或设置,所述至少一个可设置配置参数选自包括行程、过零力矩、交叉力矩、移动轮廓类型和/或结合图案的组。换句话说,通过确定驱动机构的配置,确定行程、过零力矩、交叉力矩、移动轮廓类型和/或结合图案中的至少一个,从而允许确定移动轮廓,即移动元件的移动路径或曲线。
8、在本技术的上下文中,行程(也称为行程长度)是移动元件在两个极限位置(也称为反转点)之间行进的距离,通常是在上极限位置和下极限位置之间行进的距离。移动元件的行程与由移动元件驱动的综框的行程相同或成比例。移动元件的行进距离的中间位置(到两个极限位置具有相同的距离)称为零位置。过零力矩被定义为在纺织循环中移动元件在向上和向下移动期间通过零位置的力矩。
9、在织机中,取决于驱动机构和/或驱动机构的配置,移动元件以及因此由移动元件驱动的综框的所谓对称移动和不对称移动是可能的,它们在本技术的上下文中称为移动轮廓类型。当使用不对称移动时,通常下层经纱的移动轮廓不同于上层经纱的移动轮廓。
10、交叉力矩被定义为在纺织循环中当从一个极限位置移动到另一个极限位置时移动元件处于移动元件应该交叉自身的位置的力矩。交叉力矩可能不同于过零力矩,特别是对于不对称移动轮廓类型。移动元件在交叉力矩的位置被称为交叉位置。零位置和交叉位置之间的距离称为交叉高度。
11、结合图案或纺织图案被定义为纬纱和经纱交织的图案。取决于结合图案的不同,并非所有综框都在每个纺织循环中从一个极限位置移动到另一个极限位置。
12、驱动机构的结构可以设置成使驱动机构的移动元件的移动轮廓以及因此由移动元件驱动的综框适应不同的纺织条件和/或纺织图案。特别地,取决于驱动机构,该配置可以被设置成改变一个或多个配置参数,这一个或多个配置参数例如选自包括行程、过零力矩、交叉力矩、交叉高度、移动轮廓类型和/或结合图案的组。
13、根据本发明,提供了一种方法,该方法允许通过使用具有三个目标(即上目标、中间目标和下目标)的目标组观察移动元件的移动来确定驱动机构的配置,不需要或至少只需要很少的关于任何配置参数的预先信息,使得在实施例中可以确定驱动机构的配置,而不必需由织机的用户或操作者在织机的控制装置中进行任何输入。
14、在该方法的实施例中确定的配置存储在织机的控制装置中。因此,所确定的配置可以用于织机的后续操作和/或用于驱动机构的设置,以将驱动机构设置成期望的配置。在一个实施例中,所确定的配置用于优化织机的转速和/或用于针对织机的设定转速优化织机的插入参数。
15、在一个实施例中,传感器元件是霍尔传感器,其中目标是设置在移动元件处的磁体,特别是设置在移动元件的侧端处的磁体,其中该方法包括当将磁体移进或移出感测范围时用传感器元件检测磁体。在替代实施例中,目标是设置在移动元件处的独立元件,例如诸如固定或胶合到移动元件的块的元件,特别是在移动元件的一侧固定到移动元件的元件。固定或胶合可以对每个块单独进行或经由几个块的组件进行。
16、在其他实施例中,传感器元件是接近传感器,其中目标是设置在移动元件处的突起,特别是设置在移动元件的侧端处的突起,该突起由凹口隔开,其中该方法包括当将目标移动到感测范围内时用传感器元件检测目标的上升沿。这允许目标与移动元件一体制造。除了上升沿之外或替代于上升沿,在一个实施例中,还检测并处理下降沿以确定驱动机构的配置。
17、在一个实施例中,驱动机构在纺织方向上操作以来回移动移动元件,使得目标组从下方和从上方经过传感器元件,其中用于确定驱动机构的配置的方法包括当目标从下方和从上方经过传感器元件时检测感测范围内目标的存在;以及确定目标检测力矩,该目标检测力矩包括当从下方经过传感器元件时在检测到上目标时在纺织循环中的第一上目标检测力矩、当从上方经过传感器元件时在检测到上目标时在纺织循环中的第二上目标检测力矩、当从下方经过传感器元件时在检测到中间目标时在纺织循环中的第一中间目标检测力矩、当从上方经过传感器元件时在检测到中间目标时的纺织循环中的第二中间目标检测力矩、当从下方经过传感器元件时在检测到下目标时的纺织循环中的第一下目标检测力矩、以及当从上方经过传感器元件时在检测到下目标时的纺织循环中的第二下目标检测力矩。
18、在本技术的上下文中,纺织方向被定义为在织机正常操作中使用的移动方向。当在纺织方向上操作驱动机构时,移动元件在一个、两个或几个纺织循环内来回移动,以上下移动从动综框。根据本技术,驱动机构操作足够的时间,使得目标组中的每个目标从上方和从下方经过传感器元件至少一次,其中——使用三个目标——识别六个目标检测力矩,例如使用上升沿,这可以用于驱动机构配置的后续确定。
19、根据以上所述,尽管在本技术和权利要求中,表述“从下方”和“从上方”与由驱动机构驱动的综框的移动相一致地使用,但是该方法也可以用于从左向右移动的移动元件,其中取决于移动元件的移动方向,设置在移动元件上的目标从左侧和从右侧接近传感器元件。
20、在一个实施例中,驱动机构沿相反方向操作以来回移动移动元件,使得目标组从下方和从上方经过传感器元件,其中用于确定驱动机构的配置的方法还包括:当目标从下方和从上方经过传感器元件时检测感测范围内目标的存在;以及确定目标检测力矩,该目标检测力矩包括当从下方经过传感器元件时在检测到上目标时在纺织循环中的第三上目标检测力矩、当从上方经过传感器元件时在检测到上目标时在纺织循环中的第四上目标检测力矩、当从下方经过传感器元件时在检测到中间目标时在纺织循环中的第三中间目标检测力矩、当从上方经过传感器元件时在检测到中间目标时的纺织循环中的第四中间目标检测力矩、当从下方经过传感器元件时在检测到下目标时的纺织循环中的第三下目标检测力矩、以及当从上方经过传感器元件时在检测到下目标时的纺织循环中的第四下目标检测力矩。
21、在本技术的上下文中,反方向被定义为与纺织方向相反的方向。当在纺织方向和相反方向上操作驱动机构足够的时间,使得目标组中的每个目标从上方通过传感器元件两次并从下方通过传感器元件两次时,例如使用上升沿来识别十二个目标检测力矩,这可以用于驱动机构的配置的后续确定。
22、在一个实施例中,确定驱动机构的配置包括基于两个确定的中间目标检测力矩来确定当移动元件处于零位置时纺织循环中的过零力矩,所述确定的中间目标检测力矩已经在从上方和从下方经过传感器元件时在检测到中间目标时确定,其中特别地,当移动元件处于零位置时中间目标相对于零位置线对称布置,并且传感器元件布置在零位置线的高度处。
23、如上所述,零位置是移动元件行程或行进距离的中间位置。为了确定零位置,确定中间目标的中点处于传感器元件的高度时的力矩,其中在实施例中,传感器被布置在零位置线的高度处,并且中间目标被布置成使得中点处于零位置中的零位置线处。取决于实施例,确定两个中间目标检测力矩,即第一和第二中间目标检测力矩或第三和第四中间目标检测力矩,或者确定所有四个中间目标检测力矩。为了确定中间目标的中点处于传感器元件的高度时的力矩,使用这些确定的中间目标检测力矩中的两个,特别是第一和第二中间目标检测力矩或第一和第四中间目标检测力矩、第三和第四中间目标检测力矩或第三和第二中间目标检测力矩。换句话说,当中间目标被传感器元件检测到时,当中间目标从两个相反方向移动经过传感器元件时,力矩用于确定当中间目标的中点处于传感器元件的高度时的力矩。当然,也可想到使用多于两个确定的中间目标检测力矩的实施例。
24、在一个实施例中,确定驱动机构的配置还包括确定移动轮廓类型,其中预先存储关于不同移动轮廓类型的信息,并且基于所确定的过零力矩来确定移动轮廓类型。
25、移动轮廓类型可以包括对称类型和不对称类型。在实施例中,考虑不同的对称类型和/或不对称类型。该方法利用了不同移动轮廓类型在过零力矩中不同的特性。因此,使用所确定的过零力矩和预先存储的关于可能的移动轮廓类型的信息,可以确定移动轮廓类型,而不必需来自用户或操作者的任何输入。
26、在一个实施例中,确定驱动机构的配置包括确定交叉力矩,其中当移动元件处于其反转点之一时,基于所确定的目标检测力矩来确定纺织循环中的反转点力矩,并且基于反转点力矩来定义交叉力矩。
27、如上所述,交叉力矩是在纺织循环中当从上位置移动到下位置或从下位置移动到上位置时移动元件处于移动元件应该交叉自身的位置的力矩。在一个实施例中,反转点力矩使用在沿纺织方向驱动驱动机构时为目标组中的一个目标确定的选定的第一确定目标检测力矩和在沿相反方向驱动驱动机构时为目标组中的所述一个目标确定的选定的第二确定目标检测力矩来定义,其中反转点力矩是选定的第一确定目标检测力矩和选定的第二确定目标检测力矩之间的中点。在其他实施例中,使用多于两个确定的目标检测力矩来允许补偿测量不准确性。
28、在一个实施例中,确定驱动机构的配置包括基于移动轮廓类型确定在交叉力矩相对于零位置的交叉高度。在一个实施例中,基于过零力矩来确定移动轮廓类型,该过零力矩基于所确定的中间目标检测力矩来确定。在其他实施例中,移动轮廓类型是预先已知的或者由用户或操作者输入的。
29、在一个实施例中,确定驱动机构的配置还包括确定综框的行程,其中该行程经由基于上目标检测力矩和下目标检测力矩的第一种方式确定,并且其中该行程经由另一种方式确定,该另一种方式选自包括以下的组:基于上目标检测力矩和中间目标检测力矩的第二种方式,基于中间目标检测力矩和下目标检测力矩的第三种方式,基于上目标和中间目标以及中间目标和下目标之间的距离(特别是凹口)的第四种方式。
30、如ep3341509a1中所述,两个确定的目标检测力矩之间的角度差可以用于确定移动元件的行程,并且从而确定由移动元件驱动的综框的行程。为此目的,在一个实施例中,对于第一种方式,确定上目标和下目标的中点经过传感器元件的移动之间的角距离。对于所述另一种方式,在实施例中,使用中间目标的中点移动经过传感器元件时的力矩。根据第四种方式,目标之间的距离的中点(特别是突起形式的目标之间的凹口的中点)用于确定行程。
31、在一个实施例中,使用从多个预先存储的移动轮廓类型中选择的假定移动轮廓类型来确定行程。在关于移动轮廓类型的预先信息可用的情况下,使用如ep3341509a1中所描述的两个目标检测力矩来确定行程是可能的。本发明允许在没有移动轮廓类型的这种预先信息的情况下确定行程。为此目的,假设该配置具有从多个可能的移动轮廓类型中选择的假定移动轮廓类型,接下来使用假定移动轮廓以至少两种不同的方式确定行程。在使用两种不同的方式来确定极限内的相同行程的情况下,推断出假定的移动轮廓类型是实际的移动轮廓类型,并且确定的行程是实际的行程。如果以两种不同方式确定的行程不同,则推断出假定的移动轮廓类型不是实际的移动轮廓类型。因此,从多个可能的移动轮廓类型中选择替代的移动轮廓类型,并且重复该确定。以此方式,可以在没有关于实际移动轮廓类型的预先信息的情况下确定行程和移动轮廓类型。
32、在一个实施例中,上目标和中间目标之间的距离不同于中间目标和下目标之间的距离,其中该方法包括基于当检测目标组的第一目标时的第一力矩和当检测目标组的第二目标时的第二力矩之间的第一角距离以及当检测目标组的第二目标时的第二力矩和当检测目标组的第三目标时的第三力矩之间的第二角距离来确定移动元件的移动方向。
33、在一个实施例中,确定驱动机构的配置包括确定结合图案,其中驱动机构在多个纺织循环内操作以来回移动移动元件。
34、在一个实施例中,为了确定结合图案,基于确定的目标检测力矩来确定移动元件何时被移动以驱动综框进入第一极限位置以及综框在第一极限位置中保持多少纺织循环,以及移动元件何时被移动以驱动综框进入第二极限位置以及综框在第二极限位置中保持多少纺织循环。在一个实施例中,对于这种确定,使用综框的确定的移动方向。纺织循环数是基于可能的结合图案的最大纺织循环数来确定的。在一个实施例中,例如对于凸轮机构,其中结合图案的纺织循环数可以是四个、五个或六个纺织循环,因此其中结合图案的最大纺织循环数是六个纺织循环,当目标组经过传感器元件十一次时可以确定该配置。
35、在一个实施例中,提供了一种高度检测器,其包括设置在由移动元件驱动的综框上的高度检测器目标和高度检测器传感器元件,其中检测综框的高度检测器通过力矩,即高度检测器目标通过高度检测器传感器元件的力矩,并且基于高度检测器通过力矩和驱动机构的配置来确定综框的高度位置,特别是使用上述方法确定的驱动机构的配置,特别是使用从多个预先存储的移动轮廓类型中选择的假定移动轮廓类型。由移动元件驱动的综框可以在不同的高度联接到移动元件,其中在本技术的上下文中,综框相对于驱动机构的相对位置被称为综框的高度位置。
36、根据第二方面,提供了一种用于驱动织机的综框的驱动机构的移动元件,该移动元件包括具有上目标和下目标的目标组,其中该目标组还包括中间目标,其中该中间目标布置在上目标和下目标之间,其中特别地,该目标是设置在移动元件处的突起,特别是设置在移动元件的侧端处的突起,该突起由凹口隔开。优选实施例中的移动元件是杠杆,特别是布置在驱动机构的非驱动侧的杠杆。在一个实施例中,具有突起的杠杆通过冲压制造。在实施例中,根据本发明的杠杆取代了现有驱动机构的杠杆,以允许实施本发明的方法。
37、根据第三方面,提供了一种系统,该系统包括控制装置、用于驱动织机的综框的驱动机构和传感器装置,该驱动机构具有移动元件,该传感器装置具有设置在移动元件上的目标组和可固定安装在织机上并被配置用于检测目标组的目标在感测范围内的存在的传感器元件,其中目标组包括上目标、中间目标和下目标,其中中间目标布置在上目标和下目标之间,其中驱动机构被配置成被操作以移动移动元件,使得目标组经过传感器元件,其中控制装置被配置成在检测到上目标时确定纺织循环中的上目标检测力矩、在检测到中间目标时确定纺织循环中的中间目标检测力矩、以及在检测到下目标时确定纺织循环中的下目标检测力矩,并且其中控制装置被配置用于基于上目标检测力矩、中间目标检测力矩和下目标检测力矩来确定驱动机构的配置。
38、使用具有三个目标的目标组的系统允许在没有关于某些配置参数(例如移动轮廓类型)的预先信息的情况下确定驱动机构的配置。当然,在至少一些配置参数预先已知的情况下和/或检查织机控制单元中存在或输入的配置参数是否正确时,也可以使用该系统。
39、在一个实施例中,传感器元件是接近传感器,其中目标是设置在移动元件处的突起,特别是设置在移动元件的侧端处的突起,该突起由凹口隔开,其中传感器装置被配置成在将目标移动到感测范围内时利用传感器元件检测目标的上升沿。
40、在一个实施例中,该系统具有高度检测器,该高度检测器被配置用于检测综框的高度检测器通过力矩,并基于高度检测器通过力矩和驱动机构的确定配置来确定综框的高度位置,特别是使用从多个预先存储的移动轮廓类型中选择的假定移动轮廓类型,其中特别地,高度检测器包括高度检测器传感器元件和设置在由驱动机构的移动元件驱动的综框上的高度检测器目标。
41、检测综框的高度检测器通过力矩和基于高度检测器通过力矩确定综框的高度位置不一定需要使用根据权利要求1的具有三个目标的传感器装置来确定驱动机构的配置。在一个有利的修改中,综框的高度位置是基于检测到的高度检测器通过力矩和驱动综框的驱动机构的已知配置来确定的,特别是基于已知的移动轮廓、已知的过零线和/或已知的过零力矩来确定的。在另一个有利的修改中,基于检测到的高度检测器通过力矩和驱动综框的驱动机构的确定配置来确定综框的高度位置,特别是所确定的移动轮廓、所确定的过零线和/或所确定的过零力矩,其中在一个实施例中,使用仅具有一个目标或仅具有两个目标或具有多于三个目标的传感器装置来确定配置。
本文地址:https://www.jishuxx.com/zhuanli/20240615/69450.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表