虚拟现实鞋类移动系统的制作方法
- 国知局
- 2024-07-11 16:35:25
本发明涉及虚拟现实(vr)鞋类,即,这样的鞋样装置,其抵消穿着vr鞋类的人的行走运动,从而允许穿着者在vr环境中四处移动,同时穿着者实际上保持在相同的物理或现实位置,或者在预定区域内。
背景技术:
1、vr系统(有时称为增强现实系统)通常使用诸如护目镜、包括显示器的头盔、装有传感器的手套、屏幕、声音系统等的装置来生成三维虚拟环境。该装置包含传感器、数据处理器和通信装置,以与外部计算装置通信,该外部计算装置跟踪由该装置进行的移动和对该装置进行的输入,处理该数据以在vr环境中进行适当的改变,并将相关联的数据输出到该装置,使得该装置可以适当地响应(例如,在护目镜中显示改变的视图,或者传递要由用户感觉到的触觉响应或要由用户听到的声音)。当用户沉浸在vr环境中时,各种装置允许与该环境和该环境内的虚拟物体的交互,并且允许佩戴者在虚拟环境中四处移动。vr系统存在于物理或现实世界中,因此具有物理边界和/或物理物体和特征,如果虚拟环境中的移动使佩戴者与物理边界、物体或特征接触,则这些物理边界和/或物理物体和特征会限制和/或阻碍用户的移动。佩戴显示vr环境的护目镜的人通常看不见物理环境,因此存在这样的风险,如果人在地面上的真实运动被传送到系统以便在虚拟环境中复制该运动,则人可能被真实世界中的物体绊倒或撞到真实世界中的物体。
2、因此,vr鞋类已经被开发,其抵消穿着vr鞋类的人在地面上的行走或其它运动,从而使穿着者能够保持在一个安全地点或安全区域内,同时在vr游戏或其它体验期间享受vr环境中的明显运动。在us2018/0326286中公开了一种这样的设备;美国匹兹堡的私人公司ekto vr设计了另一设备(参见www.ektovr.com)。这两种设备都从例如us2014/0262576或us6059062中的“动力旱冰鞋”的概念出发,其中动力鞋类用于运送穿着该鞋类的人,并且基本上反向地将该概念应用于vr环境。鞋类中的位置传感器、陀螺仪、处理器和计算装置以及通信装置与vr系统的外部计算装置和动力旱冰鞋的运动特征(马达、轮、带等)结合来工作,以感测穿着鞋类的人的机械行走动作并抵消或消除该机械行走动作,使得尽管人执行行走、跑步、跳跃等的真实动作,但这些动作被致使无效,并且人保持在相同的物理位置或区域。因此,这些系统中的这种鞋类的穿着者将花费体力,就像在运动一样,同时系统所采集的将人保持在相同物理位置的动作可以被所述系统感测和利用,以便传送人的真实运动并将它们复制在vr环境中。这两种已知的系统都适应正常行走运动期间脚的自然弯曲,并且所述系统可以被布置成使晕动病最小化。本发明是这些已知概念的发展。
3、与公知vr鞋类相关的一个问题是,vr鞋类在处理穿着者的脚在除了笔直向前或纵向方向之外的任何方向上的物理运动方面是低效的;人们不仅用脚精确地纵向行走,而且侧跨步并且踝关节的灵活性允许脚旋转,并允许人以一定角度侧向、横向、向后方向或沿弯曲路径行走,并且常规vr鞋类不能很好地快速适应这些非纵向或转向运动。另一个问题是vr鞋类可能过高,以致穿着者感觉好像他们在高平台鞋底的鞋上行走;这使得穿着者“感觉”不自然,不舒服,影响穿着者适当平衡的能力,并且有穿着者绊倒和跌倒的风险。vr鞋类还常常是笨重、体积大、机械复杂和制造昂贵的。us2018/0326286中公开的鞋类似乎仅能够补偿在vr环境中沿向前/向后方向行走,并且没有描述或解释鞋类如何可以补偿侧向的脚步(尽管提及“返回区域”,其被示出为地面上的圆圈)。ekto vr系统似乎补偿侧向运动以及向前/向后运动,并且通过具有多个动力脚轮来实现这一点;然而,这导致鞋类产品高、重并且显著宽于人脚,并且这种宽的鞋类难以在充分适应宽度之前走入。
4、为了解释本文所使用的一些方向术语,我们指的是人的解剖结构,其可以由三个正交平面来定义:
5、1.矢状(或纵向)平面,其将身体分成右部和左部,并且相对于用户向前、向后和竖直地延伸,
6、2.冠状(或正面)平面,其将身体分成前部和后部,并且相对于用户向左、向右和竖直地延伸,以及
7、3.水平、轴向或横向平面,其将身体分成顶部和底部,向前、向后延伸,以及相对于用户向左和向右延伸。
8、本文使用的术语“向前”、“前”、“后”和“后部”等或相关术语通常应相对于鞋类的用户的矢状平面解释,本文使用的诸如“左”、“右”、“横向”等术语或相关术语应相对于鞋类的穿着者的冠状平面解释,并且本文使用的诸如“上”、“下”、“上方”、“下方”等术语或相关术语应相对于鞋类的穿着者的水平平面解释。还应当注意,尽管当行走时人的脚通常与身体对齐并且在纵向平面中操作,但是踝关节还允许脚绕小腿旋转,使得脚不再相对于用户的纵向对齐;在这种情况下,方向术语应被解释为相对于穿着者的脚和相对于鞋类本身,特别是相对于鞋类的与穿着者的脚紧密接触的部分。
技术实现思路
1、本发明基于这样的认识,即,存在的推进装置解决了传统vr鞋类的许多问题,并提供了额外的优点。
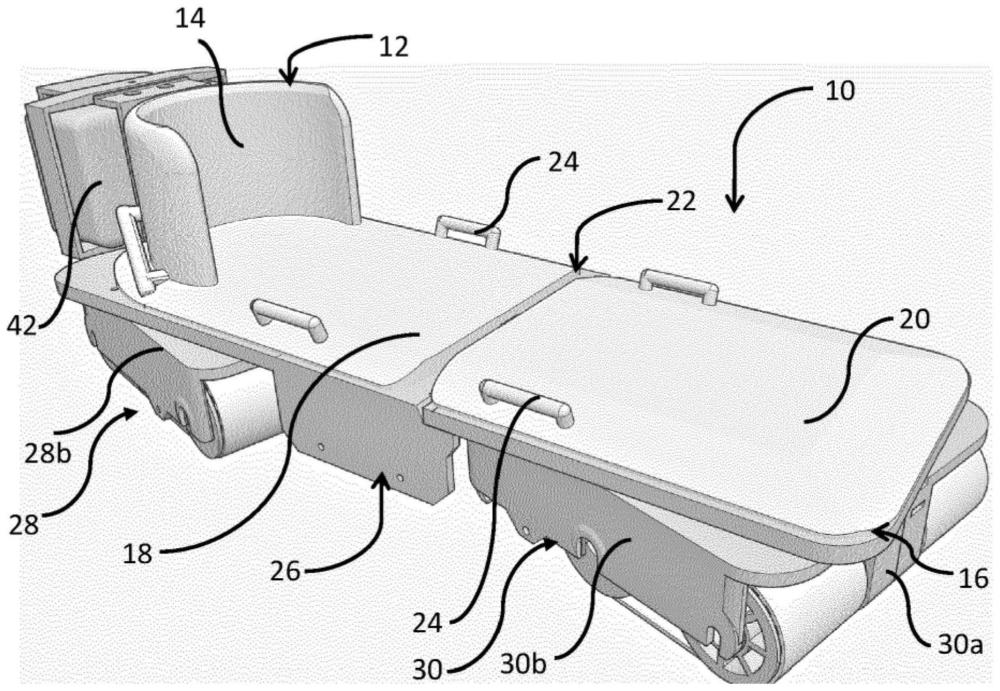
2、因此,本发明提供了一种用于虚拟现实环境中的鞋类组件,包括:前平台部分,其具有适于并被配置为支撑并可释放地保持用户脚的前部的上表面;以及后平台部分,其具有适于并被配置为支撑并可释放地保持用户脚的后部的上表面,前平台部分和后平台部分通过横向铰链被连接,使得平台部分可以在纵向平面中相对于彼此枢转,以适应在行走时发生的用户脚的弯曲,其中每个平台部分在其下表面上安装有至少一个驱动马达,每个驱动马达驱动连续带,并且每个平台部分上的两个连续带基本上平行地布置,一个连续带位于平台部分的每一侧,并且其中前平台部分的一个或多个驱动马达和连续带安装至前驱动模块,后平台部分的一个或多个驱动马达和连续带安装至后驱动模块,驱动模块安装在它们各自的平台部分的下方,使得每个驱动模块可以在水平平面中相对于安装在其下方的平台部分旋转。
3、通过这种布置,在组件的每侧上具有前后布置的两个单独的连续带,连续带以与履带或坦克履带相同的方式操作,并且连续带可以允许以与履带相同的方式进行一定程度的转向,但是每个“履带”的相对较短的长度(在使用中,前平台部分和后平台部分的长度一起优选地与大人的脚的长度大致相同,每个“履带”不超过脚的长度的大约一半)允许比使用与脚相同长度的带的系统(例如us2018/0326286中的系统)更大程度地转向。
4、在每个驱动模块中可以存在两个马达,每个马达驱动一个连续带;在用户的脚下使用四个被驱动的连续带意味着,当用户穿着组件行走时,用于补偿运动的驱动力可以在四个马达(每个模块中两个马达)之间分配,这允许马达比每个模块仅有单个马达的情况下更小,并且如果马达被独立地控制,则允许组件更好地适应和补偿沿向前方向的正常行走期间以及在侧跨步、侧向或转向运动期间沿着脚和跨过脚的体重分布的变化。如下文将描述的,对马达的独立控制还有利于减少晕动病产生的影响。最后,这种布置允许非常紧凑和低高度的组件,如将在下面描述的实施例中看到的。如us2018/0326286中所述,当沿向前方向的行走时,铰链允许用户的脚正常弯曲(在脚掌处,脚趾和脚跟之间)。上文有意使用词语“基本(上)”以适应如下事实,即,如在履带中那样,当带用于补偿转向或侧向运动时,这可以通过允许带沿着其长度进行的一定量的暂时挠曲和/或横向运动而得到辅助,在该过程期间,两个带暂时不平行地对齐。应当理解,可以仅存在一个马达来驱动模块中的两个连续带,并且鞋类组件可以容易地被配置为由具有或不具有外部鞋类的用户使用,并且在本文使用的词语“脚”应当相应地解释。
5、允许驱动模块相对于平台和脚旋转,平台支撑改善了组件的可操纵性,并因此改善了组件的补偿组件的用户/穿着者的可能脚运动的宽范围的能力,所述脚运动包括侧跨步、与向前方向成一定角度的步、以及脚的方向在脚步中间改变(即,转向)的步。
6、优选地,具有适于选择性地使前驱动模块相对于前平台部旋转的前转向马达和适于选择性地使后驱动模块相对于后平台部旋转的后转向马达。转向马达可以适于驱动两个驱动模块旋转,使得转向马达在旋转时保持对齐和平行,或者使得转向马达在相同方向上但以不同速率旋转,或者使得转向马达在不同方向上和/或以不同速率旋转;这允许对用户可能进行的可能运动的范围的最大适应性,同时是可控制的以便最小化潜在的晕动病影响。驱动模块的旋转运动可以被限制为在从纵向平面的任一方向上最大为90°;这是有利的,因为这意味着,通过电线/电缆可以容易地实现动力和控制,而不用担心缠结或卡住,并且转向马达只需要转动每个驱动模块总共180°。驱动马达可以在两个方向上操作,以便有效地提供驱动模块的360°的运动。转向马达可以是步进马达,或者转向马达可以是带齿轮dc马达(或者称为伺服马达),其中任一马达联接到位置传感器;它们通过适当的齿轮运动容易地适于提供受控程度的分度旋转运动,同时支撑人的体重,分度运动允许直接计算每一步对用户脚的实际运动的补偿效果。
7、连续带可以具有相同的长度,并且马达可以位于连续带内。马达可以通过作用于连续带在其间伸展的两个滑轮中的一个上来直接驱动连续带,或者通过驱动与两个滑轮中的一个接合的主带的马达来间接驱动连续带;主带优选地小于连续带(在宽度和长度上)。提供相等长度的带提供了改进的重量和负载能力,并增加了设备的寿命,它还简化了设计并减少了设备的长期维护所需的不同消耗部件的数量。优选地,当连续带具有相等长度时,马达经由与马达同轴的花键轮来驱动主带,使得马达和相关的主带可以位于驱动模块的相对两侧上,使得它们可以装配在连续带内。将马达定位在带内保护了马达免受损坏,如同将主带定位在连续带内那样,将马达和花键轮定位在驱动模块的相对两侧上有助于分散和/或均衡在使用中施加在设备上的力,同时实现总体紧凑的尺寸和配置。
8、每个模块上的连续带可以具有不同的长度。这可以被认为是不期望的或不必要的特征,因为其暗示了在每个模块的相对两侧上的带具有与地面接触的不同表面积,并且因此具有较少的抓地力/牵引力以传递驱动运动;然而,所关心的实际接触区域是带的直接位于驱动轮和驱动滑轮下方的部分,因为这些驱动轮和驱动滑轮将它们下方的带压靠在地面上。每个带在驱动轮之间的中间部分对牵引/抓地力没有显著贡献,因为它没有像夹在地面和驱动轮/滑轮之间的那样牢固地压靠在地面上。使一条带长于模块另一侧上的一对带也允许马达完全延伸跨过模块(从模块的一侧到模块的另一侧),但是使得较短的带的马达位于较长的带内,这允许整体设计在水平平面上非常紧凑,基本上不大于大的占地面积,并且不过高。
9、前平台部分下面的较短连续轨道可以与后平台部分下面的较长连续带在前平台部分的同一侧上纵向对齐,反之亦然。这确保了至少在向前行走时,可横向地消除由不同长度的带引起的体重支撑和摩擦接合之间的差异;这可以通过使较长的带具有比较短的带更大的摩擦系数的表面来辅助。
10、每个连续带可以在具有轴向肋的至少一个驱动轮和具有轴向肋的至少一个滑轮之间延伸,每个连续带的内表面可以具有与驱动轮和滑轮上的肋互补的横向肋,并且连续带的内表面可以具有基本上在带的整个内表面上纵向延伸的肋。这种布置可用于限制带相对于驱动轮/滑轮的横向运动量,并防止带从其脱离接合。在驱动轮和滑轮中可以设置周向通道,纵向肋定位和配置为配合在这些通道内,使得带被保持以防止横向脱离接合。另外或替代地,所述或每个驱动轮和/或所述或每个滑轮由一对分离的、轴向间隔的带肋轮形成,所述或每对轮的轴向间隔提供与上述周向通道相同的效果。优选地,纵向肋的横向尺寸小于周向通道的轴向尺寸;这允许带的一些横向运动(这对于转向是有利的),但是对其进行限制(这降低了带脱离接合的风险)。
11、优选地,驱动马达是无刷dc电动马达。这些驱动马达是紧凑的、可靠的,并且能够提供适于施加力和速度/加速度的高转矩,所述力和速度/加速度是补偿人的运动(比方说高达大约100kg)所需的,从而降低晕动病的风险。
12、用于虚拟现实环境的系统可以包括一对如上所述的鞋类组件,每个鞋类组件包括用于在组件之间和/或组件与外部vr环境计算机之间传输数据的发射器/接收器。每个组件将具有其自己的电源,该电源位于穿着者的脚跟(如us2018/0326286中)或位于每个组件的一个或两个模块内和/或位于模块安装所在的底架内。在外部vr环境计算机中可以存在处理器以用于处理和操作数据,和/或在每个鞋类组件中可以提供处理器,用于分配这些功能。
13、该系统可以适于针对每只脚的每次步幅(或单步)计算至少一次校正矢量,该校正矢量表示用户身体中心的实际坐标与原点(起始位置)坐标之间的距离和方向。该系统可以适于利用校正矢量和每个vr鞋类组件的实际航向来计算每个驱动模块的旋转角度,并调节驱动马达的速度(比用户的实际行走速度更快或更慢),以便逐渐使用户返回到用户的初始开始位置。该系统可以适于组合来自两个鞋类组件的位置数据,以确定它们相对于用户身体(躯干)的航向/方向,并使用该航向用于vr环境内的方向控制和/或用于位置校正。这是有利的,因为不需要将附加的电子器件和传感器附接到用户的身体,从而降低了成本和复杂性。
本文地址:https://www.jishuxx.com/zhuanli/20240615/80092.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表