壳状牙科器械的切割作业调整方法、装置和电子设备与流程
- 国知局
- 2024-07-12 10:19:36
本技术实施例涉及医疗,特别涉及一种壳状牙科器械的切割作业调整方法、装置和电子设备。
背景技术:
1、错颌畸形是指儿童生长发育过程中,由先天因素或后天因素导致的牙齿、颌骨、颅面的畸形,错颌畸形与龋齿、牙周病一起被列为口腔三大常见病,错颌畸形的患病率甚至高达人口的50%以上,而随着医疗技术的不断发展和人们对口腔健康、口腔美学的需要,牙齿矫治技术已越来越成熟和普遍,其大体上可以分为两大类方式,即通过牙齿矫治器正畸矫治和通过外科手术进行矫治,其中,通过矫治器正畸矫治是很受欢迎的一种矫治方式。
2、牙齿矫治器在制备过程中,需要进行自动化切割这一重要步骤,然而刀具在沿切割路径进行切割的过程中,可能会与牙颌模型发生碰撞,造成切割失败。
3、为此,矫治器自动化切割时,往往需要对自动化切割过程进行碰撞检测,目前,常见的碰撞检测算法是基于包围盒算法对切割器具和压制膜片的牙颌模型建立层次包围盒,通过层次包围盒与压制膜片的牙颌模型的各个面片进行相交检测来实现碰撞检测,但这种基于层次包围盒的包围盒算法过程复杂繁琐且计算量大,造成碰撞检测效率较低,另外,目前的碰撞检测算法都是一旦检测到碰撞就会停止自动化切割,严重影响了自动化切割作业的效率和通过率。
技术实现思路
1、本发明的目的在于提供一种壳状牙科器械的切割作业调整方法、装置和电子设备,以高效、准确地预测壳状牙科器械在切割作业过程中是否会与牙颌模型发生碰撞,并在预测发生碰撞的情况下对切割作业的方向进行调整来消除碰撞,大大提升了切割作业的效率和通过率。
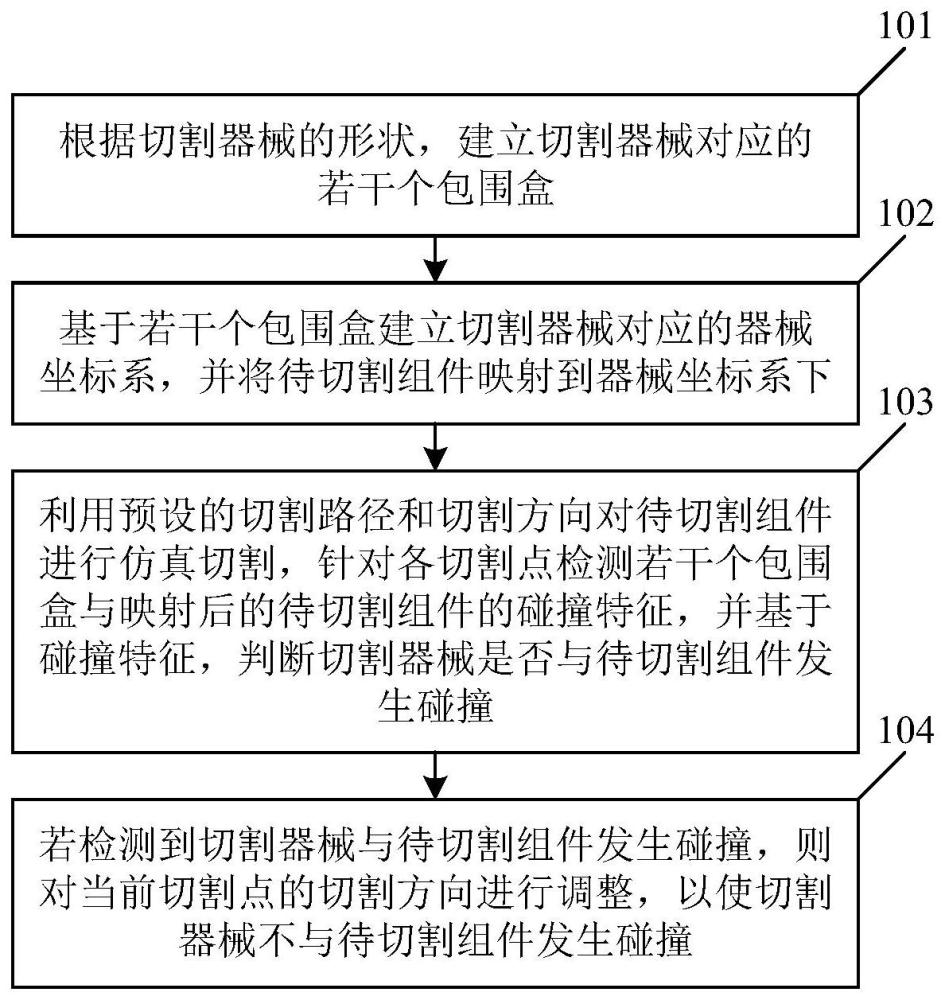
2、为解决上述技术问题,本技术的实施例提供了一种壳状牙科器械的切割作业调整方法,包括:根据切割器械的形状,建立所述切割器械对应的若干个包围盒;基于所述若干个包围盒建立所述切割器械对应的器械坐标系,并将待切割组件映射到所述器械坐标系下;利用预设的切割路径和切割方向对所述待切割组件进行仿真切割,针对各切割点检测所述若干个包围盒与映射后的所述待切割组件的碰撞特征,并基于所述碰撞特征,判断所述切割器械是否与所述待切割组件发生碰撞;若检测到所述切割器械与所述待切割组件发生碰撞,则对当前切割点的切割方向进行调整,以使所述切割器械不与所述待切割组件发生碰撞。
3、本技术的实施例还提供了一种壳状牙科器械的切割作业调整装置,包括包围盒构建模块、坐标系映射模块、仿真模块、碰撞检测模块和调整模块;所述包围盒构建模块,用于根据切割器械的形状,建立所述切割器械对应的若干个包围盒;所述坐标系映射模块,用于基于所述若干个包围盒建立所述切割器械对应的器械坐标系,并将待切割组件映射到所述器械坐标系下;所述仿真模块,用于利用预设的切割路径和切割方向对所述待切割组件进行仿真切割;所述碰撞检测模块,用于针对各切割点检测所述若干个包围盒与映射后的所述待切割组件的碰撞特征,并基于所述碰撞特征,判断所述切割器械是否与所述待切割组件发生碰撞;所述调整模块,用于在检测到所述切割器械与所述待切割组件发生碰撞时,对当前切割点的切割方向进行调整,以使所述切割器械不与所述待切割组件发生碰撞。
4、本技术的实施例还提供了一种电子设备,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的壳状牙科器械的切割作业调整方法。
5、本技术的实施例提供的壳状牙科器械的切割作业调整方法、装置、电子设备和存储介质,在进行切割作业之前,要先根据切割器械的形状,建立切割器械对应的若干个包围盒,再基于若干个包围盒建立切割器械对应的器械坐标系,并将待切割组件映射到器械坐标系下,随后利用预设的切割路径和切割方向对待切割组件进行仿真切割,针对各切割点检测若干个包围盒与映射后的待切割组件的碰撞特征,并基于所述碰撞特征,判断切割器械是否与待切割组件发生碰撞,若检测到切割器械与待切割组件发生碰撞,则对当前切割点的切割方向进行调整,使得切割器械不与待切割组件发生碰撞。考虑到业内常用的碰撞检测方法检测过程复杂繁琐,效率较低,并且一旦检测到碰撞就会停止切割作业,严重影响了切割作业效率和通过率,而本技术的实施例,将切割器械抽象成若干包围盒,建立器械坐标系并将待切割组件映射到该坐标系下进行仿真切割,从而快速、准确地预测切割器械在切割作业过程中是否会与待切割组件发生碰撞,并在预测发生碰撞的情况下对切割作业的方向进行调整来消除碰撞,大大提升了切割作业的效率和通过率。
6、在一些可选的实施例中,所述根据切割器械的形状,建立所述切割器械对应的若干个包围盒具体为:基于所述切割器械的不同部位的几何形状轮廓,建立若干个同轴并分别包括不同部位几何形状轮廓的柱体包围盒。这样的柱体包围盒可以很好地代表切割器械,利用该若干个柱体包围盒进行碰撞检测更加的高效、快捷。
7、在一些可选的实施例中,所述基于所述切割器械的不同部位的几何形状轮廓,建立若干个同轴并分别包括不同部位几何形状轮廓的柱体包围盒,包括:基于所述切割器械的几何形状轮廓将所述切割器械分成若干段;根据所述切割器械的各段的几何形状轮廓和第一预设距离,分别创建包络所述切割器械的各段的几何形状轮廓的柱体结构,并对各所述柱体结构除中轴线方向外的维度上独立缩放所述第一预设距离,形成所述各段对应的柱体包围盒;其中,所述各段对应的柱体包围盒的中轴线重合,所述待切割组件为牙颌模型,所述第一预设距离基于所述切割器械切割时的入射深度确定。切割作业的目的是将壳状矫治器械从牙颌模型上切割下来,因此在生成柱体包围盒时需要将壳状矫治器械的厚度考虑在内,从而更准确地进行碰撞检测。
8、在一些可选的实施例中,所述第一预设距离包括所述切割器械切割时的入射深度和预设的容错距离。在切割作业过程中,切割器械难免会因为震动而产生误差,因此本技术还设置了容错距离,进一步提升碰撞检测的准确性。
9、在一些可选的实施例中,所述基于所述若干个包围盒建立所述切割器械对应的器械坐标系,包括:在所述若干个同轴并分别包括不同部位几何形状轮廓的柱体包围盒中选取第一目标柱体包围盒,以所述第一目标柱体包围盒的中心作为所述器械坐标系的坐标原点,并将所述第一目标柱体包围盒的中轴线方向作为所述器械坐标系的第三坐标轴方向;基于所述器械坐标系的所述坐标原点、所述器械坐标系的所述第三坐标轴方向和世界坐标系的第三坐标轴方向,得到所述器械坐标系的第一坐标轴方向;基于所述器械坐标系的所述第一坐标轴方向和所述器械坐标系的第三坐标轴方向,得到所述器械坐标系的第二坐标轴方向。采用固定方向定位叉乘的方式建成的器械坐标系更加标准、规范。
10、在一些可选的实施例中,所述基于所述若干个包围盒建立所述切割器械对应的器械坐标系,包括:将所述若干个同轴并分别包括不同部位几何形状轮廓的柱体包围盒的中轴线方向作为所述器械坐标系的第三坐标轴方向,并在所述中轴线方向上任意选择一点作为所述器械坐标系的坐标原点;基于所述坐标原点,任意选定一个垂直于所述器械坐标系的第三坐标轴方向的方向,作为所述器械坐标系的第一坐标轴方向;基于所述坐标原点,确定同时垂直于所述器械坐标系的第一坐标轴方向和所述器械坐标系的第三坐标轴方向的方向,作为所述器械坐标系的第二坐标轴方向。采用自选方向的方式建成的器械坐标系更加灵活、符合实际情况。
11、在一些可选的实施例中,所述检测所述若干个包围盒与映射后的所述待切割组件的碰撞特征,包括:获取映射后的所述待切割组件的各顶点的坐标,并基于所述切割器械的入射深度确定待检测顶点;遍历映射后的所述待切割组件的各待检测顶点,基于当前待检测顶点的坐标在若干个柱体包围盒中确定第二目标柱体包围盒;基于当前待检测顶点的坐标与所述第二目标柱体包围盒的相对位置关系,确定所述当前待检测顶点与所述第二目标柱体包围盒的碰撞特征;根据各所述待检测顶点与各所述第二目标柱体包围盒的碰撞特征,确定所述若干个柱体包围盒与映射后的所述待切割组件的碰撞特征。待切割组件的各顶点,即待切割组件中各面片相交形成的点,可以很好地表征待切割组件的凹凸形状,基于待检测顶点和第二目标柱体包围盒进行碰撞检测,可以大幅提升碰撞检测的效率。
12、在一些可选的实施例中,所述基于当前待检测顶点的坐标与所述第二目标柱体包围盒的相对位置关系,确定所述当前待检测顶点与所述第二目标柱体包围盒的碰撞特征,包括:基于所述当前待检测顶点向所述第二目标柱体包围盒的中轴线发射第一垂直射线,获取所述第一垂直射线与所述第二目标柱体包围盒的边缘交点;基于所述边缘交点确定所述当前待检测顶点与所述第二目标柱体包围盒的碰撞特征。采用做射线在第二目标柱体包围盒找边缘交点的方式进行碰撞检测,可以大幅提升碰撞检测的速度。
13、在一些可选的实施例中,所述基于所述边缘交点确定所述当前待检测顶点与所述第二目标主体包围盒的碰撞特征,包括:若所述边缘交点的数量大于1,则确定所述当前待检测顶点位于所述第二目标柱体包围盒外,所述当前待检测顶点与所述第二目标柱体包围盒的碰撞特征为未发生碰撞;若所述边缘交点的数量等于1,则确定所述当前待检测顶点位于所述第二目标柱体包围盒内,所述当前待检测顶点与所述第二目标柱体包围盒的碰撞特征为发生碰撞。
14、在一些可选的实施例中,所述若干个同轴并分别包括不同部位几何形状轮廓的柱体包围盒为若干个圆柱体包围盒,所述检测所述若干个包围盒与映射后的所述待切割组件的碰撞特征,包括:获取映射后的所述待切割组件的各顶点的坐标,并基于所述切割器械的入射深度确定待检测顶点;遍历映射后的所述待切割组件的各待检测顶点,基于当前待检测顶点的坐标以及各圆柱体包围盒的几何参数,确定所述当前待检测顶点与所述若干个圆柱体包围盒的碰撞特征;根据各所述待检测顶点与所述若干个圆柱体包围盒的碰撞特征,确定所述若干个包围盒与映射后的所述待切割组件的碰撞特征。采用检测坐标位置是否在包围盒内的方式进行碰撞检测,可以大幅提升碰撞检测的精度。
15、在一些可选的实施例中,通过以下公式,基于当前待检测顶点的坐标以及各圆柱体包围盒的几何参数,确定所述当前待检测顶点与所述若干个圆柱体包围盒的碰撞特征:
16、
17、其中,(xi,yi,zi)为所述当前待检测顶点的坐标,rk为第k个圆柱体包围盒的横截面的半径,hk-hk-1为第k个圆柱体的高度,h0为所述切割器械的入射深度,k为所述圆柱体包围盒的个数,n为所述待检测顶点的个数,ci=0表示所述当前待检测顶点与所述若干个同轴且不重叠的圆柱体包围盒的碰撞特征为未发生碰撞,ci=1表示所述当前待检测顶点与所述若干个同轴且不重叠的圆柱体包围盒的碰撞特征为发生碰撞。
18、在一些可选的实施例中,所述根据切割器械的形状,建立所述切割器械对应的若干个包围盒具体为:根据所述切割器械的形状,基于最小包围盒算法对所述切割器械建立层次包围盒,所述层次包围盒中的各层包围盒同轴。
19、在一些可选的实施例中,所述根据所述切割器械的形状,基于最小包围盒算法对所述切割器械建立层次包围盒,包括:根据所述切割器械的几何形状轮廓将所述切割器械分成若干层;根据所述切割器械的各层的几何形状轮廓和第一预设距离,基于所述最小包围盒算法,分别创建包络所述切割器械的各层的几何形状轮廓的包围盒,得到所述切割器械对应的层次包围盒;其中,所述待切割组件为牙颌模型,所述第一预设距离基于压制所述牙颌模型的壳状矫治器械确定。
20、在一些可选的实施例中,所述基于所述若干个包围盒建立所述切割器械对应的器械坐标系,包括:在所述层次包围盒中选取第一目标层次包围盒,将所述第一目标层次包围盒的中心作为所述器械坐标系的坐标原点,并将所述第一目标层次包围盒的中轴线方向作为所述器械坐标系的第三坐标轴方向;基于所述器械坐标系的所述坐标原点、所述器械坐标系的所述第三坐标轴方向和世界坐标系的第三坐标轴方向,得到所述器械坐标系的第一坐标轴方向;基于所述器械坐标系的所述第一坐标轴方向和所述器械坐标系的第三坐标轴方向,得到所述器械坐标系的第二坐标轴方向。
21、在一些可选的实施例中,所述基于所述若干个包围盒建立所述切割器械对应的器械坐标系,包括:将所述层次包围盒的中轴线方向作为所述器械坐标系的第三坐标轴方向,并在所述中轴线方向上任意选择一点作为所述器械坐标系的坐标原点;基于所述坐标原点,任意选定一个垂直于所述器械坐标系的第三坐标轴方向的方向,作为所述器械坐标系的第一坐标轴方向;基于所述坐标原点,确定同时垂直于所述器械坐标系的第一坐标轴方向和所述器械坐标系的第三坐标轴方向的方向,作为所述器械坐标系的第二坐标轴方向。
22、在一些可选的实施例中所述检测所述若干个包围盒与映射后的所述待切割组件的碰撞特征,包括:获取映射后的所述待切割组件的各顶点的坐标,并基于所述切割器械的入射深度确定待检测顶点;遍历映射后的所述待切割组件的各待检测顶点,基于当前待检测顶点的坐标在所述层次包围盒中确定若干第二目标层次包围盒;基于各第二目标层次包围盒的层次关系,判断当前待检测顶点与各所述第二目标层次包围盒的相对位置关系,确定所述当前待检测顶点与各第二目标层次包围盒的碰撞特征;根据各所述待检测顶点与各所述第二目标层次包围盒的碰撞特征,确定所述若干个包围盒与映射后的所述待切割组件的碰撞特征。
23、在一些可选的实施例中,所述基于各第二目标层次包围盒的层次关系,判断当前待检测顶点与各所述第二目标层次包围盒的相对位置关系,确定所述当前待检测顶点与各第二目标层次包围盒的碰撞特征,包括:由所述当前待检测顶点向所述层次包围盒的中轴线发射第二垂直射线,基于由外向内的层次关系,获取所述第二垂直射线与当前层次的所述第二目标层次包围盒的边缘交点;基于所述边缘交点确定所述当前待检测顶点与当前层次的所述第二目标层次包围盒的碰撞特征。
24、在一些可选的实施例中,所述对当前切割点的切割方向进行调整,包括:基于所述当前切割点,以所述切割方向为中心轴,获取若干个第一备选切割方向;遍历各所述第一备选切割方向,基于当前第一备选切割方向更新所述切割器械对应的器械坐标系,将所述待切割组件映射到更新后的所述器械坐标系下;利用所述切割路径和所述当前第一备选切割方向进行切割,检测所述若干个包围盒与映射后的所述待切割组件的碰撞特征,并基于所述碰撞特征,判断所述切割器械是否与所述待切割组件发生碰撞;若仅存在一个所述第一备选切割方向上,所述切割器械不与所述待切割组件发生碰撞,则将所述第一备选切割方向作为新的切割方向。如果预测切割器械会与待切割组件发生碰撞,本技术则基于当前的切割方向寻找若干第一备选方向,在各第一备选方向中选择不会发生碰撞的作为新的切割方向,保证切割作业可以顺利进行。
25、在一些可选的实施例中,所述基于当前切割点,以所述切割方向为中心轴,获取若干个第一备选切割方向,包括:以所述当前切割点为起点、所述切割方向为旋转轴,并以预设角度为母线与旋转轴的夹角,建立第一圆锥;选取所述第一圆锥的若干个母线方向,作为所述若干个第一备选切割方向。这样选定的各第一备选方向更加丰富、符合切割作业的真实情况。
26、在一些可选的实施例中,所述方法还包括:若存在至少两个所述第一备选切割方向上,所述切割器械不与所述待切割组件发生碰撞,则将所述至少两个所述第一备选切割方向中,所述待切割组件与所述若干个包围盒的中轴线之间的距离最小的第一备选切割方向,作为新的切割方向。实际上原定的切割方向是非常合适的切割方向,而备选切割方向是在碰撞情况下的被迫选择,因此本技术选择待切割组件与若干个包围盒的中轴线之间的距离最小的第一备选切割方向,作为新的切割方向,可以很好地保证切割作业的切割效果。
27、在一些可选的实施例中,所述待切割组件与所述若干个包围盒的中轴线之间的距离,通过以下步骤获取:遍历所述至少两个第一备选切割方向,确定当前第一备选切割方向上所述待切割组件的各顶点与所述若干个包围盒的中轴线之间的第一距离;将各所述第一距离中的最小值,作为所述当前第一备选切割方向上所述待切割组件与所述若干个包围盒的中轴线之间的距离。
28、在一些可选的实施例中,所述方法还包括:若存在至少两个所述第一备选切割方向上,所述切割器械不与所述待切割组件发生碰撞,则随机选取所述至少两个所述第一备选切割方向中的一个第一备选切割方向,作为新的切割方向。
29、在一些可选的实施例中,所述方法还包括:若各所述第一备选切割方向上,所述切割器械均与所述待切割组件发生碰撞,则终止所述切割器械的切割作业。如果所有第一备选切割方向均存在碰撞,说明切割器械或待切割组件出现问题,切割作业无法进行,及时终止切割作业,可以避免资源的浪费。
30、在一些可选的实施例中,所述方法还包括:若各所述第一备选切割方向上,所述切割器械均与所述待切割组件发生碰撞,则分别计算各所述第一备选切割方向上,所述切割器械与所述待切割组件之间的碰撞距离;选定所述碰撞距离最小的第一备选切割方向为基准方向,并以所述基准方向为中心轴,获取若干个第二备选切割方向;遍历各所述第二备选切割方向,基于当前第二备选切割方向更新所述切割器械对应的器械坐标系,将所述待切割组件映射到更新后的所述器械坐标系下;利用所述切割路径和所述当前第二备选切割方向进行仿真切割,直到所述切割器械不与所述待切割组件发生碰撞。如果所有第一备选切割方向均存在碰撞,说明第一备选切割方向仍不到位,本技术可以继续选择第二备选方向,进一步提升切割作业的效率和通过率。
31、在一些可选的实施例中,所述分别计算各所述第一备选切割方向上,所述切割器械与所述待切割组件之间的碰撞距离,包括:遍历各所述第一备选切割方向,将当前第一备选切割方向上所述待切割组件的各顶点中与所述切割器械发生碰撞的顶点作为碰撞顶点;遍历各所述碰撞顶点,基于所述若干个包围盒的中轴线向当前碰撞顶点做第二垂直射线,交所述若干个包围盒的边缘于目标交点;获取所述当前碰撞顶点与所述目标交点之间的第二距离;将各所述第二距离中的最大值,作为所述当前第一备选切割方向上,所述切割器械与所述待切割组件之间的碰撞距离。
32、在一些可选的实施例中,所述方法还包括:若所述仿真切割的次数大于预设次数时,仍检测到所述切割器械与所述待切割组件发生碰撞,则终止所述切割器械的切割作业。本技术在仿真切割的次数大于预设次数时直接终止切割作业,可以避免过多的资源浪费。
本文地址:https://www.jishuxx.com/zhuanli/20240615/86232.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表