挂丝机器人的制作方法
- 国知局
- 2024-07-05 16:49:14
本发明涉及构成为能够执行向多个丝线卷取机的挂丝的挂丝机器人。
背景技术:
1、在专利文献1中公开了构成为能够执行向分别牵引从纺丝装置纺出的多个丝线的多个牵引装置(丝线卷取机)挂丝的挂丝机器人。挂丝机器人具备机器人主体以及可动部。机器人主体构成为能够沿着多个牵引装置排列配置的规定方向行进。可动部构成为能够通过相对于机器人主体移动来执行挂丝的动作。
2、此外,挂丝机器人具有构成为能够检测障碍物的区域传感器(检测部)。检测部安装于机器人主体的规定方向的端部。检测部构成为能够检测位于机器人主体的行进路径上的障碍物。当检测到障碍物时,使机器人主体的行进停止,由此避免机器人主体与障碍物的冲突。
3、专利文献1:日本特开2017-82381号公报
技术实现思路
1、挂丝机器人的机器人主体被控制为在进行挂丝的动作时停止行进。为了进一步提高安全性,要求在挂丝时避免人或者物接近挂丝机器人。此时,要求除了检测在规定方向上接近挂丝机器人的人或者物之外,还检测在与规定方向正交的方向上接近挂丝机器人的人或者物。但是,如果在专利文献1所记载的挂丝机器人中追加检测部,则挂丝机器人的零件成本增大。
2、本发明的目的在于避免检测部的数量的增加,并较宽地确保检测部对障碍物的检测区域。
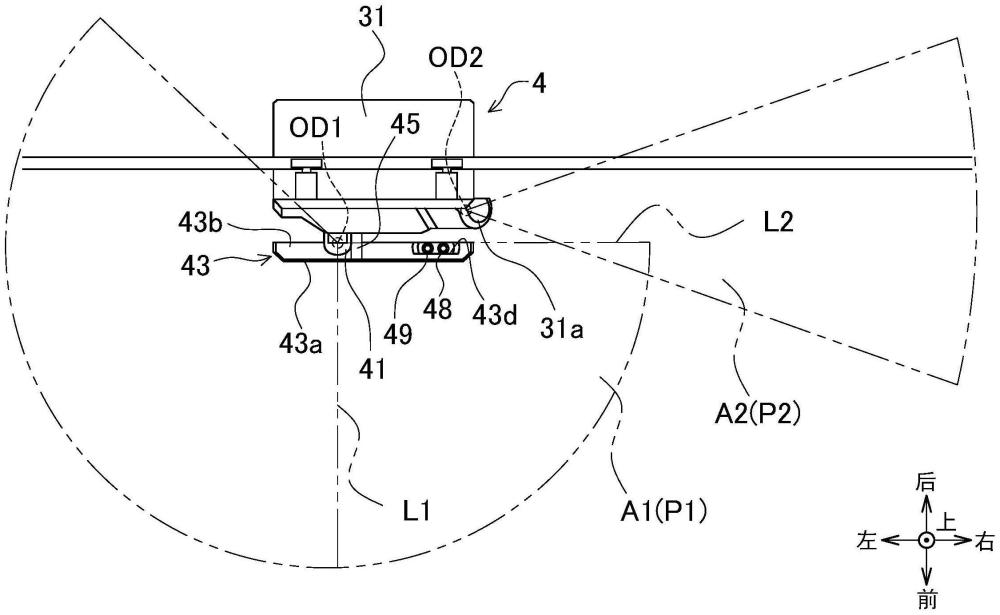
3、第1发明的挂丝机器人构成为能够执行向在与铅垂方向交叉的第1方向上排列配置的多个丝线卷取机的挂丝,具备:机器人主体,构成为能够在与铅垂方向以及上述第1方向的双方正交的第2方向上配置在比上述多个丝线卷取机靠一侧的状态下沿着上述第1方向行进;可动部,安装于上述机器人主体,构成为通过相对于上述机器人主体在规定的可动区域中动作来执行上述挂丝;以及第1检测部,安装于上述机器人主体,构成为能够检测位于规定的第1检测区域中的物体,上述第1检测部的至少一部分在上述第2方向上比上述机器人主体的上述一侧的端部向上述一侧突出。
4、挂丝机器人在第2方向上配置在比多个丝线卷取机靠一侧的位置,因此,要求在挂丝的执行中,在第2方向上在除了多个丝线卷取机的另一侧之外的尽可能宽的范围内检测障碍物。
5、关于这一点,在本发明中,第1检测部的至少一部分在第2方向上比机器人主体的一侧的端部更向一侧突出。由此,通过第1检测部,能够在较宽的范围内不受机器人主体以及可动部妨碍地检测障碍物。因而,能够避免检测部的数量的增加,并在必要的足够范围内检测障碍物。
6、第2发明的挂丝机器人为,在上述第1发明中,上述第1检测部在上述第2方向上从上述机器人主体向上述一侧分离地配置。
7、在本发明中,通过第1检测部,能够在更宽的范围内,不受机器人主体以及可动部妨碍地检测障碍物。
8、第3发明的挂丝机器人为,在上述第1或者第2发明中,上述第1检测区域以规定的第1检测原点为基准点延伸,上述第1检测原点配置在比上述可动部的上述可动区域靠上述第2方向的上述一侧的位置。
9、在本发明中,通过第1检测部,也能够在较宽的范围内,不受机器人主体以及可动部妨碍地检测障碍物。
10、第4发明的挂丝机器人为,在上述第1~第3的任一发明中,上述第1检测区域以规定的第1检测原点为基准点延伸到比上述机器人主体的配置区域以及上述可动部的上述可动区域的双方至少靠上述第1方向的一侧的位置,上述第1检测部配置成,当将以上述第1检测原点为出发点、与上述机器人主体的上述配置区域以及上述可动部的上述可动区域的任一个都不重叠地延伸到比上述配置区域以及上述可动区域的双方靠上述第1方向的上述一侧的规定的假想平面设为第1假想平面时,上述第1检测区域包含在上述第1假想平面中,上述第1假想平面为包括第1假想线段和第2假想线段的扇形,上述第1假想线段以上述第1检测原点为出发点、与上述机器人主体的上述配置区域以及上述可动部的上述可动区域的任一个都不重叠地延伸到比上述配置区域以及上述可动区域的双方靠上述第2方向的上述一侧的位置,上述第2假想线段以上述第1检测原点为出发点、与上述机器人主体的上述配置区域以及上述可动部的上述可动区域的任一个都不重叠地沿着上述第1方向向上述第1方向的另一侧延伸,延伸到比上述配置区域以及上述可动区域的双方靠上述第1方向的上述另一侧的位置。
11、在本发明中,通过第1检测部,也能够在较宽的范围内,不受机器人主体以及可动部妨碍地检测障碍物。
12、第5发明的挂丝机器人为,在上述第4发明中,上述第1假想平面的中心角度为180°以上。
13、在本发明中,通过第1检测部,能够在宽范围内检测障碍物。
14、第6发明的挂丝机器人为,在上述第1~第5的任一发明中,上述可动部具有:吸引部,构成为能够吸引保持行进中的丝线;以及配管部,与上述吸引部连接,构成为能够向上述吸引部供给用于生成吸引保持上述丝线的负压的流体且能够从上述吸引部排出上述流体,上述配管部中配置在上述机器人主体的外侧的部分的一部分固定于上述机器人主体。
15、如果配管部在挂丝时因惯性而意外地晃动,则有可能配管部意外地进入第1检测区域而产生误检测。在本发明中,通过将配管部中配置在机器人主体的外侧的部分的一部分固定于机器人主体,能够抑制配管部中配置在机器人主体的外侧的部分的晃动。因而,能够抑制第1检测部的误检测的产生。
16、第7发明的挂丝机器人为,在上述第1~第6的任一发明中,上述可动部的上述可动区域的至少一部分配置在比上述机器人主体靠上述第1方向的另一侧的位置,上述挂丝机器人具备第2检测部,该第2检测部安装于上述机器人主体,构成为能够检测位于规定的第2检测区域中的物体,上述第2检测区域以规定的第2检测原点为基准点延伸到比上述机器人主体的配置区域以及上述可动部的上述可动区域的双方至少靠上述第1方向的上述另一侧的位置,上述第2检测部配置成,当将以上述第2检测原点为出发点、与上述机器人主体的上述配置区域以及上述可动部的上述可动区域的任一个都不重叠地延伸到比上述配置区域以及上述可动区域的双方靠上述第1方向的上述另一侧的规定的假想平面设为第2假想平面时,上述第2检测区域包含在上述第2假想平面中。
17、在本发明中,配置第2检测部,以使得第2假想平面避开可动部的可动区域且延伸到比可动区域靠第1方向的另一侧的位置。此处,根据第2检测区域与可动部的可动区域的位置关系,有可能在可动部的可动区域的附近,在第2检测区域产生死角。关于这一点,在本发明中,通过第1检测部,能够在较宽的范围内不受机器人主体以及可动部妨碍地检测障碍物。由此,能够使第1检测部监视需要监视且第2检测部的监视无法到达的区域。因而,能够抑制死角的产生。
18、第8发明的挂丝机器人为,在上述第1~第7的任一发明中,上述第1检测部配置成,在上下方向上收纳在上述可动部的上述可动区域的内侧。
19、如果第1检测部在上下方向上配置在比可动部的可动区域靠外侧,则能够配置与挂丝机器人不同的部件等的空间有可能变窄。在本发明中,能够抑制因第1检测部的存在而导致能够配置其他部件等的空间变窄。
20、第9发明的挂丝机器人为,在上述第1~第8的任一发明中,上述机器人主体构成为从沿着上述第1方向延伸的轨道悬吊。
21、在本发明中,能够将机器人主体在上下方向上配置在较高的位置。由此,能够进一步减少人以及物与挂丝机器人接触的风险。此外,能够在机器人主体的下侧配置必要的机器以及/或者部件。
22、第10发明的挂丝机器人为,在上述第1~第9的任一发明中,上述挂丝机器人具备:框体,安装于上述机器人主体,固定上述第1检测部;以及罩,配置成当从上述第2方向的上述一侧观察时遮盖上述框体的至少一部分。
23、如果第1检测部以及框体向第2方向的一侧突出,则挂丝机器人的美观有可能受损。在本发明中,框体的至少一部分被罩遮盖,因此,能够抑制美观受损。此外,通过罩能够保护框体等不受污染以及障碍物影响。
24、第11发明的挂丝机器人为,在上述第1~第10的任一发明中,其特征在于,上述第1检测部包含在区域传感器中,上述区域传感器构成为能够检测被位于规定的假想平面内的物体反射的检测介质。
25、在本发明中,能够通过通常普及的区域传感器检测障碍物。
本文地址:https://www.jishuxx.com/zhuanli/20240617/44526.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表