一种旋转式机械手的制作方法
- 国知局
- 2024-07-05 17:43:51
本技术涉及机械自动化,具体涉及一种旋转式机械手。
背景技术:
1、机械手即能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。ppu凸轮机械手是常见的一种高速拾放移动机械手,如中国发明专利申请cn112296980a公开的一种ppu高速拾放移动机械手,又比如申请人在先申请的发明专利申请cn116810807a公开的一种机械手。
2、上述ppu机械手均是通过ppu驱动模组,搭配十字型的滑块模组,实现整体的升降与平移动作,机械手在抓取相应产品后,能够带动产品沿门型轨迹移动,从而实现产品的转移搬运。
3、但是,上述机械手做搬运动作时,每次只能抓取一个产品,当产品送到位后,机械手需要先复位后,才能抓取下一个产品,动作效率比较低。
4、另外,ppu机械手的运动轨迹与行程往往都是固定而无法调整,而且ppu机械手的运动行程越大,ppu机械手本身的体积也越大,成本也要大幅增加。
技术实现思路
1、为了克服背景技术的不足,本实用新型提供一种旋转式机械手。
2、本实用新型所采用的技术方案:一种旋转式机械手,包括固定座以及安装在固定座上的驱动组件与十字滑块组件,所述十字滑块组件包括纵向设置的第一滑轨、横向设置的第二滑轨以及连接第一滑轨与第二滑轨的十字滑块,所述第一滑轨固定安装在固定座上,所述第二滑轨与驱动组件连接,且所述驱动组件能驱动第二滑轨升降与平移动作;
3、还包括旋转组件,所述旋转组件包括安装架、转轴以及用于安装夹持组件的夹具安装板,所述安装架固定安装在十字滑块上,所述转轴可旋转地安装在安装架上,并与第二滑轨联动连接, 所述第二滑轨的平移动作能驱使转轴旋转动作;所述夹具安装板安装在转轴上。
4、所述夹具安装板上设有两组夹持组件,且夹持组件相对转轴中心对称设置;所述第二滑轨能驱使转轴实现180度往复旋转。
5、所述安装架上设有两个同步轮以及绕设在两个同步轮上的同步带,所述转轴与其中一个同步轮同轴连接,所述第二滑轨与同步带固定连接。
6、所述驱动组件采用ppu驱动模组。
7、所述驱动组件包括摆线框、主轴、摆动件、摆线轴承、联动轴;所述摆线框固定设置在固定座正面,摆线框内壁形成摆线轮廓曲面,所述主轴可旋转地设置在固定座上,且主轴的输出端形成有偏心轴部;所述摆动件与主轴的偏心轴部旋转连接,所述摆线轴承设有3个,并沿摆动件旋转中心周向均布,所述摆线轴承与摆线轮廓曲面相贴合形成滚动配合;所述联动轴一端与摆动件旋转连接,另一端与第二滑轨旋转连接。
8、所述联动轴一端穿过其中一个摆线轴承中心设置,所述摆线轮廓曲面呈圆角方形,所述联动轴能够沿门字形轨迹移动动作。
9、所述摆线框上还设有盖板,所述联动轴穿出盖板,且所述盖板上形成有供联动轴活动的轨迹让位槽。
10、本实用新型的有益效果是:采用以上方案,夹具安装板上可设置多组夹持组件,将第二滑轨的升降平移动作转化成夹具安装板的升降旋转动作,便可满足夹具安装板上多组夹持组件的交替动作,大大提高工作效率;另外,也可以通过改变夹持组件与转轴之间的直线距离,便可以轻松实现运动行程的调节,通用性更好,替换成本也很低。
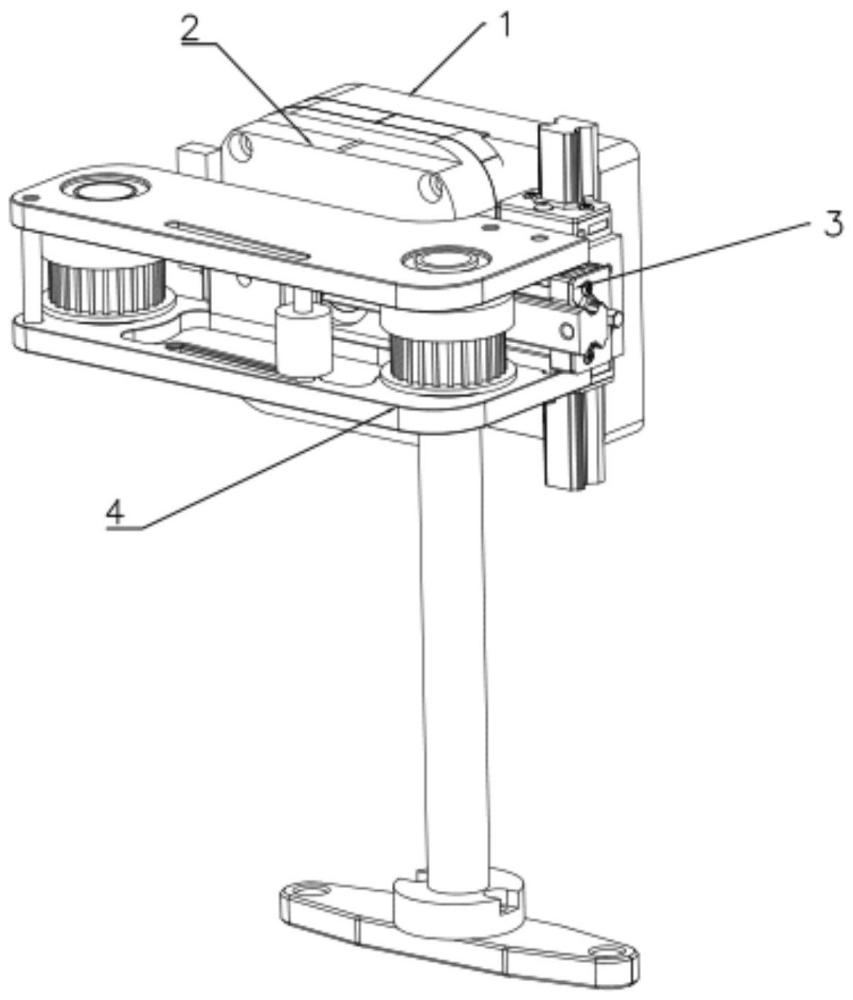
技术特征:1.一种旋转式机械手,包括固定座(1)以及安装在固定座(1)上的驱动组件(2)与十字滑块组件(3),所述十字滑块组件(3)包括纵向设置的第一滑轨(31)、横向设置的第二滑轨(32)以及连接第一滑轨(31)与第二滑轨(32)的十字滑块(33),所述第一滑轨(31)固定安装在固定座(1)上,所述第二滑轨(32)与驱动组件(2)连接,且所述驱动组件(2)能驱动第二滑轨(32)升降与平移动作;
2.根据权利要求1所述的旋转式机械手,其特征在于:所述夹具安装板(43)上设有两组夹持组件,且夹持组件相对转轴(42)中心对称设置;所述第二滑轨(32)能驱使转轴(42)实现180度往复旋转。
3.根据权利要求1所述的旋转式机械手,其特征在于:所述安装架(41)上设有两个同步轮(44)以及绕设在两个同步轮(44)上的同步带,所述转轴(42)与其中一个同步轮(44)同轴连接,所述第二滑轨(32)与同步带固定连接。
4.根据权利要求1所述的旋转式机械手,其特征在于:所述驱动组件(2)采用ppu驱动模组。
5.根据权利要求1所述的旋转式机械手,其特征在于:所述驱动组件(2)包括摆线框(21)、主轴(22)、摆动件(23)、摆线轴承(24)、联动轴(25);所述摆线框(21)固定设置在固定座(1)正面,摆线框(21)内壁形成摆线轮廓曲面,所述主轴(22)可旋转地设置在固定座(1)上,且主轴(22)的输出端形成有偏心轴部;所述摆动件(23)与主轴(22)的偏心轴部旋转连接,所述摆线轴承(24)设有3个,并沿摆动件(23)旋转中心周向均布,所述摆线轴承(24)与摆线轮廓曲面相贴合形成滚动配合;所述联动轴(25)一端与摆动件(23)旋转连接,另一端与第二滑轨(32)旋转连接。
6.根据权利要求5所述的旋转式机械手,其特征在于:所述联动轴(25)一端穿过其中一个摆线轴承(24)中心设置,所述摆线轮廓曲面呈圆角方形,所述联动轴(25)能够沿门字形轨迹移动动作。
7.根据权利要求6所述的旋转式机械手,其特征在于:所述摆线框(21)上还设有盖板(26),所述联动轴(25)穿出盖板(26),且所述盖板(26)上形成有供联动轴(25)活动的轨迹让位槽。
技术总结一种旋转式机械手,包括固定座以及安装在固定座上的驱动组件、十字滑块组件、旋转组件,旋转组件包括安装架、转轴以及用于安装夹持组件的夹具安装板,安装架固定安装在十字滑块上,转轴可旋转地安装在安装架上,并与第二滑轨联动连接,第二滑轨的平移动作能驱使转轴旋转动作;夹具安装板安装在转轴上。采用以上方案,将第二滑轨的升降平移动作转化成夹具安装板的升降旋转动作,满足夹具安装板上多组夹持组件的交替动作,大大提高工作效率;另外,通过改变夹持组件与转轴之间的直线距离,便可以轻松实现运动行程的调节,通用性更好,替换成本也很低。技术研发人员:陈涵受保护的技术使用者:温州市日康机械科技厂技术研发日:20231113技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240617/48940.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表