一种基于外附关节变形的空间自生长软体机器人
- 国知局
- 2024-07-05 17:45:02
本发明属于机器人领域,涉及一种软体机器人,尤其涉及一种基于外附关节变形的空间自生长软体机器人。
背景技术:
1、空间站内舱室设备仪器众多,管路纵横,形成许多狭小非结构化空间,宇航员难以通过身体甚至手臂进入这些空间中完成空间站的日常维护工作。空间机器人有利于帮助宇航员进入狭小空间中完成一些复杂操作,其中自生长软体机器人以其工作空间拓展性和环境适应性得到了广泛关注。其中生长以及变形能力是自生长软体机器人需要克服的重要问题。
2、现有的自生长软体机器人一般采用尖端外翻的方式实现尖端自生长,例如公开号cn114872082a公开的“一种自生长软体机器人及其硬化方法”,具体公开了密封盒体、储存卷筒和双层主体,双层主体由外层主体和内层主体构成,所述外层主体和内层主体之间设置有叠加支撑层,叠加层受压力叠加增加双层主体的刚性;所述双层主体内翻后收纳在储存卷筒上,双层主体固定连接在密封盒体上,密封盒体充气后气压驱动双层主体尖端外翻而生长。虽然此种结构可以实现尖端的自生长,但是仍然存在以下两个问题:一是,软体机器人的生长是由内翻到机械臂内部的部分伸出实现的,在自生长过程中,向机器人内充气,内翻部分产生外翻的动作,在机器人处于较大弯折角的状态下,内翻部分在经过机器人关节位置处时容易产生摩擦,不利于软体机器人通过外翻实现自生长;二是,一般机器人的操作工具是安装在机械臂的尖端的,通过调整机械臂的姿态改变尖端操作工具的位置,但是在上述方案中,随着尖端的自生长或者回缩,显然机械臂尖端的操作工具也需要随着尖端的生长或者回缩改变与机械臂本体连接处的相对位置,这就需要操作工具与软体机器人之间不能是固定连接,而只能是滑动连接,故无法保证操作工具与软体机器人连接的稳定性,且操作工具随着尖端的生长或者回缩产生的滑动运动需要更加复杂的操作。
3、虽然还可以通过软体机器人末端的收放机构实现机械臂长度的调整,例如公开号cn114084384a公开的“一种可大范围长距离作业的卷绕式充气伸缩臂”,具体公开了充气臂一端缠绕在收展装置上,收展装置实现充气臂的卷绕折叠及充气展开,充气臂另一端通过扩展端头,用于与不同核心舱末端执行机构进行连接,完成空间各项任务,收展装置内部安装有充气系统及抽气系统。虽然实现了机械臂长度的改变,但是仍然存在以下两个问题:一是,由于操作工具是安装在软体机器人尖端的,在确保目标位置的情况下,需要不断的调整机器人的长度、关节转向角度和弯折角度;如果将收展装置/机械臂伸长机构放置在末端,当外附关节姿态调整完成后,再进一步调整机器人长度的话,机器人上所有外附关节相对于目标的位置和姿态均发生改变,故每一个外附关节的姿态需要重新解算和调整,整体过程操作复杂,解算量比较大。二是,上述方案将充气系统及抽气系统安装在收展装置的内部,使得收展装置结构更加复杂。
4、另外,软体机器人的变形一般是通过关节实现,为了增加关节的自由度,公开号cn115781752b公开了“一种应用于软体机械臂的三自由度驱动关节”,具体公开了被动旋转基座和被动弯折基座同轴依次安装在支撑外壳的顶端,传动齿轮副和被动移动挤压副安装在支撑外壳内;主动驱动副安装在被动弯折基座上,主动驱动副的输出端与传动齿轮副的输入端连接,传动齿轮副的输出端与被动移动挤压副的输入端连接;换挡调节机构中的调节套筒套在传动齿轮副上,调节套筒由上至下移动过程中,在主动驱动副的驱动下和三组锁紧副的配合下可实现驱动关节在机械臂上的上下移动、机械臂的径向弯折和机械臂弯折方向的改变。虽然此关节具有三个自由度,但是仍然存在很多不足:
5、一是,同一时刻只能实现一个自由度的运动,难以实现多自由度复合运动。
6、二是,对软体机器人弯折处没有束缚并形成截面较小的弯折节点;导致软体机器人弯折时,关节机构对于机器人本体的约束不足,机器人弯折的精度差;另外由于软体机器人弯折节点的截面相对较大,局部刚度较大,增加了关节弯折时所需的扭矩。
7、三是,由于驱动关节仅具有一个弯折节点,弯折角度较大时(大于90°),机器人本体弯折处容易产生褶皱,阻碍关节处更大角度的弯折,增加了电机输出的负载。
8、四是,由于驱动关节的电机安装在弯折连杆上,与切换驱动电机非中心对称布置,电机重心偏载。
技术实现思路
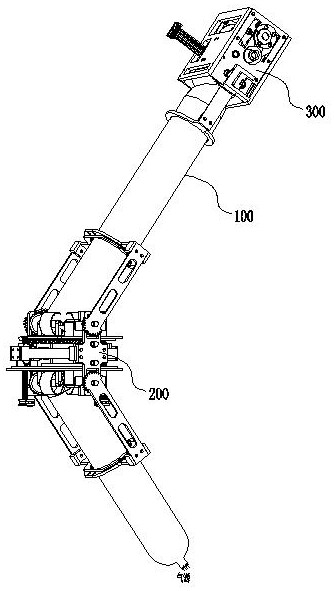
1、本发明为解决上述技术问题,提供一种基于外附关节变形的空间自生长软体机器人,以适应空间站中狭小环境的作业需求,该机器人主要由机器人本体、尖端自生长机构以及外附关节三部分组成,该机器人通过尖端自生长机构实现机器人本体的生长,并且通过外附关节可以驱动机器人实现空间三维变形,以适应工作环境的要求。
2、本发明为解决上述技术问题采用的技术方案是:
3、一种基于外附关节变形的空间自生长软体机器人,包括机器人本体、外附关节和尖端自生长机构;所述的外附关节套装在机器人本体上,所述的尖端自生长机构安装在机器人本体的尖端;
4、所述的外附关节包括中间驱动机构、两个支撑座、两个弯折转向输出单元和两个制动单元;两个所述的支撑座对称布置在中间驱动机构径向的两侧,每个支撑座均与中间驱动机构的外壳转动连接,并绕中间驱动机构的中轴线旋转;所述的中间驱动机构包括安装座、动力输出部、动力传输部一、动力传输部二和爬行单元,所述安装座的中心位置具有贯穿于上下表面的中心安装口,所述的动力输出部和爬行单元的动力输出端安装在安装座内,所述爬行单元的动力执行端安装在中心安装口内;所述的动力传输部一和动力传输部二布置在安装座外,其中动力传输部一同轴安装在安装座的顶端,并与安装座为转动连接;所述的动力传输部二转动连接在其中一个支撑座上并与动力传输部一形成传动关系;两个所述的弯折转向输出单元对称布置在中间驱动机构轴向的两侧,每个弯折转向输出单元均与两个支撑座转动连接,且两个所述的弯折转向输出单元之间形成传动关系;所述中间驱动机构的动力传输部二与靠近动力传输部一的弯折转向输出单元固定连接,在动力输出部的驱动下以及两个弯折转向输出单元的传动关系下实现了两个弯折转向输出单元的同步反向摆动;两个所述的制动单元对称布置在中间驱动机构轴向的两侧,其中处于中间驱动机构上方的制动单元通电并将支撑座和中间驱动机构中的动力传输部一连接为一体,以实现软体机器人的转向,将处于上方的制动单元称为转向制动单元;处于中间驱动机构下方的制动单元通电并将支撑座和中间驱动机构连接为一体,以实现软体机器人的弯折,将处于下方的制动单元称为弯折制动单元;
5、所述的外附关节通过两个弯折转向输出单元和中间驱动机构的爬行单元套在机器人本体上,并通过爬行单元与机器人本体形成固定关系,保证中间驱动机构与机器人本体在转向、弯折和爬行运动模式下不会产生相对旋转运动。
6、进一步的,所述的动力输出部包括转向弯折电机和输出锥齿轮,所述转向弯折电机的旋转扭矩传递给输出锥齿轮;所述的动力传输部一为具有不完全上锥齿和完全下锥齿的环形锥齿轮,所述的输出锥齿轮部分伸出安装座,并与环形锥齿轮的完全下锥齿相啮合;所述的动力传输部二为锥齿轮,并与环形锥齿轮的不完全上锥齿相啮合。
7、进一步的,所述的爬行单元包括爬行电机、主动轮二、从动齿轮一、从动齿轮二和两个摩擦辊轮,所述的爬行电机和主动轮二安装在安装座内,爬行电机的输出轴与主动轮二固连,两个所述的摩擦辊轮作为爬行单元的动力执行端并排转动安装在中心安装口内,并对机器人本体产生径向挤压;所述的从动齿轮一和从动齿轮二分别与两个摩擦辊轮(1-5-5)固连,且处于两个摩擦辊轮的同一端,主动轮二与从动齿轮一相啮合,从动齿轮一与从动齿轮二相啮合。
8、进一步的,所述的爬行单元还包括两个并排且间隔设置的被动辊轮,两个所述的被动辊轮转动连接在中心安装口内,并处于两个摩擦辊轮之间,被动辊轮与摩擦辊轮围合出一个长方形的夹持区,机器人本体处于夹持区内。
9、进一步的,每个弯折转向输出单元包括一个引导环一和两根连杆;所述的引导环一套在机器人本体上;两根连杆对称布置在引导环一的左右两侧,并与两个支撑座一一对应设置;每根连杆的一端与引导环一对应的端部固定连接,每根连杆的另一端布置有一个扇形齿轮,所述的扇形齿轮通过销轴转动连接在对应的支撑座上;其中布置在同一个支撑座上的两个扇形齿轮啮合在一起,从而使得两个弯折转向输出单元之间通过扇形齿轮产生传动关系。
10、进一步的,每个支撑座上且处于两个扇形齿轮之间的位置处设置有两个相互啮合的传动齿轮,每个传动齿轮与其临近的扇形齿轮相互啮合。
11、进一步的,所述中间驱动机构轴向的两端分别布置有一个束型单元,所述的束型单元为环状结构,并套在机器人本体上;每个束型单元具有连接端和束型端;每个束型单元通过连接端与中间驱动机构的安装座固定连接;每个束型单元的束型端具有圆环形束型面,所述圆环形束型面的内径小于机器人本体的外径尺寸;且束型端的径向中分面与左右两侧相对应的扇形齿轮的铰接点的连线处于同一平面上。
12、进一步的,所述的制动单元为电磁离合器,所述的电磁离合器包括电磁发射端和吸合衔铁;其中转向制动单元中的电磁发射端连接在其中一个支撑座的顶端,转向制动单元中的吸合衔铁固定连接在中间驱动机构中的动力传输部一上;弯折制动单元中的电磁发射端连接在其中一个支撑座的底端,弯折制动单元中的吸合衔铁与中间驱动机构的安装座固连;所述电磁发射端与吸合衔铁距离能够调节。
13、进一步的,所述的尖端自生长机构包括尖端安装座、自缠绕卷轴、挤压驱动组件和引导环二;所述的自缠绕卷轴和挤压驱动组件安装在尖端安装座内,所述的引导环二固定安装在尖端安装座的前端面上;所述机器人本体的尖端依次穿过引导环二和挤压驱动组件并缠绕在自缠绕卷轴上,所述的机器人本体通过挤压驱动组件实现自生长和回缩;
14、所述的挤压驱动组件包括驱动电机、主动辊和被动辊;所述的驱动电机固定安装在尖端安装座内,并用于驱动主动辊的旋转;所述的主动辊和被动辊并排且转动安装在尖端安装座内,且主动辊与被动辊之间的轴间距能够调节;所述的主动辊和被动辊对机器人本体进行径向夹持。
15、进一步的,所述的自缠绕卷轴包括卷轴、恒拉力弹簧片和弹簧存储轴;所述的卷轴转动安装在尖端安装座内的两侧侧壁处,卷轴的一端伸出尖端安装座的一侧侧壁,所述的弹簧存储轴转动安装在尖端安装座外的侧壁处,并与卷轴的伸出端处于同一侧,其中卷轴与弹簧存储轴平行布置;所述恒拉力弹簧片的一端固定并缠绕在弹簧存储轴上,恒拉力弹簧片的另一端反向缠绕并固定在卷轴的伸出端上,同时对卷轴具有恒拉力。
16、本发明与现有技术相比产生的有益效果是:
17、1、本技术的外附关节为对称式结构,整体结构更加简单紧凑,防止外附关节出现偏载问题;且本技术利用两个电机驱动三种模式运动,由于爬行运动模式是由一个电机单独驱动实现,转向运动模式和弯折运动模式是由一个电机驱动实现,且爬行运动模式与转向和弯折运动模式不会产生干涉,故本技术的外附关节能够同时实现两自由度的复合运动。
18、2、本技术的中间驱动机构布置在外附关节的中间位置,并将动力输出部以及传动元件固定在外附关节的内部,可以有效保护传动元件。同时,中间驱动机构为一个多功能的集成元件,不仅是外附关节沿机器人本体轴线方向爬行的驱动元件,同时在两个制动单元的配合下还是外附关节实现转向与弯折功能的动力输出源,简化了驱动元件的复杂结构。
19、3、在机器人本体弯折过程中,本技术的两个弯折转向输出单元同时对机器人本体产生作用力,二者弯折角度的加和为机器人本体整体弯折的角度,不仅提高了机器人实现弯折运动的速率,还可以实现机器人大角度的弯折。
20、4、本技术的爬行单元围合出一个长方形的夹持区,机器人本体处于夹持区的部分受到径向挤压并呈现长方形状态,在机器人本体仅设置有一个弯折节点的情况下,机器人本体处于长方形夹持区的部分可以作为弯折节点,当机器人本体进行弯折运动时,可以选择弯折节点的长度方向与y轴方向相同,此时弯折节点直径的收缩有利于降低局部刚度,降低外附关节弯折所需的扭矩。另外,由于爬行单元与机器人本体之间为夹持作用,在爬行电机处于关闭/待机的状态下,爬行单元与机器人本体之间形成固定关系,从而使得中间驱动机构与机器人本体之间形成固定关系,在机器人本体做转向运动时,可以避免中间驱动机构受自身的反向作用力而使得爬行单元与机器人本体之间产生转向,进而保证了机器人本体转向的精度。
21、5、本技术通过两个弯折转向输出单元中传动组件的设计以及两个束型单元的设计增加了弯折节点的数量,且更加有利于创造机器人本体的弯折节点,使得机器人本体的弯折中心与外附关节的弯折中心等高,提高机器人本体弯折的精度,且不会在单一的弯折节点处产生较多的褶皱,影响软体机器人弯折角度的最大化。另外,由于束型单元的束形面为圆环形,且束形面的内径小于机器人本体的外径尺寸,故机器人本体的弯折节点处于均匀的收缩状态,降低了机器人本体弯折节点的局部刚度,进而降低外附关节弯折所需的扭矩,同时利用了圆周的同向性,使得软体机器人在进行弯折运动时,无论向哪一侧弯折输出的扭矩均相同。
22、6、由于本技术的制动单元为电磁离合器,且电磁离合器中的电磁发射端与吸合衔铁之间为分离式设计,在电磁离合器断电时,电磁发射端与吸合衔铁之间留有微小间隙,以保证电磁发射端与吸合衔铁可以相对转动;由于电磁离合器的制动效果是通过电磁对衔铁产生吸合力实现的,电磁发射端与吸合衔铁的距离越小制动效果越好,在电磁离合器通电时,通过橡胶垫片的弹性变形可调整电磁发射端和吸合衔铁之间的距离,使电磁发射端和吸合衔铁贴合,进而增加制动效果。
23、7、在确保目标位置的情况下,本技术将软体机器人的生长布置在尖端,机器人尖端的生长过程不会影响机器人其他部位(靠近末端和中间段等)的姿态,只需要改变靠近尖端的外附关节的弯折角度或者转向角度即可,其他部位的外附关节无需做出调整,可以简化关节部位的操作过程和尖端达到目标位置的解算过程,保证机器人尖端达到目标位置的精度。
24、8、本技术中的挤压驱动组件是机器人本体伸长或者回缩的动力源,同时在回缩时也将机器人本体中的气体尽量挤压出去,减小尖端薄管材料缠绕在自缠绕卷轴上的存储体积,和避免尖端自生长机构内的薄管由于内部充气导致体积较大,在缠绕或者释放过程产生卡死现象。
25、9、由于主动辊和被动辊的挤压,使得二者间隙处的薄管形状突变,刚度降低极易发生随机弯折,本技术通过引导环二避开低刚度区域,使新生长的充气式薄管的轴线方向与尖端自生长机构平行。
26、10、恒拉力弹簧片的设计,使多余的薄管承受拉力而张紧,能够在无驱动情况下使多余的薄管卷在卷轴上,减少尖端薄管材料的存储体积,同时薄管张紧有利于尖端自生长机构释放薄管材料,防止薄管折叠进入主动辊与被动辊的间隙之间而卡死,且尖端自生长机构可以为后续尖端负载提供安装平台,保证尖端负载连接的稳定性,和避免了尖端负载与机器人本体的相对移动所带来的复杂性运动。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49009.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表