电缆廊道中巡检机器人远程定位电缆的装置、方法及设备与流程
- 国知局
- 2024-07-05 17:54:41
本申请属于电力设施,具体涉及一种电缆廊道中巡检机器人远程定位电缆的装置、方法及设备。
背景技术:
1、电缆作为电能或信号的传输装置,在日常生活中有着不可或缺的重要作用。而电缆在使用过程中,不可避免地存在损坏的风险。为减小对电力系统的影响,需要对电缆进行巡检,及时发现异常并进行异常处理。
2、目前,很多电缆都铺设在电缆廊道中,常规的巡检方式是基于人工来巡检,在人工巡检过程中,巡检人员会根据线缆的编号或者固定位置,在多根电缆中确定需要关注的目标电缆,但是若采用机器人执行电缆的巡检任务,则在电缆分布密集时,会存在无法锁定目标电缆或目标电缆跟踪对象错误等问题,进而导致电缆异常部位的定位不准确,严重影响巡检结果的确定。
3、因此,如何能对巡检过程中的目标电缆位置进行校准,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、本申请实施例的目的是提供一种电缆廊道中巡检机器人远程定位电缆的装置、方法及设备,可以在识别到目标电缆存在位置切换特征时,根据初始位置以及位置切换特征更新目标电缆变化后的位置信息,有利于在巡检过程中对目标电缆的位置进行校准,避免因电缆位置的错乱,影响电缆异常定位的准确性。
2、第一方面,本申请实施例提供了一种电缆廊道中巡检机器人远程定位电缆的装置,所述装置包括:
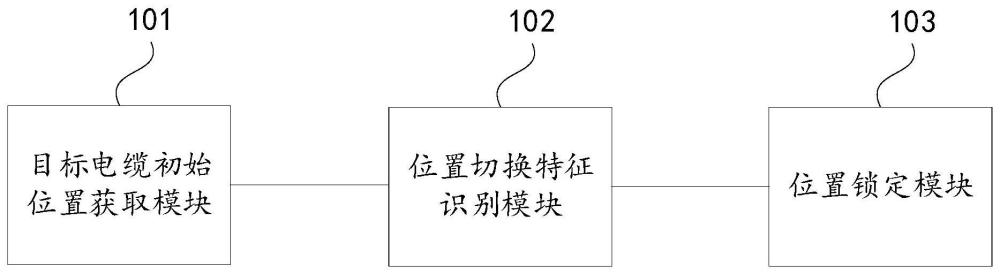
3、目标电缆初始位置获取模块,用于根据采集到的图像确定目标电缆的初始位置;
4、位置切换特征识别模块,用于识别目标电缆在延伸方向上是否存在与电缆廊道中的其他电缆相交叉的特征,若存在,则确定识别到位置切换特征;
5、位置锁定模块,用于根据所述位置切换特征,对所述目标电缆原有的位置进行更新,确定目标电缆在走线支架上面的更新位置。
6、进一步的,所述位置切换特征识别模块,还用于:
7、识别目标电缆在延伸方向上是否存在架设位置偏移的特征,若存在,则确定识别到位置切换特征。
8、进一步的,所述位置切换特征识别模块,具体包括:
9、图像输入单元,用于将采集到的图像输入至预先训练好的神经网络模型;
10、模型输出结果识别单元,用于通过所述神经网络模型输出分类结果以及每个分类结果所对应的概率值;其中,所述分类结果包括平直铺设、存在交叉以及存在平移中的至少一种;
11、特征识别单元,用于在存在交叉或者存在平移两种分类结果的概率值高于预设概率值的情况下,确定识别到存在交叉的位置切换特征或者存在平移的位置切换特征;在平直铺设的概率值高于预设概率值的情况下,确定识别到不存在位置切换特征。
12、进一步的,所述位置切换特征识别模块,还具体包括:
13、识别异常报告单元,用于在将采集到的图像输入至预先训练好的神经网络模型之后,通过所述神经网络模型的图像筛选网络识别所述图像的边缘信息,并在所述边缘信息不满足预设要求的情况下,生成识别结果为识别异常的报告信息。
14、进一步的,所述识别异常报告单元,具体用于:
15、在将采集到的图像输入至预先训练好的神经网络模型之后,通过所述神经网络模型的交叉电缆数量识别网络识别同一交叉位置的电缆数量是否大于两条,并在大于两条的情况下,生成识别结果为识别异常的报告信息。
16、进一步的,所述装置还包括:
17、拍摄位姿调整模块,用于根据所述目标电缆在走线支架上面的更新位置,确定所述巡检机器人的摄像头的位姿是否需要调整,以及在需要调整的情况下,确定所述摄像头的目标位姿。
18、进一步的,所述拍摄位姿调整模块,包括:
19、电缆数量识别单元,用于确定所述更新位置对应的走线支架上面的电缆数量;
20、目标位姿确定模块,用于根据所述目标电缆在所述走线支架上的更新位置,以及所述所述走线支架上面的电缆数量,确定目标位姿。
21、第二方面,本申请实施例提供了一种电缆廊道中巡检机器人远程定位电缆的方法,所述方法包括:
22、根据采集到的图像确定目标电缆的初始位置;
23、识别目标电缆在延伸方向上是否存在与电缆廊道中的其他电缆相交叉的特征,若存在,则确定识别到位置切换特征;
24、根据所述位置切换特征,对所述目标电缆原有的位置进行更新,确定目标电缆在走线支架上面的更新位置。
25、进一步的,识别目标电缆在延伸方向上是否存在与电缆廊道中的其他电缆相交叉的特征,若存在,则确定识别到位置切换特征,包括:
26、识别目标电缆在延伸方向上是否存在架设位置偏移的特征,若存在,则确定识别到位置切换特征。
27、第三方面,本申请实施例提供了一种电子设备,该电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第一方面所述的方法的步骤。
28、第四方面,本申请实施例提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如第一方面所述的方法的步骤。
29、第五方面,本申请实施例提供了一种芯片,所述芯片包括处理器和通信接口,所述通信接口和所述处理器耦合,所述处理器用于运行程序或指令,实现如第一方面所述的方法。
30、在本申请实施例中,目标电缆初始位置获取模块,用于根据采集到的图像确定目标电缆的初始位置;位置切换特征识别模块,用于识别目标电缆在延伸方向上是否存在与电缆廊道中的其他电缆相交叉的特征,若存在,则确定识别到位置切换特征;位置锁定模块,用于根据所述位置切换特征,对所述目标电缆原有的位置进行更新,确定目标电缆在走线支架上面的更新位置。通过上述电缆廊道中巡检机器人远程定位电缆的装置,可以在识别到目标电缆存在位置切换特征时,根据初始位置以及位置切换特征更新目标电缆变化后的位置信息,有利于在巡检过程中对目标电缆的位置进行校准,避免因电缆位置的错乱,影响电缆异常定位的准确性。
技术特征:1.一种电缆廊道中巡检机器人远程定位电缆的装置,其特征在于,所述装置包括:
2.根据权利要求1所述的电缆廊道中巡检机器人远程定位电缆的装置,其特征在于,所述位置切换特征识别模块,还用于:
3.根据权利要求1或2所述的电缆廊道中巡检机器人远程定位电缆的装置,其特征在于,所述位置切换特征识别模块,具体包括:
4.根据权利要求3所述的电缆廊道中巡检机器人远程定位电缆的装置,其特征在于,所述位置切换特征识别模块,还具体包括:
5.根据权利要求4所述的电缆廊道中巡检机器人远程定位电缆的装置,其特征在于,所述识别异常报告单元,具体用于:
6.根据权利要求1所述的电缆廊道中巡检机器人远程定位电缆的装置,其特征在于,所述装置还包括:
7.根据权利要求6所述的电缆廊道中巡检机器人远程定位电缆的装置,其特征在于,所述拍摄位姿调整模块,包括:
8.一种电缆廊道中巡检机器人远程定位电缆的方法,其特征在于,所述方法包括:
9.根据权利要求8所述的电缆廊道中巡检机器人远程定位电缆的方法,其特征在于,识别目标电缆在延伸方向上是否存在与电缆廊道中的其他电缆相交叉的特征,若存在,则确定识别到位置切换特征,包括:
10.一种电子设备,其特征在于,包括处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求8-9中任一项所述的电缆廊道中巡检机器人远程定位电缆的方法的步骤。
技术总结本申请公开了一种电缆廊道中巡检机器人远程定位电缆的装置、方法及设备,本申请属于电力设施技术领域。该装置包括:目标电缆初始位置获取模块,用于根据采集到的图像确定目标电缆的初始位置;位置切换特征识别模块,用于识别目标电缆在延伸方向上是否存在与电缆廊道内其他电缆交叉的特征,若存在,则确定识别到位置切换特征;位置锁定模块,用于根据位置切换特征,对目标电缆原有的位置进行更新,确定目标电缆在走线支架上面的更新位置。本技术方案,可以在识别到目标电缆存在位置切换特征时,根据初始位置以及位置切换特征更新目标电缆位置信息,有利于在巡检过程中对目标电缆的位置进行校准,避免因电缆位置的错乱,影响电缆异常定位的准确性。技术研发人员:魏豪兵,李奕军,杨绍军,张仕欢,徐兆良,谭智广受保护的技术使用者:广州番禺电缆集团(新兴)有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49623.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表