基于有限元离散和模态降阶的柔性机械臂控制方法及系统
- 国知局
- 2024-07-08 10:42:32
本发明涉及柔性机械臂控制,尤其涉及一种基于有限元离散和模态降阶的柔性机械臂控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、机械臂在智能制造、智能建造装备等领域具有广泛的应用,可有效替代人工进行重复性作业,从而提高生产作业效率与作业稳定性。随着机械臂朝着高速化、轻量化方向的发展,大量具有臂展长、质量轻等特性的机械臂得到了普及应用,此类机械臂往往由于连杆与关节刚度的不足而表现出一定的柔性,因此也被称为柔性机械臂。柔性机械臂在运行时产生的弹性变形以及振动将降低机械臂的定位精度与轨迹精度,在负载惯性大、运行速度高时尤为如此,使得其难以胜任精度要求较高的作业任务。
3、为提高柔性机械臂的精度,降低其弹性变形及振动所产生的不利影响,学术界与工业界对柔性机械臂振动控制展开了深入的研究,提出了多种弹性变形及振动抑制方法,在这些已有方法中,柔性机械臂的动力学模型的构建均发挥着重要作用,可进行机械臂运动轨迹规划、结构设计等工作,实现机械臂振动的抑制。
4、目前,假设模态法与有限元方法是柔性机械臂动力学建模领域中两种较为常用的方法,然而假设模态法对于柔性机械臂的几何形状与边界条件具有限制,而有限元方法所建立的动力学模型自由度较多,不利于柔性机械臂基于模型的实时控制。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于有限元离散和模态降阶的柔性机械臂控制方法及系统,通过有限元方法和假设模态法的组合,构建适用范围广、求解效率高的柔性机械臂动力学模型,可用于机械臂基于模型的速度/加速度反馈控制,从而实现对柔性单杆机械臂的振动的有效抑制和精确控制。
2、在一些实施方式中,采用如下技术方案:
3、一种基于有限元离散和模态降阶的柔性机械臂控制方法,包括:
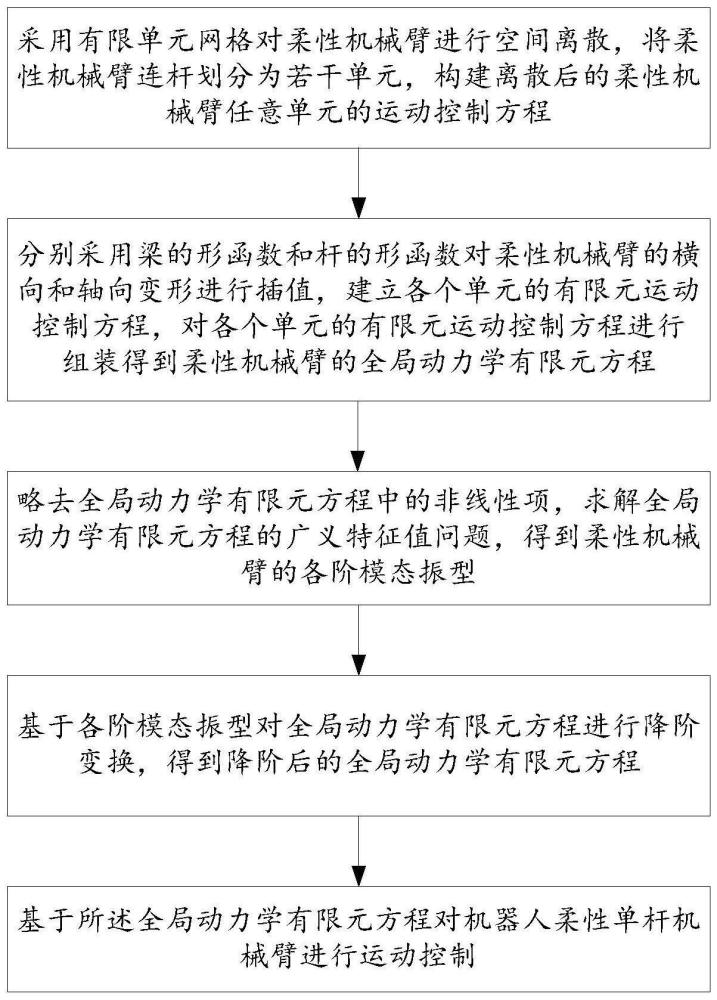
4、采用有限单元网格对柔性机械臂进行空间离散,将柔性机械臂连杆划分为若干单元;
5、采用哈密顿方程,构建离散后的柔性机械臂任意单元的运动控制方程;
6、分别采用梁的形函数和杆的形函数对柔性机械臂的横向和轴向变形进行插值,得到单元的有限元矩阵,建立各个单元的有限元运动控制方程;
7、对各个单元的有限元运动控制方程进行组装得到柔性机械臂的全局动力学有限元方程;
8、略去全局动力学有限元方程中的非线性项,求解全局动力学有限元方程的广义特征值问题,得到柔性机械臂的各阶模态振型;
9、基于所述的各阶模态振型对全局动力学有限元方程进行降阶变换,得到降阶后的全局动力学有限元方程;
10、基于所述全局动力学有限元方程对机器人柔性单杆机械臂进行运动控制。
11、在另一些实施方式中,采用如下技术方案:
12、一种基于有限元离散和模态降阶的柔性机械臂控制系统,包括:
13、单元划分模块,用于采用有限单元网格对柔性机械臂进行空间离散,将柔性机械臂连杆划分为若干单元;
14、运动控制方程构建模块,用于采用哈密顿方程,构建离散后的柔性机械臂任意单元的运动控制方程;
15、运动控制方程离散模块,用于分别采用梁的形函数和杆的形函数对柔性机械臂的横向和轴向变形进行插值,得到单元的有限元矩阵,建立各个单元的有限元运动控制方程;
16、全局动力学有限元方程构建模块,用于对各个单元的有限元运动控制方程进行组装得到柔性机械臂的全局动力学有限元方程;
17、全局动力学有限元方程求解模块,用于略去全局动力学有限元方程中的非线性项,求解全局动力学有限元方程的广义特征值问题,得到柔性机械臂的各阶模态振型;基于所述的各阶模态振型对全局动力学有限元方程进行降阶变换,得到降阶后的全局动力学有限元方程;
18、机械臂控制模块,用于基于所述全局动力学有限元方程对机器人柔性单杆机械臂进行运动控制。
19、在另一些实施方式中,采用如下技术方案:
20、一种机器人控制器,其包括处理器和存储器,处理器用于实现指令;存储器用于存储多条指令,所述指令适于由处理器加载并执行上述的基于有限元离散和模态降阶的柔性机械臂控制方法。
21、在另一些实施方式中,采用如下技术方案:
22、一种机器人,采用上述的基于有限元离散和模态降阶的柔性机械臂控制方法,实现对单杆柔性机械臂的运动控制。
23、与现有技术相比,本发明的有益效果是:
24、(1)本发明有效集成了柔性机械臂建模领域中有限元方法与假设模态法的优势,也即类似于有限元方法,可应用于各类复杂形状的柔性机械臂,同时类似于假设模态法可建立维度较小的动力学控制方程,利于柔性机械臂实时控制的实现。
25、(2)本发明可求取得到柔性机械臂的全局模态振型,并得到降阶的机械臂动力学模型,通过将机械臂动力学模型嵌入控制器中作为前馈信号,可为柔性机械臂振动的抑制、路径规划、速度/加速度规划等提供指导,从而实现对柔性机械臂的振动的有效抑制和精确控制。
26、本发明的其他特征和附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本方面的实践了解到。
技术特征:1.一种基于有限元离散和模态降阶的柔性机械臂控制方法,其特征在于,包括:
2.如权利要求1所述的一种基于有限元离散和模态降阶的柔性机械臂控制方法,其特征在于,采用哈密顿方程,构建离散后的柔性机械臂任意单元的运动控制方程,具体为:
3.如权利要求1所述的一种基于有限元离散和模态降阶的柔性机械臂控制方法,其特征在于,分别采用梁的形函数和杆的形函数对柔性机械臂的横向和轴向变形进行插值,得到离散后的单元的有限元矩阵,建立各个单元的有限元运动控制方程,具体为:
4.如权利要求3所述的一种基于有限元离散和模态降阶的柔性机械臂控制方法,其特征在于,对各个单元的有限元运动控制方程进行组装得到柔性机械臂的全局动力学有限元方程,具体为:
5.如权利要求4所述的一种基于有限元离散和模态降阶的柔性机械臂控制方法,其特征在于,所述全局动力学有限元方程中的非线性项为柔性机械臂的阻尼阵c(t)和非线性力对应的列向量g(t)。
6.如权利要求1所述的一种基于有限元离散和模态降阶的柔性机械臂控制方法,其特征在于,略去全局动力学有限元方程中的非线性项后,得到全局动力学有限元方程的广义特征值方程如下:
7.如权利要求1所述的一种基于有限元离散和模态降阶的柔性机械臂控制方法,其特征在于,基于所述的各阶模态振型对全局动力学有限元方程进行降阶变换,得到降阶后的全局动力学有限元方程,具体为:
8.一种基于有限元离散和模态降阶的柔性机械臂控制系统,其特征在于,包括:
9.一种机器人控制器,其包括处理器和存储器,处理器用于实现指令;存储器用于存储多条指令,其特征在于,所述指令适于由处理器加载并执行权利要求1-7任一项所述的基于有限元离散和模态降阶的柔性机械臂控制方法。
10.一种机器人,其特征在于,采用权利要求1-7任一项所述的基于有限元离散和模态降阶的柔性机械臂控制方法,实现对单杆柔性机械臂的运动控制。
技术总结本发明公开了一种基于有限元离散和模态降阶的柔性机械臂控制方法及系统,包括:将柔性机械臂连杆划分为若干单元;构建离散后的柔性机械臂任意单元的运动控制方程;建立各个单元的有限元运动控制方程,对各个单元的有限元运动控制方程进行组装得到柔性机械臂的全局动力学有限元方程;求解全局动力学有限元方程的广义特征值问题,得到柔性机械臂的各阶模态振型;基于各阶模态振型对全局动力学有限元方程进行降阶变换,得到降阶后的全局动力学有限元方程;基于全局动力学有限元方程对机器人柔性单杆机械臂进行运动控制。本发明可以实现对柔性机械臂的振动的有效抑制和精确控制。技术研发人员:刘知辉,孙子正,秦承帅,刘洪亮,孙希龙受保护的技术使用者:山东大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49808.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表