手持式工具机的制作方法
- 国知局
- 2024-07-08 10:42:29
本发明涉及一种根据权利要求1的手持式工具机。
背景技术:
1、从cn206855337u中已知一种手持式工具机,其具有用于显示手持式工具机的状态的显示器。
技术实现思路
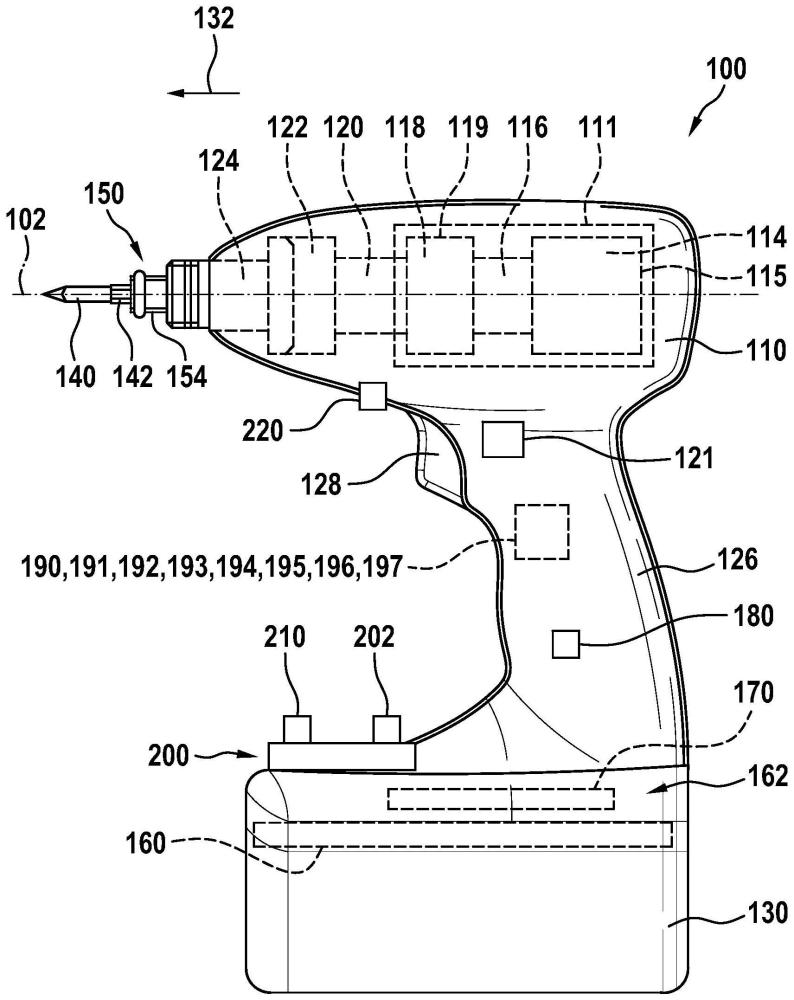
1、本发明描述一种手持式工具机,其具有壳体、驱动马达、手动开关、供能单元和至少一个照明元件,所述驱动马达具有驱动轴,所述手动开关用于操纵驱动马达,所述供能单元用于至少给驱动马达供能,所述照明元件用于照亮工作区域。提出,设置至少一个传感器元件,所述传感器元件构造为用于控制照明元件。
2、本发明提供了一种手持式工具机,借助该手持式工具机,能够通过传感器元件控制照明元件来提升用户便利性。
3、手持式工具机能够构造为电动地或气动地运行的手持式工具机。电动地运行的手持式工具机在此能够构造为电网运行或蓄电池运行的手持式工具机。例如,手持式工具机能够构造为螺钉机、压缩空气螺钉机、钻孔螺钉机、旋转冲击式螺钉机、锤、钻锤、压缩空气旋转冲击式螺钉机或者冲击钻孔螺钉机。
4、壳体能够构造为具有例如两个半罩的罩式壳体。壳体能够例如手枪形或t形地构造。壳体接收至少一个驱动单元。驱动单元包括驱动马达和传动装置。驱动马达能够构造为电换向驱动马达、尤其构造为至少一个电动机。驱动马达具有驱动轴,其中,驱动马达能够将驱动轴置于转动中。驱动马达被构型为,使得它能够通过手动开关被操纵。如果手动开关由用户操纵,则接通驱动马达并且手持式工具机投入运行。如果相应地手动开关没有由用户进一步操纵,则关断驱动马达。优选,驱动马达能够被电子控制和/或调节,使得能够实现逆向运行和希望的旋转速度的预给定值。在逆向运行中,驱动马达能够在顺时针旋转方向和逆时针旋转方向之间切换。为了切换逆向运行中的驱动马达,手持式工具机能够具有旋转方向切换元件、尤其是旋转方向切换开关。驱动马达构造为用于通过驱动轴来驱动传动装置。传动装置构造为用于驱动工具接收部。传动装置能够构造为至少一个行星齿轮传动装置,其中,所述传动装置例如能够是可切换的。行星齿轮传动装置能够具有至少一个行星级。手持式工具机具有工具轴线。驱动轴在转动中能够构造转动轴线。在此,驱动轴的转动轴线能够构造工具轴线。
5、手持式工具机能够具有冲击机构,该冲击机构构造为用于在冲击运行中运行。冲击机构在冲击运行期间产生高扭矩峰值,以便因此松脱固定的连接器件或紧固连接器件。冲击机构能够与工具接收部连接。冲击机构能够例如构造为转动冲击机构、旋转冲击机构或v形槽冲击机构。手持式工具机能够具有中间轴。中间轴能够与传动装置连接,使得传动装置能够驱动中间轴。然后,中间轴能够驱动冲击机构。驱动轴通过传动装置、中间轴、可选的冲击机构来驱动工具接收部。传动装置能够轴向地布置在驱动马达与冲击机构之间。此外,中间轴能够轴向地布置传动装置与冲击机构之间。冲击机构能够轴向地布置在驱动马达与工具接收部之间。在此,“轴向”应被理解为沿着工具轴线。“径向”应被理解为基本上垂直于工具轴线。
6、工具接收部能够构造为工具内接收部、例如批头接收部和/或构造为工具外接收部、例如槽接收部。也可设想,工具接收部构造为钻夹头。工具接收部能够接收插入式工具,例如螺钉批头或套筒扳手,从而用户能够建立紧固元件与紧固载体的螺纹连接。
7、附加地,手持式工具机包括供能单元,该供能单元至少构造为用于给驱动马达供能。供能单元设置为用于借助蓄电池、尤其手持式工具机蓄电池包来进行蓄电池运行和/或设置为用于电网运行。在一个优选的实施方式中,供能单元构造为用于蓄电池运行。在本发明的范畴内,“手持式工具机蓄电池包”应被理解为至少一个蓄电池单池和蓄电池包壳体的联合。手持式工具机蓄电池包以有利的方式构造为用于给商业上通用的、蓄电池运行的手持式工具机供能。该至少一个蓄电池单池例如能够构造为具有3.6v的额定电压的锂离子蓄电池单池。示例性,手持式工具机蓄电池包能够包括至多十个蓄电池单池,其中,也可设想其他数量的蓄电池单池。作为蓄电池运行的手持式工具机的实施方式以及作为电网驱动的手持式工具机的运行对于本领域技术人员而言是充分已知的,因此在这里不对供能的细节进行探讨。
8、在一个实施方式中,壳体具有供能单元的至少一个供能保持装置、尤其是手持式工具机蓄电池包保持装置,用户界面布置在该供能单元上。尤其地,供能保持装置构造为用于保持、尤其是接收供能单元、尤其手持式工具机蓄电池包。附加地,供能保持装置设置为用于将供能单元、尤其是手持式工具机蓄电池包以能无工具松脱的方式与壳体连接并且确保手持式工具机的供能单元。该供能保持装置与所连接的手持式工具机蓄电池包构成具有至少一个支立面的至少一个支脚。尤其地,手持式工具机能够借助支脚支承、尤其是放置在支立面上。此外,壳体包括手柄。手柄构造为用于由用户抓握,以使用手持式工具机。供能保持装置尤其布置在手柄上。
9、手持式工具机能够具有控制单元。控制单元至少构造为用于控制驱动马达。此外,控制单元能够布置在壳体中,例如在手持式工具机的手柄中或者在供能接口的区域中。控制单元能够包括至少一个微处理器或微控制器。用户界面布置在壳体上。用户界面能够是在用户与手持式工具机之间的界面。用户界面具有至少一个操作元件,该至少一个操作元件构造为用于接收用户的输入。以有利的方式,操作元件至少用于调设或激活至少所述照明元件和/或手持式工具机的功能。可设想,操作元件也能够用于调设能由用户分配的运行模式。当用户操纵操作元件时,用户界面将用户的输入传递至控制单元。接着,控制单元例如控制驱动马达。
10、传感器元件布置在壳体中和/或上。此外,传感器元件与控制单元连接、尤其电连接。传感器元件构造为用于感测参数。在此,传感器元件能够根据所感测的参数来控制照明元件。
11、在手持式工具机的一个实施方式中,设置另外的照明元件,该另外的照明元件布置在壳体的、不同于所述照明元件的区域上。基于所述另外的照明元件,手持式工具机具有布置在壳体的两个不同的区域上的两个照明元件。由此,能够实现工作区域、尤其是在工具接收部前方的工作区域的优化照明。照明元件和另外的照明元件分别包括至少一个光元件(例如led)和至少一个光导元件(例如透镜)。照明元件分别布置在壳体上,使得它们能够在朝向工作区域的方向上射出光。两个照明元件彼此间隔开地布置在壳体上。
12、在手持式工具机的一个实施方式中,传感器元件构造为用于控制所述另外的照明元件。因此,除了控制所述照明元件之外,传感器元件还构造为用于控制所述另外的照明元件。相应地,传感器元件构造为用于根据所感测的参数来控制另外的照明元件。
13、在手持式工具机的一个实施方式中,传感器元件构造为光传感器,该光传感器构造为用于借助光测量来控制照明元件。光传感器能够布置在壳体中和/或上。此外,能够将光传感器布置在支脚和上/或用户界面上和/或驱动马达的区域中。光传感器构造为用于,测量手持式工具机的工作环境中的光并且根据光测量来控制、尤其是调暗、打开或关闭所述照明元件。由此,能够自动地激活所述照明元件。所述光传感器也能够相应地控制所述另外的照明元件。如果例如阻挡两个照明元件中的一个照明元件中的光,则光传感器能够相应地控制另外的照明元件,以提供工作环境的优化照亮。由此能够实现自动关闭。可设想,光传感器构造为用于手势控制。在此,然后光传感器沿与两个照明元件相反的方向布置,以避免两个照明元件以不希望的方式照亮光传感器。借助手势控制,可设想两个照明元件能够分别被调暗和/或接通和关断。作为手势例如可设想挥手或抚过。
14、在手持式工具机的一个实施方式中,传感器元件构造为噪音传感器,该噪音传感器构造为用于借助噪音测量来控制所述照明元件。所述噪音其也能够控制所述另外的照明元件。噪音传感器能够布置在壳体中和/或上。此外能够将噪音传感器布置在支脚和上/或用户界面上和/或驱动马达的区域中。噪音传感器构造为用于,测量手持式工具机的工作环境中的噪音并且根据噪音测量来控制、尤其是调暗、打开或关闭两个照明元件。例如,作为噪音测量能够测量工作环境中的噪声级或噪音水平。例如,噪音能够是拍手或语音识别。因此,可设想两个照明元件能够借助拍手来激活。
15、在手持式工具机的一个实施方式中,传感器元件构造为加速度传感器,该加速度传感器构造为用于借助加速度测量来控制所述照明元件。所述加速度传感器也能够控制所述另外的照明元件。加速度传感器能够布置在壳体中和/或上。此外能够将加速度传感器布置在支脚和上/或用户界面上和/或驱动马达的区域中。加速度传感器构造为用于,测量手持式工具机的、尤其壳体的加速度并且根据加速度测量来控制、尤其是调暗、打开或关闭两个照明元件。作为示例性的加速度可以是敲击壳体,使得能够根据敲击激活两个照明元件。进一步,加速度传感器借助加速度测量来感测手持式工具机的跌落并且作为对其的反应这样地激活两个照明元件,以便在混乱的环境中更好地找到手持式工具机。如果手持式工具机具有冲击机构,则可设想,由于手持式工具机的振动并且在紧固器件旋入到工件中时,在工件中存在紧固器件的头部靠置和/或端部止挡的情况下,两个照明元件分别发光,以便向用户显示所述头部靠置或所述端部止挡。
16、在手持式工具机的一个实施方式中,传感器元件构造为距离传感器,该距离传感器构造为用于借助距离测量来控制所述照明元件。所述距离传感器也能够控制所述另外的照明元件。距离传感器能够布置在壳体中和/或上。此外能够将距离传感器布置在支脚和上/或用户界面上和/或驱动马达的区域中。距离传感器构造为用于,测量手持式工具机、尤其是工具接收部与工作面的至少一个距离,并且根据距离测量来控制、尤其是调暗、打开或关闭两个照明元件。可行的是,在手持式工具机的运行期间基本上永久地执行距离测量。由此,例如能够识别出紧固器件齐平地拧入到工作面中,如果例如工具接收部与工作面之间的距离基本上保持不变。作为对齐平的拧入的反应,例如,两个照明元件中的至少一个照明元件能够发光或闪烁。也可设想,如果识别出齐平的拧入,则距离传感器借助控制单元关断手持式工具机。当将紧固器件从工作面中拧出时,可行的是,距离传感器在距工作面的预定义的距离处开始闪烁和/或关断手持式工具机,以避免紧固器件掉落。由此,能够实现自动关断。可设想,借助外部控制单元(例如智能手机和应用程序)能够调设紧固器件到工作面中的拧入深度、尤其是从工具接收部至工作面的预定义的距离。一旦达到拧入深度,则可行的是,两个照明元件中的至少一个照明元件开始闪烁和/或手持式工具机关断。由此,能够实现自动的拧入深度识别。
17、在手持式工具机的一个实施方式中,传感器元件构造为电流传感器,该电流传感器构造为用于借助电流测量来控制所述照明元件。所述电流传感器也能够控制所述另外的照明元件。电流传感器能够布置在壳体中和/或上。此外能够将电流传感器布置在支脚和上/或用户界面上和/或驱动马达的区域中。电流传感器构造为用于,测量手持式工具机的至少一个电流并且根据电流测量来控制、尤其是调暗、打开或关闭两个照明元件。例如,如果钻出引导电流的线路,则能够测量工具接收部和/或传动装置的电流流动。一旦测量出工具接收部和/或传动装置的电流流动,则两个照明元件中的至少一个照明元件能够开始闪烁,例如也借助颜色开始闪烁,以向用户显示警告。由此,能够实现电流警告器。进一步,电流传感器例如能够感测驱动马达和/或供能装置的临界电流增加。接着,两个照明元件中的至少一个照明元件能够开始闪烁,以向用户指示所述临界电流增加。由此,能够实现过载警告器。
18、在手持式工具机的一个实施方式中,传感器元件构造为温度传感器,该温度传感器构造为用于借助温度测量来控制所述照明元件。所述温度传感器也能够控制所述另外的照明元件。温度传感器能够布置在壳体中和/或上。此外能够将温度传感器布置在支脚和上/或用户界面上和/或驱动马达的区域中。温度传感器构造为用于,测量手持式工具机、尤其是壳体、手柄、传动装置、驱动马达和/或冲击机构的温度,并且根据温度测量来控制、尤其是调暗、打开或关闭两个照明元件。如果温度传感器求取出超过了能调设的极限温度,则两个照明元件中的至少一个照明元件能够开始闪烁。也可设想,具有一种颜色的两个照明元件中的至少一个照明元件开始闪烁,以向用户显示超过极限温度。由此,能够实现触摸警告器。
19、在手持式工具机的一个实施方式中,传感器元件构造为光时传感器(lichtzeitsensor),该光时传感器构造为用于借助光时测量来控制所述照明元件。所述光时传感器也能够控制所述另外的照明元件。光时传感器能够布置在壳体中和/或上。此外能够将光时传感器布置在支脚和上/或用户界面上和/或驱动马达的区域中。光时传感器构造为用于,测量光时。在此,光时是来自手持式工具机的所发射的光束作为经反射的光束到达该手持式工具机所需的时间。根据光时测量,能够控制、尤其是调暗、打开或关闭两个照明元件。因此,例如能够借助光时测量求取出插入式工具。由此,根据插入式工具的轴向长度能够在此控制两个照明元件,以实现工作面的最佳照明。在此,然后能够调设照明角度、照明强度、漫射光和/或点状光。此外,例如在识别出插入式工具之后,能够调设运行模式、驱动马达的转速、驱动马达的扭矩和/或过载保护。根据运行模式,例如,控制单元能够将两个照明元件中的至少一个照明元件优化地调设为用于一种应用情况。进一步,根据光时测量能够求取从工具接收部到工作面的距离。因此,借助光时测量也能够求取工作面中的开口以及工作面的特性。
20、在一个实施方式中,照明元件之一布置在手动开关上方。在此,照明元件之一能够在工具轴线上方或下方布置在壳体上。此外,照明元件之一能够沿围绕工具轴线的周向方向在手动开关上方布置在壳体上。
21、在一个实施方式中,照明元件之一布置在手动开关上方和驱动马达、尤其是驱动轴下方。照明元件之一能够尤其径向地布置驱动马达与手动开关之间。
22、在一个实施方式中,照明元件之一布置在手动开关下方和供能单元上方。在此,所述照明元件中的这一个照明元件能够尤其径向地布置在手动开关与供能单元之间。所述照明元件中的这一个照明元件布置在供能保持装置上方。
23、在一个实施方式中,两个照明元件基本上具有不同的辐射方向。所述照明元件之一能够具有基本上平行于工具轴线的辐射方向。所述照明元件之一能够具有横向于工具轴线的辐射方向。
24、在一个实施方式中,两个照明元件的辐射方向包围出在15°至45°的范围中的射束角。两个照明元件能够分别包括一个中心束,使得这两个中心束包围出在15°至45°的范围中的射束角。该射束角也能够在20°至40°、尤其是25°至35°的范围内。
25、在一个实施方式中,两个照明元件的射束交点在40mm至90mm的范围内尤其是轴向地与工具接收部间隔开。两个照明元件的中心束能够在射束交点相交。两个照明元件布置在壳体上,使得两个照明元件的中心束在射束交点相交。在此,射束交点能够位于工具轴线的轴向延长部上,使得射束交点能够轴向地沿着工具轴线的轴向延长部在40mm至90mm的范围内与工具接收部间隔开。因此,射束交点能够位于工具接收部前方、手持式工具机之外。射束交点布置成在40mm至90mm、尤其是50mm至80mm、完全尤其是59mm至70mm的范围内与工具接收部间隔开。
26、在一个实施方式中,两个照明元件具有在5mm至35mm的范围内的彼此之间的轴向距离。该轴向距离能够是相对于工具轴线的。两个照明元件的轴向距离能够在相应的光导元件之间。在两个照明元件之间的轴向距离在5mm至35mm、尤其是7mm至30mm、完全尤其是9mm至27mm的范围内。
27、在一个实施方式中,两个照明元件具有在100mm至220mm的范围内的彼此的径向距离。该径向距离能够是相对于工具轴线的。除了径向距离之外,两个照明元件还能够具有彼此的轴向距离,使得它们径向和轴向彼此错开地布置在手持式工具机的壳体上。彼此的径向距离在100mm至220mm、尤其是110mm至200mm的范围内。
28、在一个实施方式中,两个照明元件能够基本上彼此独立地被控制。除了控制驱动马达之外,控制单元还构造为用于控制两个照明元件。因此,控制单元可以根据用户的需要基本上彼此独立地控制两个照明元件。
29、在一个实施方式中,两个照明元件能够借助外部控制单元来控制。为了与外部控制单元进行通信,手持式工具机具有通信单元。该通信单元能够布置在壳体中。在本发明的范畴内,通信单元构造为用于建立与至少外部控制单元的通信连接并且发送和/或接收通信信号。通信信号能够以导线连接的方式通过电线连接或者通过在电路板上的导体轨来传输,和/或,通信信号能够被无线地传送。在此,通信信号的无线传送能够呈蓝牙、wlan、红外、借助rfid技术的近场通信(nfc)的形式,也能够是本领域技术人员熟悉的通信信号的其他无线传送。在此,所使用的通信协议能够是bluetooth smart、gsm、umts、lte、ant、zigbee、lora、sigfox、nb-lot、ble、irda以及本领域技术人员熟悉的其他通信协议。因此,通信连接可以是无线的或有线连接的。手持式工具机的通信单元与控制单元电连接。外部控制单元能够例如构造为智能手机,该智能手机具有用于控制的应用程序。外部控制单元构造为用于,向手持式工具机的通信单元发送控制指令。通信单元能够接收控制指令并且将所述控制指令传递至手持式工具机的控制单元。控制单元又能够将控制指令传递至相应的照明元件。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49801.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表