一种工业机器人制造用夹持装置的制作方法
- 国知局
- 2024-07-08 10:42:27
本技术涉及工业机器人制造,具体为一种工业机器人制造用夹持装置。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动,在工业机器人制造的过程中,往往需要利用工作台对制造所需的零件进行加工,在加工的过程中,需要通过夹持装置对零件夹紧固定。
2、目前现有的夹持装置虽被夹持住,但是不能保证待夹持的工件能稳定的夹持,在移动的过程中由于振动导致的不稳定性会很容易造成夹持松弛,使得零件脱落而受损。
技术实现思路
1、本实用新型的目的在于提供了一种工业机器人制造用夹持装置,达到解决以上技术问题的目的。
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人制造用夹持装置,包括有:
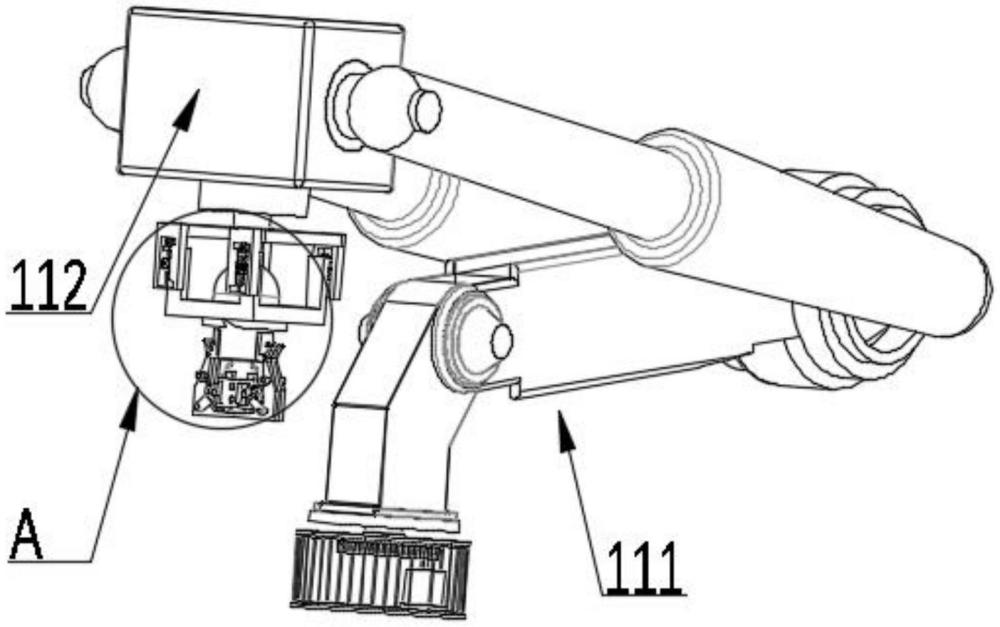
3、工业机器人主体,设置在所述工业机器人主体上的臂头块;
4、设置在所述臂头块底部的夹持组件;
5、所述夹持组件包括有:
6、转动连接在臂头块底部的缓冲部位;
7、以及设置在所述缓冲部位底部的夹持部位。
8、优选的,缓冲部位包括有:
9、连接顶板,通过轴承转动连接在臂头块的底部;
10、连接槽臂,一体连接在连接顶板的侧面;
11、凹凳块,设置于连接顶板的正下方。
12、优选的,所述连接槽臂的内壁一侧一体连接有齿块,所述凹凳块的顶部一体连接有连接块,所述连接块设置在连接槽臂的内部,且连接块的顶部与连接槽臂的内壁顶部之间固定连接有连接弹簧。
13、优选的,所述凹凳块的外壁活动安装有与齿块相啮合的齿轮。
14、优选的,所述夹持部位包括有:
15、连接柱,固定安装在凹凳块的中间位置处;
16、负压泵,固定安装在连接柱的底部;
17、安装座,固定安装在负压泵的外壁两侧;
18、伸缩杆,固定安装在安装座的外壁;
19、负压组件,设置在连接臂之间。
20、优选的,所述安装座的底部一侧一体连接有引脚孔体,且引脚孔体之间活动安装有两组夹持外臂,所述夹持外臂的顶端与伸缩杆的伸缩端端部活动连接。
21、优选的,所述夹持外臂的外壁活动安装有液压杆、伸缩气缸;所述液压杆的伸缩端端部活动安装有连接臂,所述伸缩气缸的伸缩端端部活动安装在连接臂上。
22、优选的,所述负压组件包括有夹持盘、负压管,所述夹持盘一体连接在连接臂之间,所述夹持盘开设有两个负压气嘴口,所述负压管的一端与负压气嘴口连通设置,所述负压管的另一端与负压泵的输出端连通设置。
23、本实用新型提供了一种工业机器人制造用夹持装置。具备以下有益效果:
24、(1)、本实用新型通过设计凹凳块,由于凹凳块上的齿轮与齿块相啮合,便于凹凳块在连接槽臂上进行升降,其中通过在连接块的顶部与连接槽臂的内壁顶部之间固定连接有连接弹簧,起到了缓减的作用,由于齿轮与齿块之间有摩擦,因而可以带来一定的阻力,使得工业机器人在移动的过程中,可以避免在移动的过程中由于振动导致的不稳定性会很容易造成夹持松弛,使得零件脱落而受损。
25、(2)、本实用新型通过利用伸缩杆的伸、缩,从而带动两组夹持外臂相互抵紧,使得待夹持工件可以安置在夹持外臂上,然后通过启动伸缩气缸,伸缩气缸在液压杆的活动作用下,带动连接臂对待夹持工件进行夹持,然后通过利用负压泵,负压泵运行,在气压差的原理下,负压气嘴口处形成负压区域,并形成定向、稳定的气流带,沿着负压管流通,使得将夹持工件进行牢固的吸附住,达到了稳定的夹持效果。
技术特征:1.一种工业机器人制造用夹持装置,其特征在于,包括有:
2.根据权利要求1所述的一种工业机器人制造用夹持装置,其特征在于:缓冲部位(21)包括有:
3.根据权利要求2所述的一种工业机器人制造用夹持装置,其特征在于:所述连接槽臂(212)的内壁一侧一体连接有齿块(213),所述凹凳块(214)的顶部一体连接有连接块(215),所述连接块(215)设置在连接槽臂(212)的内部,且连接块(215)的顶部与连接槽臂(212)的内壁顶部之间固定连接有连接弹簧(216)。
4.根据权利要求2所述的一种工业机器人制造用夹持装置,其特征在于:所述凹凳块(214)的外壁活动安装有与齿块(213)相啮合的齿轮(217)。
5.根据权利要求1所述的一种工业机器人制造用夹持装置,其特征在于:所述夹持部位(22)包括有:
6.根据权利要求5所述的一种工业机器人制造用夹持装置,其特征在于:所述安装座(223)的底部一侧一体连接有引脚孔体,且引脚孔体之间活动安装有两组夹持外臂(225),所述夹持外臂(225)的顶端与伸缩杆(224)的伸缩端端部活动连接。
7.根据权利要求6所述的一种工业机器人制造用夹持装置,其特征在于:所述夹持外臂(225)的外壁活动安装有液压杆(226)、伸缩气缸(228);所述液压杆(226)的伸缩端端部活动安装有连接臂(227),所述伸缩气缸(228)的伸缩端端部活动安装在连接臂(227)上。
8.根据权利要求5所述的一种工业机器人制造用夹持装置,其特征在于:所述负压组件(229)包括有夹持盘(2291)、负压管(2293),所述夹持盘(2291)一体连接在连接臂(227)之间,所述夹持盘(2291)开设有两个负压气嘴口(2292),所述负压管(2293)的一端与负压气嘴口(2292)连通设置,所述负压管(2293)的另一端与负压泵(222)的输出端连通设置。
技术总结本技术涉及工业机器人制造技术领域,且公开了一种工业机器人制造用夹持装置,包括有:工业机器人主体,设置在所述工业机器人主体上的臂头块;设置在所述臂头块底部的夹持组件;所述夹持组件包括有:转动连接在臂头块底部的缓冲部位。通过利用伸缩杆的伸、缩,从而带动两组夹持外臂相互抵紧,使得待夹持工件可以安置在夹持外臂上,然后通过启动伸缩气缸,伸缩气缸在液压杆的活动作用下,带动连接臂对待夹持工件进行夹持,然后通过利用负压泵,负压泵运行,在气压差的原理下,负压气嘴口处形成负压区域,并形成定向、稳定的气流带,沿着负压管流通,使得将夹持工件进行牢固的吸附住,达到了稳定的夹持效果。技术研发人员:李天琪,杨飞受保护的技术使用者:辽宁骐迹科技有限公司技术研发日:20231007技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49796.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表