一种基于MCD的码垛机器人数字孪生方法
- 国知局
- 2024-07-08 10:42:32
本发明涉及一种机器人数字孪生方法,具体涉及一种基于mcd的码垛机器人数字孪生方法。
背景技术:
0、技术背景
1、智能制造必将是中国产业转型乃至未来发展的重要组成部分,对于高端制造业的创新,能源节约以及生产方式转变等方面具有巨大影响。工业机器人作为智能制造领域中的核心产品之一,起着极其重要的作用,其应用领域涉及各行各业,如物料码垛、加工制造、汽车生产、汽车喷涂、高效焊接、军事活动、航空航天、医疗领域和服务行业等。由于这些生产全部交于机器人来完成,管理者并不能直接了解到在某一时刻生产情况,以及不能直观的了解到机器人的实施工况,这都有可能会导致生产失控,严重时将产生重大安全事故。由此产生了新模式和新业态的制造业数字化转型方法——智能制造,而数字孪生技术是智能制造中一个重要的方法。
技术实现思路
1、本发明的目的在于提供一种基于mcd的码垛机器人数字孪生方法,该方法应用了mechatronics concept designer(机电概念设计),对机器人连接的plc进行信号采集,在虚拟世界中完成物理世界真实装配生产线的映射,反映机器热的真实状况,同时还将数字孪生理论基础与plc数据结合将数字孪生体与机器人进行数据交互,可以观察机器人在生产的情况和以及生产数据,以及在发生故障停止时,可以提供更为准确的数据以供管理者对生产做出更为准确的决策。
2、本发明采用下述技术方案:
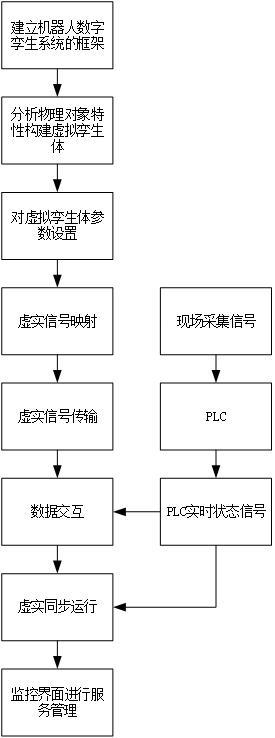
3、一种基于mcd的码垛机器人数字孪生方法,所述方法构建机器人物理体的数字孪生体,数字孪生体对物理体提取数据并根据实时状况进行监控,具体包括以下步骤:
4、1)建立生产线数字孪生系统的五维结构模型,包括物理对象、虚拟孪生体连接、数据和服务系统;
5、2)通过solid works、nx mcd软件构建生产线数字孪生体,并在机电一体化(mcd)模块完成孪生体物理特性及运动参数的配置;
6、3)配置孪生体端输入信号与输出信号的信号适配器;
7、4)配置机器人数字孪生系统的信号映射机制,将nx mcd中对应机电信号与plc控制信号的信号映射,建立物理体与孪生体的信号映射;
8、5)通过在opc建立实际工作站与数字孪生体之间的连接通讯:在opc中添加与nxmcd中对应机电信号中相同的信号,并定义信号的输入输出类型,在opc中选择连接的plc型号以及通讯类型,在运行时,实际工作站中的信号需先被计算机采集到opc服务器中,然后通过opc服务器与仿真软件建立通讯,此时才可以使机器人与孪生体建立信号通讯并保持同步;
9、6)机器人执行搬运操作,并比较判断机器人信号与孪生体中的仿真信号:将仿真软件中孪生体和实际工作站同时启动,机器人开始搬运第一个工件,可以观测到实际机器人和孪生体在运行相同的流程,同时比较机器人信号和孪生体与之对应的仿真信号,仿真信号正常情况下按照机器人运行的预期效果进行对应变化,搬运完一个工件继续循环进行下一个工件搬运,当所有工件搬运完成时,停止机器人和3d模型工作,若当机器人故障或运行时抓取的工件脱落时,孪生体的仿真信号与实际机器人传输来的信号出现不一致,则会返回数据并停机待修;
10、7)机器人与孪生体停机待修后故障查找:当孪生体的仿真信号与实际机器人传输来的信号出现不一致导致停机待修时,比较机器人和孪生体的姿态和位置可以迅速判断出故障原因。
11、所述的一种基于mcd的码垛机器人数字孪生方法,所述运动参数的配置包括相关参数设置、零件属性设置、运动副设置、传感器与执行器设置,其中相关参数包括运动关节的角度、速度、加速度、力矩、重力加速度以及材料参数与阻尼参数等物理特性。
12、所述的一种基于mcd的码垛机器人数字孪生方法,所述构建所述虚实映射机制的过程包括以下步骤:
13、将虚拟装配线模型中的参数变量与载入的plc中的参数变量一一对应,完成信号的映射。
14、所述的一种基于mcd的码垛机器人数字孪生方法,所述方法的模块包括:
15、架构建立模块,用于建立机器人数字孪生系统的总体架构,包括物理对象、虚拟孪生体连接、数据和服务系统;
16、孪生体构建模块,用于基于nx mcd构建虚拟机器人模型,并在mcd模块完成运动参数的配置;
17、信号适配器构建模块,用于构建虚拟端输入信号与输出信号的信号适配器;
18、虚实映射模块,用于构建机器人数字孪生系统的虚实映射机制,通过所述虚实映射机制将物理信息映射到虚拟机器人模型内,并在机电一体化模块内建立虚拟机器人与外部的信号配置以及信号间的映射;
19、同步模块,用于对机器人数字孪生系统的plc实时状态信号进行比对,保证实际装配与虚拟装配的同步运行;
20、交互模块,用于在装配线数字孪生系统中的可视化界面对装配线的运行方式进行监督与管理,及时与物理实体沟通,实现对实际机器人的管控。
21、所述的一种基于mcd的码垛机器人数字孪生方法,所述运动参数的配置包括相关参数设置、零件属性设置、运动副设置、传感器与执行器设置,其中相关参数包括运动关节的角度、速度、加速度、力矩、重力加速度以及材料参数与阻尼参数等物理特性。
22、本发明的技术效果及优点:
23、1.本发明基于数字孪生将现实机器人与虚拟孪生体进行通信连接,以实现现实机器人和虚拟孪生体的联动;对现实机器人和虚拟孪生体进行仿真模拟,以获得仿真结果;根据仿真结果布局实际机器人。通过搭建现实机器人和虚拟孪生体能够对实际生产制造进行高度还原,反映真实的物理特性;通过数字孪生技术进行仿真模拟,能够提前检测出布局方案的不足之处并进行优化,加强对实际机器人的控制,实现了实际物理体与虚拟孪生体的虚实同步,实现了生产制造信息的及时反馈,提高了加工制造效率。
24、 2.本发明能够实现机器人数字孪生体的开发,解决了数字孪生中虚实映射等难题,既实现物理空间与虚拟空间的同步。本发明调试技术提高了设计速度,缩短调试时间,降低生产成本,保证生产安全。
25、3.本发明通过监控显示单元、数据交互单元实现对码垛机器人的监控,在采集机器人的数据中,通过评估码垛机器人的健康状态,实现对码垛机器人的管理,并且能够得到准确的码垛机器人工作效率。
技术特征:1.一种基于mcd的码垛机器人数字孪生方法,其特征在于,所述方法构建机器人物理体的数字孪生体,数字孪生体对物理体提取数据并根据实时状况进行监控,具体包括以下步骤:
2.根据权利要求1所述的一种基于mcd的码垛机器人数字孪生方法,其特征在于,所述运动参数的配置包括相关参数设置、零件属性设置、运动副设置、传感器与执行器设置,其中相关参数包括运动关节的角度、速度、加速度、力矩、重力加速度以及材料参数与阻尼参数等物理特性。
3.根据权利要求1所述的一种基于mcd的码垛机器人数字孪生方法,其特征在于,所述构建所述虚实映射机制的过程包括以下步骤:
4.根据权利要求1所述的一种基于mcd的码垛机器人数字孪生方法,其特征在于,所述方法的模块包括:
5.根据权利要求4所述的一种基于mcd的码垛机器人数字孪生方法,其特征在于,所述运动参数的配置包括相关参数设置、零件属性设置、运动副设置、传感器与执行器设置,其中相关参数包括运动关节的角度、速度、加速度、力矩、重力加速度以及材料参数与阻尼参数等物理特性。
技术总结本发明公开了一种基于MCD的码垛机器人数字孪生方法,涉及一种机器人数字孪生方法,该方法包括建立码垛机器人数字孪生系统的五维结构模型;NX MCD软件构建生产线数字孪生体,完成孪生体物理特性及运动参数的配置;构建系统虚实信号的映射,通过机电概念设计模块中的外部信号配置,将采集物理对象的信号映射到虚拟模型中,从而实现物理对象与孪生体的交互;结合采集数据进行分析,应对故障和危险发生,以此减少操作错误和事故风险,并提高工作效率和安全性。本发明调试技术提高了设计速度,缩短调试时间,降低生产成本,保证生产安全。技术研发人员:陈斌,汤峰,郑国旺,王国伟,韩旭彤,王琳泉受保护的技术使用者:沈阳化工大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49807.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表