一种孔位测量误差补偿方法、装置、存储介质及电子设备与流程
- 国知局
- 2024-07-08 10:44:00
本技术涉及机床测量,具体涉及一种孔位测量误差补偿方法、装置、存储介质及电子设备。
背景技术:
1、高强度碳纤维复材蒙皮是构成飞机气动外形的关键零件,在复材蒙皮上制有大量的锪窝孔,铆钉或螺栓通过锪窝孔将复材蒙皮与内部金属零件连接起来。锪窝孔的加工分为两步,第一步为加工蒙皮底孔,第二步是在蒙皮底孔的基础上加工锪窝孔。由于复材蒙皮的弱刚性、蒙皮与工装之间的间隙、加工变形等不利因素影响,第一步加工的蒙皮底孔会出现孔位偏差,因此必须准确测量蒙皮底孔的孔位并据此编写数控锪窝程序,才能保证第二步的锪窝孔精度。
2、近年来机器视觉技术取得快速发展,通过快速采集被测对象的图像并结合强大的图像算法,机器视觉能够达到高精度、高效率的检测效果,因此越来越多地应用于在航空制造领域。对于蒙皮底孔的测量,机器视觉同样能够提供完备的解决方案,只需将机器视觉装置安装在机床主轴上,然后拍摄蒙皮底孔照片,最后借助图像算法即可求解蒙皮底孔的孔位。
3、机器视觉装置同样也存在测量误差,其中有两项主要的系统误差:(1)装夹误差带来的机器视觉装置相对于机床主轴的位姿(位置与姿态)偏离;(2)机床旋转误差带来的实际拍照位姿与理论拍照位姿之间的偏差。它们均会造成在采集的蒙皮底孔图像中,底孔不能占据正确的区域,引起孔位坐标的计算误差,因此必须采取有效的补偿手段,以达到正确计算蒙皮底孔孔位的目的。
4、如专利cn202110761183.9公开了一种用于非接触式测量孔的在线检测装置及其使用方法,但是该方法中只对机床初始状态的拍照位姿进行补偿,没有考虑机床摆角状态下的位姿误差。专利cn202210230294.1公开了一种用于孔在线检测与孔精加工的装置及其加工方法,该方法采用反复迭代的方式计算机器视觉装置的安装位姿,过程相对繁琐且耗时较长,而且也没有考虑机床旋转误差;专利cn202210053088.8公开了一种非接触式照相测孔标定装置及方法,实际上也是为了得到机器视觉装置的准确拍照位姿,但是该装置结构较为复杂且需要在标定过程中与机床主轴同步运动,对机械运动精度和运动控制系统性能要求高,而且同样是采用反复迭代的方式计算误差补偿值,过程相对繁琐且耗时较长。
技术实现思路
1、本技术的主要目的在于提供一种孔位测量误差补偿方法、装置、存储介质及电子设备,旨在解决现有技术中对孔位测量误差进行补偿的精度偏低的问题。
2、为实现上述目的,本技术的实施例采用的技术方案如下:
3、第一方面,本技术实施例提供一种孔位测量误差补偿方法,包括以下步骤:
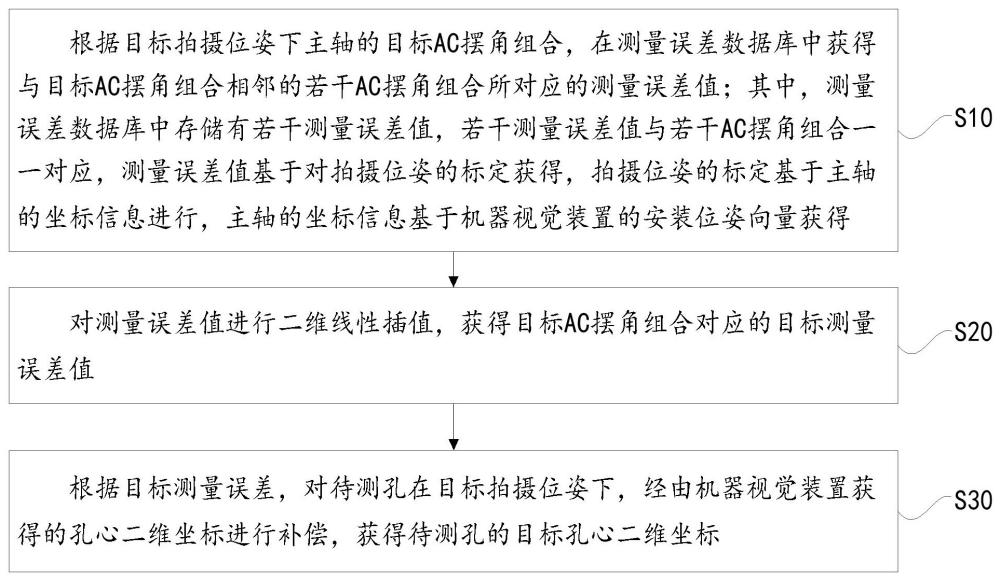
4、根据目标拍摄位姿下主轴的目标ac摆角组合,在测量误差数据库中获得与目标ac摆角组合相邻的若干ac摆角组合所对应的测量误差值;其中,测量误差数据库中存储有若干测量误差值,若干测量误差值与若干ac摆角组合一一对应,测量误差值基于对拍摄位姿的标定获得,拍摄位姿的标定基于主轴的坐标信息进行,主轴的坐标信息基于机器视觉装置的安装位姿向量获得;
5、对测量误差值进行二维线性插值,获得目标ac摆角组合对应的目标测量误差值;
6、根据目标测量误差,对待测孔在目标拍摄位姿下,经由机器视觉装置获得的孔心二维坐标进行补偿,获得待测孔的目标孔心二维坐标。
7、在第一方面的一种可能实现方式中,根据目标拍摄位姿下主轴的目标ac摆角组合,在测量误差数据库中获得与目标ac摆角组合相邻的若干ac摆角组合所对应的测量误差值之前,孔位测量误差补偿方法还包括:
8、根据辅助坐标系之间的变换关系,获得机器视觉装置的安装位姿向量表达式;
9、建立安装位姿向量表达式的求解方程,并根据经由机器视觉装置获得的标准球的球心二维坐标,求解求解方程,获得机器视觉装置的安装位姿向量。
10、在第一方面的一种可能实现方式中,建立安装位姿向量表达式的求解方程,并根据经由机器视觉装置获得的标准球的球心二维坐标,求解求解方程,获得机器视觉装置的安装位姿向量之前,孔位测量误差补偿方法还包括:
11、在机器视觉装置的有效范围内,按照正交方式获得若干标定点位;
12、在标定点位保持ac摆角与主轴的定位角度均为零,对标准球进行图像采集,获得标准球的球心二维坐标。
13、在第一方面的一种可能实现方式中,根据辅助坐标系之间的变换关系,获得机器视觉装置的安装位姿向量表达式之前,孔位测量误差补偿方法还包括:
14、根据机器视觉装置的物方平面以及机床的绝对坐标系,建立辅助坐标系。
15、在第一方面的一种可能实现方式中,根据目标拍摄位姿下主轴的目标ac摆角组合,在测量误差数据库中获得与目标ac摆角组合相邻的若干ac摆角组合所对应的测量误差值之前,孔位测量误差补偿方法还包括:
16、在测量所需的摆角范围内,将a摆角和c摆角进行划分组合,获得若干ac摆角组合;
17、根据摆角组合和主轴的坐标信息进行拍摄位姿的标定,获得若干测量误差值。
18、在第一方面的一种可能实现方式中,根据摆角组合和主轴的坐标信息进行拍摄位姿的标定,获得若干测量误差值之后,孔位测量误差补偿方法还包括:
19、根据测量误差值与ac摆角组合的一一对应关系,建立测量误差数据库。
20、在第一方面的一种可能实现方式中,根据目标拍摄位姿下主轴的目标ac摆角组合,在测量误差数据库中获得与目标ac摆角组合相邻的若干ac摆角组合所对应的测量误差值之前,孔位测量误差补偿方法还包括:
21、根据拍摄位姿下主轴的ac摆角组合和机器视觉装置相对主轴的安装位姿向量,获得主轴的坐标信息。
22、第二方面,本技术实施例提供一种孔位测量误差补偿装置,包括:
23、获得模块,获得模块用于根据目标拍摄位姿下主轴的目标ac摆角组合,在测量误差数据库中获得与目标ac摆角组合相邻的若干ac摆角组合所对应的测量误差值;其中,测量误差数据库中存储有若干测量误差值,若干测量误差值与若干ac摆角组合一一对应,测量误差值基于对拍摄位姿的标定获得,拍摄位姿的标定基于主轴的坐标信息进行,主轴的坐标信息基于机器视觉装置的安装位姿向量获得;
24、插值模块,插值模块用于对测量误差值进行二维线性插值,获得目标ac摆角组合对应的目标测量误差值;
25、补偿模块,补偿模块用于根据目标测量误差,对待测孔在目标拍摄位姿下,经由机器视觉装置获得的孔心二维坐标进行补偿,获得待测孔的目标孔心二维坐标。
26、第三方面,本技术实施例提供一种计算机可读存储介质,储存有计算机程序,计算机程序被处理器加载执行时,实现如上述第一方面中任一项提供的孔位测量误差补偿方法。
27、第四方面,本技术实施例提供一种电子设备,包括处理器及存储器,其中,
28、存储器用于存储计算机程序;
29、处理器用于加载执行计算机程序,以使电子设备执行如上述第一方面中任一项提供的孔位测量误差补偿方法。
30、与现有技术相比,本技术的有益效果是:
31、本技术实施例提出的一种孔位测量误差补偿方法、装置、存储介质及电子设备,该方法包括:根据目标拍摄位姿下主轴的目标ac摆角组合,在测量误差数据库中获得与目标ac摆角组合相邻的若干ac摆角组合所对应的测量误差值;其中,测量误差数据库中存储有若干测量误差值,若干测量误差值与若干ac摆角组合一一对应,测量误差值基于对拍摄位姿的标定获得,拍摄位姿的标定基于主轴的坐标信息进行,主轴的坐标信息基于机器视觉装置的安装位姿向量获得;对测量误差值进行二维线性插值,获得目标ac摆角组合对应的目标测量误差值;根据目标测量误差,对待测孔在目标拍摄位姿下,经由机器视觉装置获得的孔心二维坐标进行补偿,获得待测孔的目标孔心二维坐标。本技术通过目标拍摄位姿下的ac摆角组合,直接在测量误差数据库中调取测量误差值,由于测量的摆角不一定能够与数据库中已有的数据对应,因此通过获取相邻的摆角组合所对应的测量误差值,然后利用线性插值的方式得到目标ac摆角组合对应的目标测量误差值,最后利用该值对机器视觉装置检测的孔位进行补偿,以此实现孔位测量误差的补偿;由于测量误差数据库中测量误差值是基于拍摄位姿标定获得,而该标定由主轴的坐标信息指导进行,并且由于主轴的坐标信息将机器视觉装置的安装位姿向量关联,同时考虑了安装位姿与拍摄位姿的误差,以此实现更高精度的误差补偿。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49980.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表