基于可穿戴电阻传感器的手套制备方法及控制系统
- 国知局
- 2024-07-08 10:43:59
本发明涉及柔性传感器制备及应用领域,尤其涉及一种基于可穿戴电阻传感器的手套制备方法及控制系统。
背景技术:
1、机械手能够根据人手的动作进行仿真动作,从而实现伸展或者握紧等目标动作,进而完成抓取、转动、移动等动作指示,现有技术中通常会在橡胶手套上设置传感器,以通过传感器生成动作指示,而携带笨重、不够柔性、动作指示不够稳定以及响应速度不够及时等因素严重影响了现有工况下对于机械手全模仿的用户需求。
2、例如,cn115709466a公开了一种基于柔性应变传感器的交互式机械手,其柔性传感器由弹性材料与导电材料充分混合而成,使用热塑性弹性体-氢化苯乙烯-丁二烯-苯乙烯嵌段共聚物(sebs)作为柔性基底,将石墨烯作为导电材料,在室温下将sebs和石墨烯以1:2的比例溶于40ml甲苯中,磁力搅拌机充分搅拌12h,然后将溶液倒出室温下风干,等待24h后成膜,用激光切割机切割为条状,布置在相应指间关节、掌指关节和腕关节的位置。然而由于石墨烯的线性区域非常窄,使用sebs和石墨烯相结合的弹性材料对于提升应变电阻的线性度、稳定度以及灵敏度而言并不理想。
3、目前并没有一种能够集轻便、柔性、稳定以及灵敏为一体的手套制备方法及控制系统。
技术实现思路
1、本发明提供了一种基于可穿戴电阻传感器的手套制备方法及控制系统,利用弹性高分子(ecoflex)基体、碳纳米管/弹性高分子(cnt-ecoflex)混合层、弹性高分子(ecoflex)封装层的三层结构构建的可穿戴电阻传感器,实现良好的线性以及回复性能。
2、第一方面,本发明提供了一种基于可穿戴电阻传感器的手套制备方法,包括:
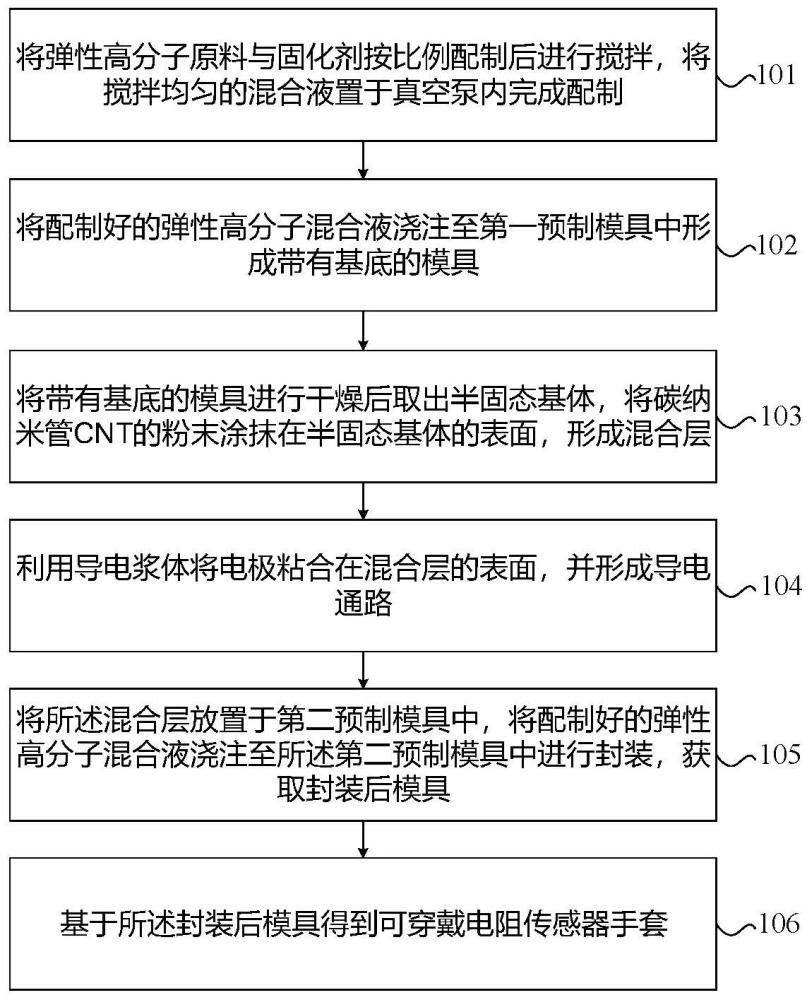
3、将弹性高分子原料与固化剂按比例配制后进行搅拌,将搅拌均匀的混合液置于真空泵内完成配制;
4、将配制好的弹性高分子混合液浇注至第一预制模具中形成带有基底的模具;
5、将带有基底的模具进行干燥后取出半固态基体,将碳纳米管cnt的粉末涂抹在半固态基体的表面,形成混合层;
6、利用导电浆体将电极粘合在混合层的表面,并形成导电通路;
7、将所述混合层放置于第二预制模具中,将配制好的弹性高分子混合液浇注至所述第二预制模具中进行封装,获取封装后模具;
8、基于所述封装后模具得到可穿戴电阻传感器手套。
9、根据本发明提供的所述的基于可穿戴电阻传感器的手套制备方法,在将弹性高分子原料与固化剂按比例配制后进行搅拌,将搅拌均匀的混合液置于真空泵内完成配制的过程中;
10、所述弹性高分子原料与固化剂按1:1的比例配制;
11、搅拌的时长为1分钟~2分钟;
12、在确定无气泡的情况下完成配制;
13、所述弹性高分子原料为柔性铂金硅胶。
14、根据本发明提供的所述的基于可穿戴电阻传感器的手套制备方法,所述第一预制模具的高度为0.9mm~1.1mm;
15、所述混合层是将碳纳米管cnt的粉末反复涂抹在半固态基体的表面上4次~5次后形成的,所述混合层的厚度为0.8mm~1mm;
16、所述第二预制模具的高度为2.6mm~3.2mm。
17、根据本发明提供的所述的基于可穿戴电阻传感器的手套制备方法,所述利用导电浆体将电极粘合在混合层的表面,并形成导电通路,包括:
18、利用导电银浆将铜导线制作成的电极粘合在混合层的表面,并将伸出所述混合层的铜导线弯曲成三维螺旋状,形成导电通路;
19、其中,螺旋间距为1.2mm~1.5mm。
20、根据本发明提供的所述的基于可穿戴电阻传感器的手套制备方法,所述基于所述封装后模具得到可穿戴电阻传感器手套,包括:
21、将所述封装后模具置于80℃的干燥环境下干燥2小时后取出并脱模,得到可穿戴电阻传感器;
22、根据不同手指对应的橡胶部分长度的不同,确定每一手指对应的可穿戴电阻传感器的长度;
23、分别制备不同手指对应的可穿戴电阻传感器,将不同手指对应的可穿戴电阻传感器粘合在橡胶手套对应的橡胶部分,得到可穿戴电阻传感器手套。
24、第二方面,提供了一种基于可穿戴电阻传感器的控制系统,包括利用所述手套制备方法制备得到的可穿戴电阻传感器、数据处理-无线传输模块以及无线数据接收-动作控制模块;
25、其中,所述可穿戴电阻传感器连接所述数据处理-无线传输模块,所述数据处理-无线传输模块连接所述无线数据接收-动作控制模块;
26、所述可穿戴电阻传感器用于根据可穿戴电阻传感器手套的动作,获取传感器电阻变化的模拟信号;
27、所述数据处理-无线传输模块用于接收来自所述可穿戴电阻传感器的模拟信号,将所述模拟信号转换为数字信号,生成控制指令,并将所述控制指令发送至所述无线数据接收-动作控制模块;
28、所述无线数据接收-动作控制模块用于接收来自所述数据处理-无线传输模块的控制指令,根据所述控制指令实现机械手的动作控制。
29、根据本发明提供的基于可穿戴电阻传感器的控制系统,所述数据处理-无线传输模块包括数据处理单元与无线通信单元,所述数据处理单元连接所述无线通信单元;
30、所述数据处理单元用于接收来自所述可穿戴电阻传感器的模拟信号,转化所述模拟信号为电压信号,利用预设滤波算法进行校准以及拟合,得到数字信号,根据所述数字信号,从预设信号与预设指令的对应关系中,确定出控制指令;
31、所述无线通信单元用于将所述控制指令发送至所述无线数据接收-动作控制模块。
32、根据本发明提供的基于可穿戴电阻传感器的控制系统,在根据所述数字信号,从预设信号与预设指令的对应关系中,确定出控制指令之前,还包括:
33、对于任一手指,获取所述手指在握紧状态下对应的第一信号值,标定握紧指令与所述第一信号值;
34、获取所述手指在伸展状态下对应的第二信号值,标定伸展指令与所述第二信号值;
35、根据所述握紧指令、所述第一信号值、所述伸展指令以及所述第二信号值,构建预设信号与预设指令的对应关系;
36、其中,所述根据所述握紧指令、所述第一信号值、所述伸展指令以及所述第二信号值,构建预设信号与预设指令的对应关系,包括:
37、根据所述握紧指令以及所述伸展指令,确定在不同手指动作幅度下对应每一状态指令;
38、以所述第一信号值以及所述第二信号值为取值范围,构建每一信号值与每一手指动作幅度的映射关系,以构建预设信号与预设指令的对应关系。
39、根据本发明提供的基于可穿戴电阻传感器的控制系统,所述无线数据接收-动作控制模块包括无线数据接收单元以及动作控制单元,所述无线数据接收单元连接所述动作控制单元;
40、所述无线数据接收单元用于接收来自所述数据处理-无线传输模块的控制指令,并将所述控制指令发送至所述动作控制单元;
41、所述动作控制单元用于向机械手发出所述控制指令,实现机械手的仿生动作,以模拟可穿戴电阻传感器手套的动作。
42、根据本发明提供的基于可穿戴电阻传感器的控制系统,所述数据处理-无线传输模块设置于可穿戴电阻传感器手套的手腕位置,所述可穿戴电阻传感器伸出混合层的铜导线与所述数据处理-无线传输模块电性连接;
43、所述传感器电阻随应变率变化而呈线性变化,所述应变率为手指弯曲程度;
44、任一手指拉伸过程所对应的电阻变化与任一手指回复过程所对应的电阻变化趋于一致;
45、所述应变率的取值范围为0%~200%。
46、本发明提供了一种基于可穿戴电阻传感器的手套制备方法及控制系统,围绕一维纳米材料和高分子形成的复合结构展开设计,利用柔性铂金硅胶基体随时间延长的固化程度变化规律,即在半固态弹性高分子ecoflex的基体表面均匀涂抹cnt,使cnt渗入ecoflex形成cnt-ecoflex复合材料,并在大量对照试验的基础上,面向成型过程中温度对cnt-ecoflex复合材料性能的影响进行客观准确的分析,设计出针对高精度柔性可穿戴电阻传感器的制备工艺,滞回曲线测试结果表明,该工艺有效的提升了可穿戴电阻传感器的灵敏度和在弯曲变形条件下渗流导电网络的稳定性;基于该传感器及其手套制备工艺,本发明设计了一种基于可穿戴电阻传感器的机械手无线动作控制系统,包括可穿戴电阻传感器模块、数据处理-无线传输模块以及无线数据接收-动作控制模块,该系统具有轻便可穿戴、稳定、响应速度快以及循环性能稳定等特点,能够实时、线性和单调的捕捉手指动作,并能够将传感器电阻变化数字化,通过无线的方式远程发送至机械手控制器,实现对机械手的全模仿无延时的控制操作。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49979.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表