一种可调节的芯片翻转机械手及使用方法与流程
- 国知局
- 2024-07-08 10:48:26
本发明涉及芯片夹持机械手,具体为一种可调节的芯片翻转机械手及使用方法。
背景技术:
1、随着半导体工艺的发展,越来越多的可以实现不同功能的芯片被用于诸如手机和电脑等电子成品,并且随着自动化生产的普及,芯片在电路板上进行安装时通常是采用机械手进行转移处理。
2、参考申请号cn202310382222.3,名称为一种芯片翻转机械手的申请,该申请通过在安装板上设置多个夹持杆组件,使得本机械手可以对于不同尺寸的芯片进行夹持处理,并且由于支撑管可以自由的转动,从而使得机械手可以带动芯片进行翻转,但市面上常见的机械手同上述申请中,常用的机械手是采用电控或者是气控的,但电控以及气控较难对夹持的力度进行掌控,这容易造成机械手夹损芯片的情况发现,此外市面上常见的机械手通常为两爪或三爪结构,两爪或三爪夹持芯片时,容易出现夹持不稳定、夹持过程中芯片偏斜等问题,严重影响芯片夹持的稳定性。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种可调节的芯片翻转机械手及使用方法。
技术实现思路
1、本发明的目的在于提供一种可调节的芯片翻转机械手及使用方法,以解决上述背景技术中提出的问题。
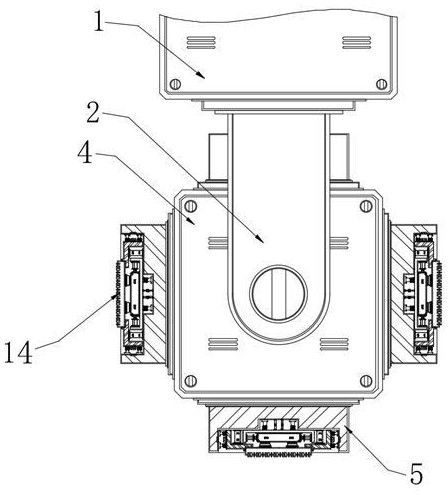
2、为实现上述目的,本发明提供如下技术方案:一种可调节的芯片翻转机械手,包括移动臂、限位组件和吸附组件,所述移动臂的底部连接有衔接座,且衔接座的外端设置有第一电机,所述衔接座的内侧设置有翻转座,所述翻转座的外端安置有抓取座,且抓取座的内侧四周安置有第一电磁铁,所述第一电磁铁的外端设置有限位组件,所述抓取座的内部安置有第二电磁铁,且抓取座的内部安置有第二弹簧,且第二弹簧的底部外侧设置有衔接框,所述衔接框与抓取座之间设置有拉力感应器,且衔接框的内部两侧设置有第一电推杆,所述第一电推杆的外端连接有吸附组件,且吸附组件的底部设置有芯片,所述抓取座的底部四周设置有定位摄像头。
3、进一步的,所述第一电机带动翻转座在衔接座内侧旋转,且抓取座在翻转座四个面上均有安置。
4、进一步的,所述限位组件包括第一弹簧、卡座、衔铁、第二电机、丝杠和限位块,所述第一弹簧的外端连接有卡座,且卡座靠近第一电磁铁一侧连接有衔铁,所述抓取座内部设置有第二电机,且第二电机的输出端连接有丝杠,所述丝杠的外端设置有限位块。
5、进一步的,所述第一弹簧与卡座弹性连接,且卡座与衔铁为一体化。
6、进一步的,所述衔铁与第一电磁铁电磁吸附连接,所述卡座与第二电磁铁电磁吸附连接。
7、进一步的,所述卡座与芯片卡合固定,且限位块对卡座的位移进行限位。
8、进一步的,所述第二弹簧与衔接框弹性连接,且第一电推杆沿衔接框的竖直中心线对称分布。
9、进一步的,所述吸附组件包括真空泵、固定框、滑槽、抽吸软管、位移座、第二电推杆和吸盘,所述真空泵的底部外侧设置有固定框,且固定框的底部内侧开设有滑槽,所述真空泵的底部外侧连接有抽吸软管,且抽吸软管末端设置有位移座,所述位移座的外部两侧设置有第二电推杆,且位移座的底部外侧设置有吸盘。
10、进一步的,所述真空泵通过抽吸软管、位移座与吸盘相连通,且吸盘与芯片吸附连接,所述第二电推杆带动位移座在滑槽内部位移,且位移座与吸盘固定连接。
11、进一步的,一种可调节的芯片翻转机械手的使用方法,包括以下步骤:
12、s1:移动臂带动设备移动至需要夹持的芯片外端,使抓取座覆盖住所需夹持的芯片,第一电磁铁失电,衔铁失去与第一电磁铁的电磁吸附后,会因第一弹簧的弹性复位进行回弹,而衔铁回弹的过程中,带动卡座向芯片的方向进行位移,从而实现对芯片的卡合固定,通过第二电磁铁工作,对卡座进行吸附固定,这使得卡座稳定的对芯片进行夹持,而在卡座对芯片夹持的过程中,吸盘还对芯片进行吸附提升芯片固定稳定性;
13、s2:第二电机工作,通过丝杠带动限位块进行位移,限位块对卡座的位移进行限位,这使得设备在使用过程中,通过控制限位块的位置,在抓取座对芯片进行覆盖时,无论此时芯片是否摆正,在卡座回弹的过程中与限位块贴合后,都对芯片进行摆正,这使得设备在对芯片夹持过程中具有较大的容错空间;
14、s3:通过限位块的位置调节性,这使得设备在使用过程中对各种类型的芯片进行稳定夹持,此外翻转座上四个面上均安置有抓取座,通过第一电机带动翻转座在衔接座内侧翻转,使设备一次性对多块不同类型的芯片进行抓取;
15、s4:通过移动臂工作,带动芯片移动至需要点焊的pcb板上,此时第二电磁铁失电,同时第一电磁铁得电,解除卡座对芯片的夹持,此时芯片在pcb板上贴合完成,芯片在pcb板上贴合完成后,定位摄像头通过对pcb板进行拍摄来判断当前芯片定位是否发生偏斜,若芯片与点焊位点存在偏差时,定位摄像头将偏斜位距的数据进行上传,数据上传完成后,通过第一电推杆工作,带动吸附组件进行横向位移,这使得吸附组件通过横向位移带动芯片调整横向位置的误差,而通过第二电推杆工作,带动位移座在滑槽内侧进行位移,这使得吸盘带动芯片进行纵向位置的误差调整;
16、s5:移动臂再次移动至芯片外端,真空泵工作,使吸盘再次对芯片进行吸附,吸盘对芯片吸附完成后,移动臂进行上移操作,若此时芯片焊接牢固,移动臂上移过程中,衔接框会因吸盘与芯片的吸附保持在原位并拉伸第二弹簧,第二弹簧拉伸后,拉力感应器同时会被拉长,此时拉力感应器会感应到拉力,拉力感应器感应到拉力表明芯片在受到额定拉力时不会与pcb板发生松脱,则说明芯片的焊接质量合格,反之则表面芯片的焊接质量不达标。
17、本发明提供了一种可调节的芯片翻转机械手及使用方法,具备以下有益效果:
18、1、本发明第一电磁铁失电,衔铁失去与第一电磁铁的电磁吸附后,会因第一弹簧的弹性复位进行回弹,而衔铁回弹的过程中,能带动卡座向芯片的方向进行位移,从而实现对芯片的卡合固定,而卡座对芯片卡合固定后,通过第二电磁铁工作,可对卡座进行吸附固定,这使得卡座能稳定的对芯片进行夹持,通过该操作,能实现设备快速、稳定的对芯片夹持,此外因卡座对芯片的夹持是利用第一弹簧的回弹力实现的,这能避免传统电控或气控夹爪夹持芯片时难以把控力度,导致芯片损坏的情况出现,此外在卡座对芯片夹持的过程中,吸盘还可对芯片进行吸附,通过吸附配合夹持,能使芯片的固定稳定性进一步提升。
19、2、本发明通过第二电机工作,能通过丝杠带动限位块进行位移,限位块可对卡座的位移进行限位,这使得设备在使用过程中,通过控制限位块的位置,在抓取座对芯片进行覆盖时,无论此时芯片是否摆正,在卡座回弹的过程中与限位块贴合后,都可对芯片进行摆正,这使得设备在对芯片夹持过程中具有较大的容错空间,这能提升设备对芯片的夹持稳定性和芯片的夹持精度,此外通过限位块的位置可调节性,这使得设备在使用过程中可对各种类型的芯片进行稳定夹持,此外翻转座上四个面上均安置有抓取座,通过以上设计,设备在使用过程中,通过第一电机带动翻转座在衔接座内侧翻转,能使设备一次性对多块不同类型的芯片进行抓取,这能提升设备的工作效率,同时能提升设备的适用范围。
20、3、本发明移动臂工作,能带动芯片移动至需要点焊的pcb板上,此时第二电磁铁失电,同时第一电磁铁得电,能解除卡座对芯片的夹持,此时芯片在pcb板上贴合完成,芯片在pcb板上贴合完成后,定位摄像头可通过对pcb板进行拍摄来判断当前芯片定位是否发生偏斜,若芯片与点焊位点存在偏差时,定位摄像头可将偏斜位距的数据进行上传,数据上传完成后,通过第一电推杆工作,能带动吸附组件进行横向位移,这使得吸附组件能通过横向位移带动芯片调整横向位置的误差,而通过第二电推杆工作,能带动位移座在滑槽内侧进行位移,这使得吸盘能带动芯片进行纵向位置的误差调整,因移动臂体型较大在精密调位时的效果较差,通过定位摄像头配合第一电推杆和第二电推杆对芯片进行精密位置调整,能有效降低芯片因位置偏斜影响点焊效果。
21、4、本发明芯片焊接完成后,移动臂能再次移动至芯片外端,真空泵工作,能使吸盘再次对芯片进行吸附,吸盘对芯片吸附完成后,移动臂进行上移操作,若此时芯片焊接牢固,移动臂上移过程中,衔接框会因吸盘与芯片的吸附保持在原位并拉伸第二弹簧,第二弹簧拉伸后,拉力感应器同时会被拉长,此时拉力感应器会感应到拉力,拉力感应器感应到拉力表明芯片在受到额定拉力时不会与pcb板发生松脱,则说明芯片的焊接质量合格,反之则表面芯片的焊接质量不达标,通过该设备,设备能在芯片点焊完成后对其焊接质量进行检测,这能提升设备的整体功能性。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50302.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表