一种石球搬运机器人
- 国知局
- 2024-07-08 10:50:25
本申请涉及自动化搬运设备领域,特别涉及一种石球搬运装置。
背景技术:
1、随着人工智能技术、自动化技术和信息技术的飞速发展,搬运设备的智能化程度也在不断提高,搬运机器人是实现自动化搬运作业的主要设备。
2、在城市建设中经常用到路障石球,其目的是阻挡车辆驶入禁行区域,减少行人安全受到车辆的威胁,规范道路交通。部分道路上路障石球随意摆放,无人管辖,石球搬运机器人能大大减轻人们的劳动强度,提升路障石球管理效率。
技术实现思路
1、本公开提供一种石球搬运机器人,能够降低人们搬运路障石球的劳动强度,有利于提升路障石球的管理水平。
2、为了实现上述目的,本公开实施例提供如下技术方案:
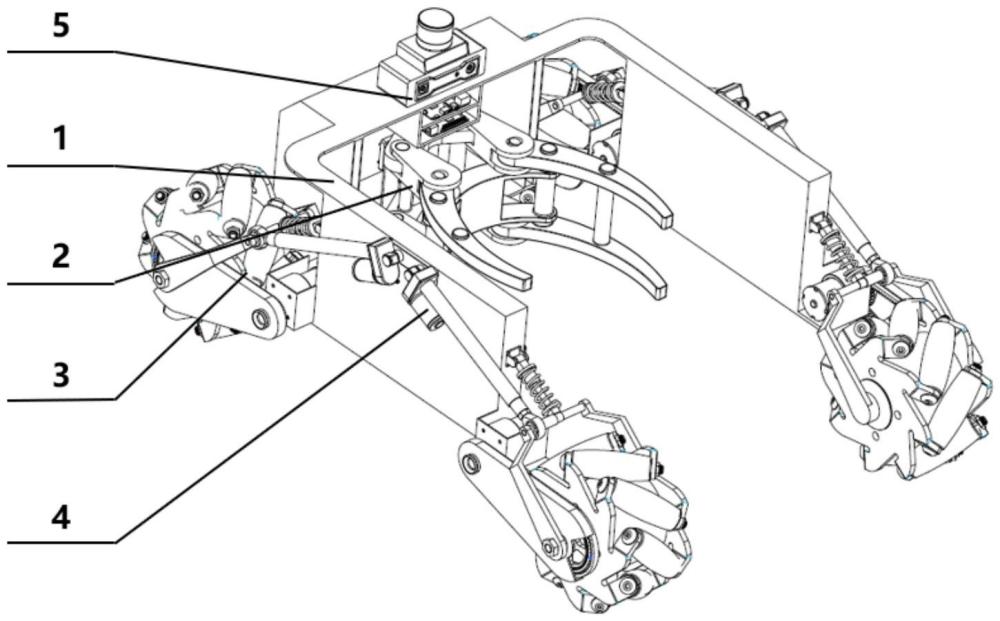
3、本实用新型公开了一种石球搬运机器人,该石球搬运机器人中,包括u型机架;机械爪组件,所述机械爪组件的底端固定在u型机架内部;麦轮驱动组件,所述麦轮驱动组件固定在u型机架四侧;可伸缩悬架,所述可伸缩悬架固定在麦轮驱动组件上;控制组件,所述控制组件包括装载ubuntu18.04以及ros melodic操作系统的树莓派、stm32驱动器、激光雷达和摄像头。
4、如上所述的石球搬运机器人,优选的,所述可伸缩悬架包括连接板、电动推杆、弹簧支架、伸缩弹簧、转动销和连接杆。所述连接板设于u型机架上,所述电动推杆底端与所述连接板转动连接,所述转动销与所述电动推杆顶端转动连接,所述连接杆与所述转动销固定连接,所述弹簧支架设于所述u型机架上,所述伸缩弹簧一侧与所述弹簧支架转动连接,另一侧与所述转动销转动连接。所述连接杆一侧设于所述转动销上,另一侧设于麦克纳姆轮上。
5、优选的,所述机械爪包括丝杠推杆、固定支架、连接架、转动支架和末端夹爪,所述丝杠推杆固定端设于所述u型机架上,所述固定支架固定端设于所述u型机架上,所述连接架通过连接销与所述固定支架转动连接,所述末端夹爪通过连接销与上下两个连接架转动连接,所述转动支架通过长连接销与两个末端夹爪转动连接,所述丝杠推杆活动端设于所述转动支架上。
6、优选的,所述u型机架呈u型框架结构,所述机械爪夹取的石球位于机器人中心位置。
7、优选的,所述电动推杆与所述伸缩弹簧伸缩方向平行,所述转动销为阶梯轴结构,所述电动推杆和伸缩弹簧分别通过轴肩固定于转动销上,所述转动销两端设有螺纹,所述连接杆通过螺纹连接固定在转动销上。
8、优选的,所述转动支架一侧设有孔,所述丝杠推杆的活动端固定与孔内,所述末端夹爪呈圆弧形状,所述两个末端夹爪呈轴对称分布。
9、优选的,所述控制组件包括装载ubuntu18.04以及ros melodic操作系统的树莓派、stm32驱动器、激光雷达和摄像头。所述激光雷达设于所述u型机架顶部,所述摄像头设于所述激光雷达上方。
10、优选的,所述机械爪的转动范围为0°至180°;所述机械爪的转动起始位置为靠近所述u型机架两侧的位置,所述机械爪的转动终止位置为远离所述u型机架两侧的位置,或,所述机械爪的转动起始位置为远离所述u型机架两侧的位置,所述机械爪的转动终止位置为靠近所述u型机架两侧的位置。
11、本公开实施例提供的石球搬运机器人具有如下优点:
12、本实用新型公开了一种石球搬运机器人,该石球搬运机器人中,包括u型机架;机械爪组件,所述机械爪组件的底端固定在u型机架内部;麦轮驱动组件,所述麦轮驱动组件固定在u型机架四侧;可伸缩悬架,所述可伸缩悬架固定在麦轮驱动组件上;控制组件,所述控制组件包括装载ubuntu18.04以及ros melodic操作系统的树莓派、stm32驱动器、激光雷达和摄像头。可伸缩悬架可使u型机架相对于麦轮驱动组件升降移动,从而使安装在u型机架上的机械爪可以升降移动,以取放路障石球。
13、同时,通过设置麦轮驱动组件在u型机架上,可以使石球搬运机器人全向移动,以适应各种位置的路障石球;此外,u型机架呈u型结构,使安装在u型机架上的机械爪位于石球搬运机器人的中心位置,使机械爪所搬运的石球位于石球搬运机器人的重心上,保证了石球搬运机器人的稳定性;
14、除了上面所描述的本公开实施例解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本公开实施例提供的石球搬运机器人所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。
15、与现有技术相比,本申请的有益效果是:首先,石球搬运机器人使用了激光雷达、摄像头,融入了机器视觉、自动导航新技术,可以实现石球的定点自动布置与收集;其次,石球搬运机器人使用麦克纳姆轮,使机器人具有全方位转向的机动性能;夹取装置采用丝杠推杆,具有自锁性,使石球夹取稳定可靠;相较于工业重载搬运设备,石球搬运机器人更加灵活轻便,搬运成本低。石球搬运机器人底盘采用“u”形结构,石球搬运过程中重心稳定,减少无用负载的使用。
技术特征:1.一种石球搬运机器人,其特征在于,包括:
2.根据权利要求1所述的一种石球搬运机器人,其特征在于,所述可伸缩悬架(4)包括连接板(41)、电动推杆(42)、弹簧支架(43)、伸缩弹簧(44)、转动销(45)和连接杆(46);所述连接板设于u型机架(1)上,所述电动推杆(42)底端与所述连接板(41)转动连接,所述转动销(45)与所述电动推杆(42)顶端转动连接,所述连接杆(46)与所述转动销(45)固定连接,所述弹簧支架(43)设于所述u型机架(1)上,所述伸缩弹簧(44)一侧与所述弹簧支架(43)转动连接,另一侧与所述转动销(45)转动连接,所述连接杆(46)一侧设于所述转动销(45)上,另一侧设于麦克纳姆轮(34)上。
3.根据权利要求1所述的一种石球搬运机器人,其特征在于,所述机械爪(2)包括丝杠推杆(21)、固定支架(22)、连接架(23)、转动支架(24)和末端夹爪(25),所述丝杠推杆(21)固定端设于所述u型机架(1)上,所述固定支架(22)固定端设于所述u型机架(1)上,所述连接架(23)通过连接销与所述固定支架(22)转动连接,所述末端夹爪(25)通过连接销与上下两个连接架(23)转动连接,所述转动支架(24)通过长连接销与两个末端夹爪(25)转动连接,所述丝杠推杆(21)活动端设于所述转动支架(24)上。
4.根据权利要求1所述的一种石球搬运机器人,其特征在于,所述u型机架(1)呈u型框架结构,所述机械爪夹取的石球位于机器人中心位置。
5.根据权利要求2所述的一种石球搬运机器人,其特征在于,所述电动推杆(42)与所述伸缩弹簧(44)伸缩方向平行,所述转动销(45)为阶梯轴结构,所述电动推杆(42)和伸缩弹簧(44)分别通过轴肩固定于转动销(45)上,所述转动销(45)两端设有螺纹,所述连接杆(46)通过螺纹连接固定在转动销上。
6.根据权利要求3所述的一种石球搬运机器人,其特征在于,所述转动支架(24)一侧设有孔,所述丝杠推杆(21)的活动端固定与孔内,所述末端夹爪(25)呈圆弧形状,所述两个末端夹爪(25)呈轴对称分布。
7.根据权利要求1所述的一种石球搬运机器人,其特征在于,所述控制组件包括装载ubuntu18.04以及ros melodic操作系统的树莓派(53)、stm32驱动器(54)、激光雷达(51)和摄像头(52),所述激光雷达(51)设于所述u型机架(1)顶部,所述摄像头(52)设于所述激光雷达(51)上方。
8.根据权利要求3所述的一种石球搬运机器人,其特征在于,所述机械爪(2)的转动范围为0°至180°;所述机械爪(2)的转动起始位置为靠近所述u型机架(1)两侧的位置,所述机械爪(2)的转动终止位置为远离所述u型机架(1)两侧的位置,或,所述机械爪(2)的转动起始位置为远离所述u型机架(1)两侧的位置,所述机械爪(2)的转动终止位置为靠近所述u型机架(1)两侧的位置。
技术总结本技术公开了一种石球搬运机器人,该石球搬运机器人中,包括U型机架;机械爪组件,所述机械爪组件的底端固定在U型机架内部;麦轮驱动组件,所述麦轮驱动组件固定在U型机架四侧;可伸缩悬架,所述可伸缩悬架设于麦轮驱动组件上;控制组件,所述控制组件包括装载Ubuntu18.04以及ROS Melodic操作系统的树莓派、STM32驱动器、激光雷达和摄像头。本技术提供的石球搬运机器人,通过对路障石球进行识别,控制机械爪组件的开合、可伸缩悬架的升降和麦轮驱动组件的全向移动,可自主完成石球的搬运过程,解决了人工搬运路障石球劳动强度大的问题。技术研发人员:黄俊铭,刘志杰,曾艳地,姚懿宸,王子怡受保护的技术使用者:西北农林科技大学技术研发日:20230902技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50525.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表