面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置
- 国知局
- 2024-07-08 10:51:57
本发明涉及磁控抓取,尤其涉及一种面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置。
背景技术:
1、卫星系统强大与否非常重要,而太空非合作目标捕获技术是衡量卫星系统综合性能的重要指标。特别是,航空航天系统和军方投入巨量资金进行相关前沿尖端技术的自主开发和综合利用。
2、其中,空间机械臂对非合作目标卫星的捕获以及模块在轨组装起非常重要的作用,但是现有技术中的空间机械臂抓取能力有待提高。
3、因此,现有技术仍需进一步改进与发展。
技术实现思路
1、鉴于上述现有技术的不足,本发明的目的在于提供一种面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,提供了一种面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,以实现为空间机械臂提供抓取能力的目的。
2、本发明的技术方案如下:
3、一种面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,包括:
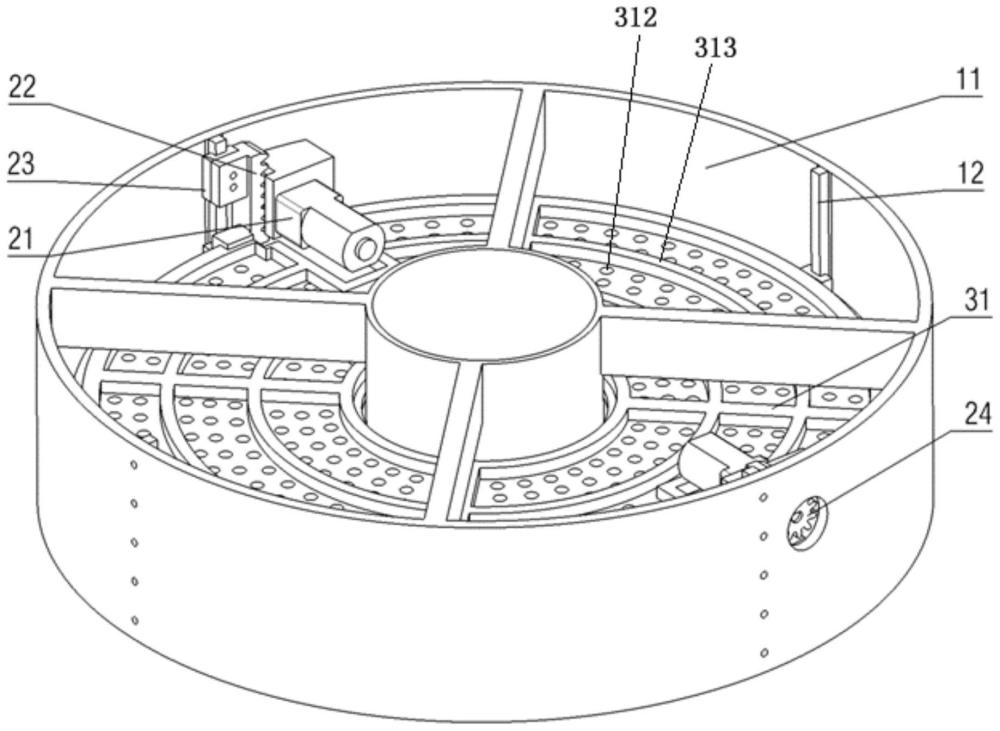
4、机架总成,所述机架总成包括圆盘外壳、和设置在所述圆盘外壳侧边上的多根直线矩形导轨;
5、驱动机构,所述驱动机构安装在所述机架总成上,用于设置驱动磁场发生机构的磁铁运动;
6、磁场发生机构,所述磁场发生机构根据驱动机构的驱动产生驱动柔性磁绒毛的磁场;
7、抓取执行面板,所述抓取执行面板根据所述磁场发生机构产生的磁场变化,以磁场驱动方式驱动所述抓取执行面板的柔性磁绒毛,执行抓取活动;
8、所述圆盘外壳设置为中间有筒腔的圆盘,所述直线矩形导轨均匀分布安装在所述圆盘外壳的内侧壁上。
9、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述驱动机构包括驱动器,所述驱动器包括直流电机控制器、及与所述直流电机控制器连接的直流减速电机,所述直流电机控制器控制电流的通断驱动所述直流减速电机运转;所述直流减速电机安装在所述圆盘外壳上。
10、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述直流电机控制器为可控制电机正转反转并有限位开关的宽电压控制板;
11、所述直流减速电机的厚度小于或等于10mm、轴径小于或等于5mm。
12、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述驱动机构还包括传动机构,所述传动机构,包括电机齿轮和磁铁底座齿条;其中,所述电机齿轮安装在直流减速电机的输出轴上,所述磁铁底座齿条安装在磁铁底座上,电机齿轮与磁铁底座齿条啮合,带动磁铁底座上下移动。
13、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述电机齿轮选用模数小于的齿轮;
14、所述磁铁底座齿条上设置有滑块底座,用于将齿条微型滑块安装在磁铁底座齿条上。
15、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述磁场发生机构包括磁铁底座、设置在所述磁铁底座上的磁铁组,以及在所述磁铁底座四周均匀分布的多个直线矩形导轨滑块。
16、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述磁铁底座为圆盘形磁铁底座,所述磁铁底座四周设置有均布的四个滑块底座,用于将所述直线矩形导轨滑块安装在磁铁底座上;所述磁铁底座设置有圆形孔洞,所述磁铁底座设置有加强筋。
17、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述磁铁底座通过直线矩形导轨滑块安装在所述机架总成的直线矩形导轨上;
18、所述磁铁组为a组磁铁,每组磁铁包括b块磁铁,其中,a>2,b>2。
19、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述磁铁组上表面产生的磁感线状态沿宽度方向疏密间隔分布,用于通过所述疏密间隔分布的磁感线状态的磁场变化控制柔性磁绒毛的摆动状态。
20、所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其中,所述抓取执行面板包括承载盘和柔性磁绒毛;所述承载盘安装在所述圆盘外壳的下端,所述柔性磁绒毛安装在承载盘上;
21、所述柔性磁绒毛为柔性环氧树脂与磁性材料制成的复合材料。
22、本发明的有益效果为:本发明公开了一种面向机械臂的齿轮齿条传动磁场纵向移动装置,涉及无感抓附技术领域。包括:机架总成;驱动机构,所述驱动机构包括控制器、直流电机、传动齿轮齿条;磁场发生装置,所述磁场发生装置包括磁铁底座、磁铁。装置采用直流减速电机提供动力,磁铁底座由四根直线矩形导轨支撑,通过齿轮齿条将电机的转动变为磁铁底座的上下移动,从而完成磁铁及磁场的纵向运动。受猫舌头丝状乳头的启发,由柔性环氧树脂与磁性材料制成的绒毛可以顺应磁感线方向摆动,从而完成抓取功能。
技术特征:1.一种面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,包括:
2.根据权利要求1所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述驱动机构包括驱动器,所述驱动器包括直流电机控制器、及与所述直流电机控制器连接的直流减速电机,所述直流电机控制器控制电流的通断驱动所述直流减速电机运转;所述直流减速电机安装在所述圆盘外壳上。
3.根据权利要求2所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述直流电机控制器为可控制电机正转反转并有限位开关的宽电压控制板;
4.根据权利要求1所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述驱动机构还包括传动机构,所述传动机构,包括电机齿轮和磁铁底座齿条;其中,所述电机齿轮安装在直流减速电机的输出轴上,所述磁铁底座齿条安装在磁铁底座上,电机齿轮与磁铁底座齿条啮合,带动磁铁底座上下移动。
5.根据权利要求4所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述电机齿轮选用模数小于的齿轮;
6.根据权利要求1所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述磁场发生机构包括磁铁底座、设置在所述磁铁底座上的磁铁组,以及在所述磁铁底座四周均匀分布的多个直线矩形导轨滑块。
7.根据权利要求6所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述磁铁底座为圆盘形磁铁底座,所述磁铁底座四周设置有均布的四个滑块底座,用于将所述直线矩形导轨滑块安装在磁铁底座上;所述磁铁底座设置有圆形孔洞,所述磁铁底座设置有加强筋。
8.根据权利要求7所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述磁铁底座通过直线矩形导轨滑块安装在所述机架总成的直线矩形导轨上;
9.根据权利要求7所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述磁铁组上表面产生的磁感线状态沿宽度方向疏密间隔分布,用于通过所述疏密间隔分布的磁感线状态的磁场变化控制柔性磁绒毛的摆动状态。
10.根据权利要求1所述的面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,其特征在于,所述抓取执行面板包括承载盘和柔性磁绒毛;所述承载盘安装在所述圆盘外壳的下端,所述柔性磁绒毛安装在承载盘上;
技术总结本发明涉及无感抓附技术领域,公开面向机械臂仿生磁控绒毛无感粘附的磁场纵向移动装置,包括:机架总成,驱动机构安装在机架总成上,用于设置驱动磁场发生机构的磁铁运动;磁场发生机构根据驱动机构的驱动产生驱动柔性磁绒毛的磁场;抓取执行面板,抓取执行面板根据磁场发生机构产生的磁场变化,以磁场驱动方式驱动抓取执行面板的柔性磁绒毛,执行抓取活动。本发明采用直流减速电机提供动力,磁铁底座由四根直线矩形导轨支撑,通过齿轮齿条将电机的转动变为磁铁底座的上下移动,从而完成磁铁及磁场的纵向运动。受猫舌头丝状乳头的启发,由柔性环氧树脂与磁性材料制成的绒毛可以顺应磁感线方向摆动,从而完成抓取功能。技术研发人员:牛士超,姜晓峰,权紫荆,陈萌,丁汉良,穆正知,李博,韩志武受保护的技术使用者:吉林大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50667.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
自动化竹笋去皮切分设备
下一篇
返回列表