焦炉炭化室狭小空间底部砖热修机器人系统及施工方法与流程
- 国知局
- 2024-07-08 10:53:39
本发明属于焦炉炭化室修复装置,更具体地,涉及一种焦炉炭化室狭小空间底部砖热修机器人系统及施工方法。
背景技术:
1、焦炉生产过程中,煤在隔绝空气的条件下装入炭化室,并经历一系列阶段,包括干燥、热解、熔融、粘结、固化和收缩,最终转化为焦炭。由于煤转化过程中的挤压和剥离作用,炭化室底部砖容易受到磨损、开裂甚至破损的影响。为了确保生产不受影响,需要在热态环境下对炭化室底部砖进行修复工作,包括受损面的检测、清理剔除和砌筑等。通过这些修复措施,保证焦炉的正常生产运行。
2、中国发明专利cn102925167b公开了焦炉热修炭化室底部砖砌筑装置,包括有长条状车架,车架的一端安装有车把手,另一端安装有伸缩杆,车轮安装在伸缩杆两侧,形成手推车结构,所述的伸缩杆上的沿车轮前进方向,依次安装有压平辊轮、灰槽和底砖砖夹,其中所述的底砖砖夹为两爪夹持型结构,并通过控制线连接有底砖砖夹控制把手,底砖砖夹控制把手安装在车把手上,所述的灰槽设有下料机构,并通过控制线连接有灰槽下料控制把手,灰槽下料控制把手也安装在车把手上。但此专利中,施工人员位于炭化室外部,无法对室内受损面进行精确评估,且该装置无法实现炭化室底部砖的挖补。
3、另一方面,机器人在焦炉砌筑方面的应用也日益发展。近年来,制造业的进步促使机器人在建筑领域的应用取得重要进展。相比传统的人工砌筑方式,机器人具有更大的承载能力、更高的准确率和效率。针对此,焦炉设计单位和耐火砖厂家已开始研发适用于机器人自动化砌筑焦炉的耐火砖和砌筑结构。施工单位也在尝试研制机器人参与的焦炉炉体砌筑系统。例如,中国发明专利cn115433595b公开了一种焦炉炉体砌筑系统,该系统由关节机器人、砌筑执行端、耐火泥浆输送机、地轨和垂直升降平台组成。该专利的砌筑系统可对焦炉炉体进行砌筑,但其整体体积过大,不适应用于炭化室内狭小空间内施工,且该系统无法在高温环境下对炭化室底部砖工作面进行检测和修复。
4、综上所述,目前公开的焦炉热修炭化室底部砖砌筑装置主要用于整体更换底部砖块,无法对深位炭化室底部砖块进行挖补修复。现有的焦炉炉体砌筑系统主要适用于新建焦炉,并且在高温工作环境中,机器人的正常运作面临热量积聚的挑战,有可能导致机器人性能下降、故障或报废。
5、因此,迫切需要研发一种能够在焦炉炭化室狭小空间底部进行砖块热修的机器人系统,并开发相应的施工方法,以实现无人化操作并确保在高温工作环境下对炭化室底部砖工作面进行检测和修复。
技术实现思路
1、针对现有技术的焦炉砌筑装置无法实现在狭小高温环境下对炭化室底部砖进行检测和修复,本发明提供一种焦炉炭化室狭小空间底部砖热修机器人系统及施工方法以解决此类问题。
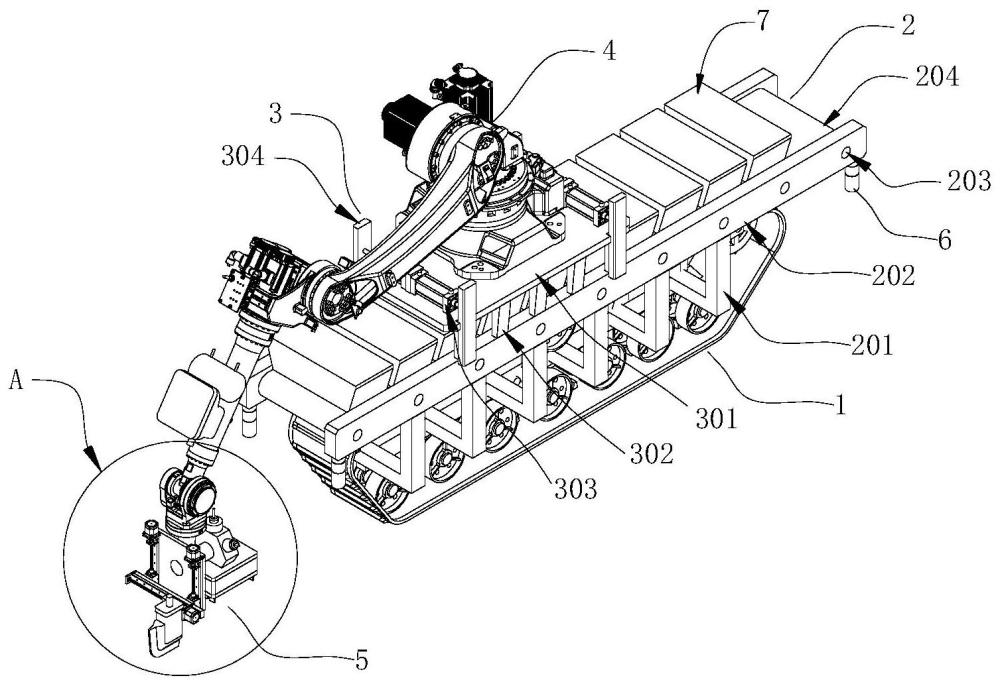
2、为实现上述目的,本发明提供一种焦炉炭化室狭小空间底部砖热修机器人系统,包括:用以支撑上部结构并能炭化室底部行走的履带行走机构;设于履带行走机构顶部的输料平台,其将砖块输送至取料处;设于输料平台顶部的基座,其对机器人进行固定支撑;设于机器人末端的砖块更换装置,包括t形支座,分别与t形支座底部前后端连接的灰浆敷设机构和清理结构;所述清理结构包括与t形支座底部后端转动连接的六边形座,以及分别设于六边形座侧边的铣砖组件、铣砖缝组件、夹砖组件及清灰组件;所述灰浆敷设机构包括位移组件和挤浆组件;设于输料平台侧边的成像机构;以及控制单元,其控制履带行走机构入场,对成像机构采集的焦炉炭化室底部砖扫描数据进行处理,规划修复行走路径及制动相应修复操作步骤,并控制机器人带动砖块更换装置对准破损处,使清理机构依次对破损处进行砖块铣削、砖缝铣削、夹取破损砖块、吹出残渣,完成清理作业,控制挤浆组件在位移组件的带动下将灰浆精准敷设在破损处底部和侧部,夹砖组件将输料平台上的砖块取下精准放入破损处,完成修复工作。
3、进一步地,所述机器人还包括设于壳体结构内的多个隔热层,以及设于内壳的水冷单元。
4、进一步地,所述机器人的关节部分设有关节防护罩,所述关节防护罩为万向结构,采用高温耐磨材料制作。
5、进一步地,述灰浆敷设机构还包括承载台,其中心处与t形支座底部前端垂直固定连接,其前端设有位移组件;所述位移组件包括x向直线滑台和y向直线滑台;所述y向直线滑台设有两组,沿y向平行设于承载台前端;所述x向直线滑台沿x向设于两组y向直线滑台上,由y向直线滑台带动沿y向直线位移;所述挤浆组件设于x向直线滑台上,由x向直线滑台带动沿x向直线位移;所述挤浆组件通过输送管与设于机器人上的储料箱连接,将灰浆敷设在破损处底部和侧部。
6、进一步地,所述六边形座为六角盘状结构,其中心处通过转动轴盘与t形支座后端转动连接,所述转动轴盘与控制单元通信连接,通过控制单元控制,转动轴盘带动六边形座精确转动至指定角度。
7、进一步地,所述铣砖组件包括铣砖刀具,通过铣砖刀具转动并在机器人带动下位移,对破损砖块进行精确铣削;所述铣砖缝组件包括砖缝铣刀,通过砖缝铣刀转动并在机器人带动下位移,对砖缝进行精确铣削清理;所述夹砖组件包括夹头,其在机器人带动下位移,对铣削碎破损的砖块进行夹取转运;所述清灰组件包括高压喷嘴,其与设于机器人上的高压气罐管道连接,在控制单元的控制下,吹出高压气体,将破损处的铣削残渣吹走。
8、进一步地,所述履带行走机构包括底架、履带、行走传动组件。
9、进一步地,所述输料平台设于履带行走机构顶部,其包括支架、架体、滚筒、带体和驱动组件;所述支架设有多组,多组支架底部分别对称固定设于底架两侧,其顶部对架体进行固定支撑;所述架体上平行间隔设有多个滚筒;所述驱动组件用于驱动滚筒转动;多个所述滚筒外周套设有带体,通过滚筒转动,从而带动带体往复运动进行输料作业。
10、进一步地,所述基座包括顶板、立柱、气缸和垫块;所述立柱设有多组,对称固定设于架体顶部两侧;所述顶板底部与多个立柱顶部固定连接,其用于承载安装固定机器人;所述气缸设有四组,两两对称固定设于顶板顶部,活塞杆端部与垫块固定连接。
11、按照本发明的另一个方面,还提供一种焦炉炭化室狭小空间底部砖热修机器人系统的施工方法包括如下步骤:
12、s100:上料,在料平台上放置砖块,补充耐火灰浆及高压气体;
13、s200:入场检测,履带行走机构将热修机器人系统输送至焦炉的炭化室内,通过成像机构开始从多角度对焦炉炭化室底部砖进行详细扫描,获取精准的热修信息并实时传递至炉外;
14、s300:根据焦炉成像数据进行规划修复行走路径及制定相应修复操作步骤;
15、s400:履带行走机构根据规划修复行走路径行走至指定点,机器人带动砖块更换装置对准破损处;
16、s500:清理机构依次对破损处进行砖块铣削、砖缝铣削、夹取破损砖块、吹出残渣,完成清理作业;
17、s600:挤浆组件将灰浆敷设在破损处底部和侧部;
18、s700:夹砖组件将输料平台上的砖块取下精准放入破损处,完成此处修复工作;
19、s800:履带行走机构根据规划修复行走路径行走至下一处破损处,机器人进行相应修复工作,直至完成炭化室内所有修复工作后退场。
20、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
21、1.本发明的热修机器人系统,通过将高精度的成像机构与智能控制单元相结合,实现了焦炉炭化室狭小空间内底部砖块的精确检测和修复;其中成像机构包括激光扫描仪、热成像相机、高温摄像机和图像采集设备等,能够提供高清晰度、高分辨率的焦炉炭化室底部砖块成像,实现准确的砖块缺陷识别和定位;控制单元则对成像数据进行分析和智能化判断,实现焦炉缺陷的定位、分类和优先级排序。
22、2.本发明的热修机器人系统,通过关节机器人具备灵活的运动能力和精准位置调整,可使铣砖组件、铣砖缝组件、夹砖组件、清灰组件和灰浆敷设机构等多个机构的协同工作,能够对焦炉炭化室底部受损砖块进行精确修复;同时为了确保机器人能够在高温环境中持久稳定地工作,在机器人的壳体结构中设置多个隔热层,以减少热量在壳体内部的传导;此外,机器人的内壳还设有水冷单元,水冷管敷设在内壳壁上,水冷单元通过运作,可以有效冷却壳体内部,降低温度的升高,提供良好的热防护,机器人关节部分采用万向结构提供灵活性和保护,防止灰尘、颗粒物和热辐射对关节的损坏,从而有效保障了机器人在高温环境下的稳定工作。
23、3.本发明的热修机器人系统,通过成像机构的高精度的成像检测,采用铣砖机构、铣砖缝机构、夹砖机构、清灰机构和灰浆敷设机构对破损处进行清理、敷浆、安装砖块,提高了焦炉炭化室底部砖检测和修复的准确性和效率,相较于传统的人工操作和修复工具,具备更高的精度和工作效率。
24、4.本发明的热修机器人系统,有效实现焦炉炭化室底部砖的精确检测和修复,提高了工作效率和修复质量,同时降低了热修风险,简化了热修流程,并实现了炭化室常态化的检测和热修复。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50828.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表