一种工业机器人抓取装置的制作方法
- 国知局
- 2024-07-08 10:54:40
本技术涉及工业机器人领域,尤其涉及一种工业机器人抓取装置。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。目前,市场上使用的都是一种相当复杂的机械手臂,这种机械手臂比较笨重,操作起来就显得相当的麻烦,而且也提高了成本,使工作变得更加繁重,增加了工作的时间,使工作效率变得低下,不能有效的完成工作任务,达到预期效果,花费大量不必要的精力。现有的机械手臂结构复杂,操作繁琐,使用不够灵活,夹持效果不好,实用性不强。
2、在现有的技术中,如中国专利号为:cn 207858835 u的“一种工业机器人用抓取装置”,其中包括固定底座、转动臂、支撑臂、支撑座、第一滑块、第二滑块、丝杠、第一夹持杆和第二夹持杆,转动臂的下部与支撑座之间转动连接,丝杠的左部开设的外螺纹和丝杠的右部外圈开设的外螺纹旋向相反设置,第一滑块的底端固定焊接设置有第二连接座,第二滑块的底端固定焊接设置有第一连接座,第一夹持杆的中部与第二夹持杆的中部之间通过铰接轴转动连接。本实用新型结构简单,操作方便,使用灵活,便于对物品的夹持转运,提高了工作效率,实用性强。
3、在现有的技术中进行物体抓取时,由于抓取臂结构简单,难以进行抓取角度调节,使得物体存放位置较为复杂时难以通过机器人快速抓取的问题。
4、因此,有必要提供一种工业机器人抓取装置解决上述技术问题。
技术实现思路
1、本实用新型提供一种工业机器人抓取装置,解决了由于抓取臂结构简单,难以进行抓取角度调节,使得物体存放位置较为复杂时难以通过机器人快速抓取的问题。
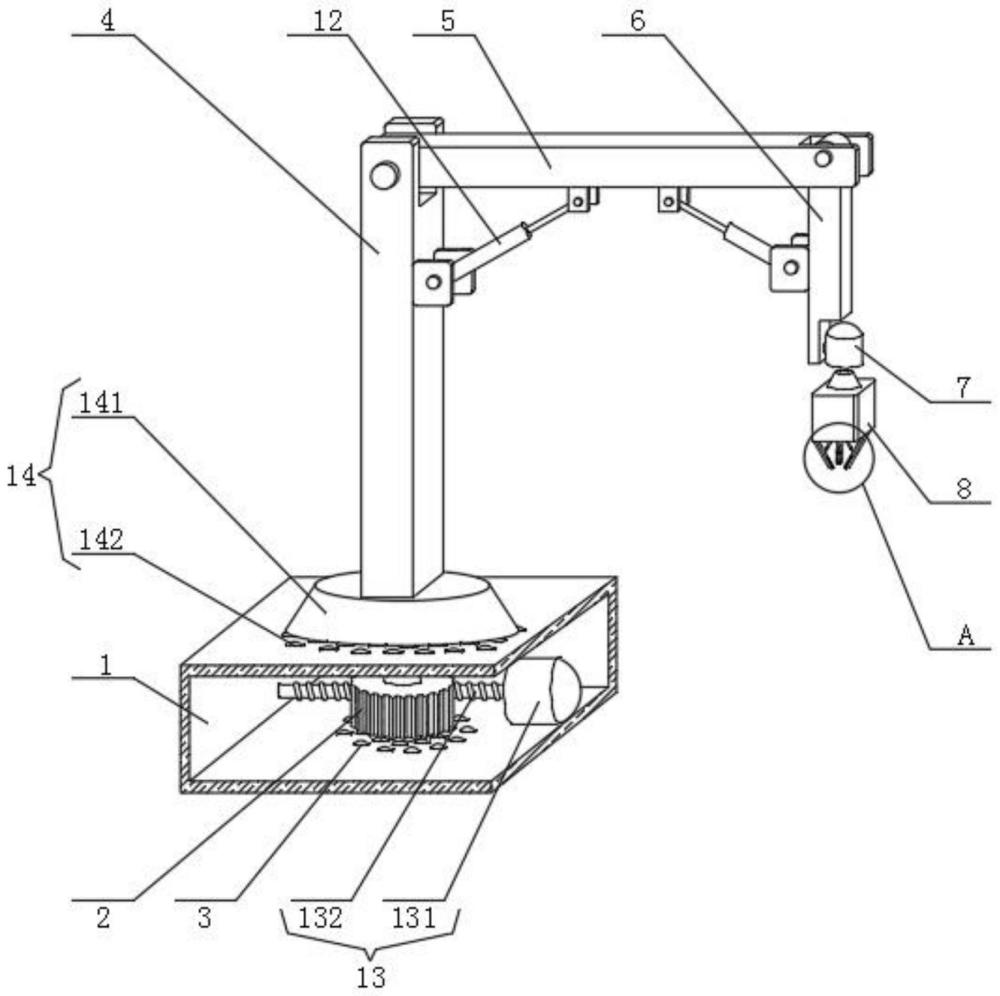
2、为解决上述技术问题,本实用新型提供的一种工业机器人抓取装置,包括底座,所述底座的内部活动套接有齿轮,所述底座内腔的底部活动套接有一号滑动球,所述齿轮的顶部固定连接有支撑柱,所述支撑柱的顶部活动套接有一号翻转柱,所述一号翻转柱的一端活动套接有二号翻转柱,所述二号翻转柱的一端固定安装有一号电机,所述一号电机的输出轴上固定套接有夹取箱,所述夹取箱的底部活动套接有夹持杆,所述夹取箱的底部安装有气缸,所述夹持杆的一端固定套接有防滑板,所述支撑柱的侧面活动套接有气动推杆,所述底座的内部设置有旋转机构,所述底座的顶部设置有稳定机构。
3、优选的,所述夹持杆位于夹取箱的正下方,且夹持杆的数量为三个。
4、优选的,所述气缸的一端活动套接在夹持杆的外部,且气缸的数量为三个。
5、优选的,所述防滑板的数量为三个,所述三个防滑板均匀分布在夹取箱的底部,所述防滑板的材质为橡胶材料。
6、优选的,所述一号滑动球的数量为若干个,所述若干个一号滑动球均匀分布在底座内腔的底部。
7、优选的,所述气动推杆的一端活动套接在一号翻转柱的底部,所述气动推杆的数量为两个。
8、优选的,所述旋转机构包括二号电机,所述二号电机固定安装在底座内腔的底部,所述二号电机的输出轴上固定连接有螺纹柱,所述螺纹柱与齿轮啮合连接。
9、优选的,所述稳定机构包括稳定罩,所述稳定罩固定套接在支撑柱的外部,所述底座的顶部活动套接有二号滑动球。
10、与相关技术相比较,本实用新型提供的一种工业机器人抓取装置具有如下
11、有益效果:
12、本实用新型提供一种工业机器人抓取装置,通过设置夹持杆,当在进行物体夹取时,启动一号电机,使得一号电机得以带动夹取箱进行旋转,即带动夹持杆进行旋转,从而达到夹持杆的角度调节效果,使得夹持杆得以对物体进行全方位夹持抓取,进而避免了抓取物体形状与存放位置的复杂,导致机器人难以进行精准快速抓取的问题,从而极大的提高了机器人抓取物体时的便利性;
13、通过设置旋转机构,当需要进行机器人抓取方向调节时,启动二号电机,使得二号电机得以带动螺纹柱进行旋转,即带动齿轮进行旋转,促使齿轮通过支撑柱带动夹取箱进行旋转,进而达到机器人的夹取方向调节效果,从而为不同方向的物体抓取带来了便利。
技术特征:1.一种工业机器人抓取装置,包括底座(1),其特征在于:所述底座(1)的内部活动套接有齿轮(2),所述底座(1)内腔的底部活动套接有一号滑动球(3),所述齿轮(2)的顶部固定连接有支撑柱(4),所述支撑柱(4)的顶部活动套接有一号翻转柱(5),所述一号翻转柱(5)的一端活动套接有二号翻转柱(6),所述二号翻转柱(6)的一端固定安装有一号电机(7),所述一号电机(7)的输出轴上固定套接有夹取箱(8),所述夹取箱(8)的底部活动套接有夹持杆(9),所述夹取箱(8)的底部安装有气缸(10),所述夹持杆(9)的一端固定套接有防滑板(11),所述支撑柱(4)的侧面活动套接有气动推杆(12),所述底座(1)的内部设置有旋转机构(13),所述底座(1)的顶部设置有稳定机构(14)。
2.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述夹持杆(9)位于夹取箱(8)的正下方,且夹持杆(9)的数量为三个。
3.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述气缸(10)的一端活动套接在夹持杆(9)的外部,且气缸(10)的数量为三个。
4.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述防滑板(11)的数量为三个,所述三个防滑板(11)均匀分布在夹取箱(8)的底部,所述防滑板(11)的材质为橡胶材料。
5.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述一号滑动球(3)的数量为若干个,所述若干个一号滑动球(3)均匀分布在底座(1)内腔的底部。
6.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述气动推杆(12)的一端活动套接在一号翻转柱(5)的底部,所述气动推杆(12)的数量为两个。
7.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述旋转机构(13)包括二号电机(131),所述二号电机(131)固定安装在底座(1)内腔的底部,所述二号电机(131)的输出轴上固定连接有螺纹柱(132),所述螺纹柱(132)与齿轮(2)啮合连接。
8.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述稳定机构(14)包括稳定罩(141),所述稳定罩(141)固定套接在支撑柱(4)的外部,所述底座(1)的顶部活动套接有二号滑动球(142)。
技术总结本技术提供一种工业机器人抓取装置。所述一种工业机器人抓取装置,包括底座,所述底座的内部活动套接有齿轮,所述底座内腔的底部活动套接有一号滑动球,所述齿轮的顶部固定连接有支撑柱,所述支撑柱的顶部活动套接有一号翻转柱,所述一号翻转柱的一端活动套接有二号翻转柱。本技术提供的一种工业机器人抓取装置具有通过设置夹持杆,当在进行物体夹取时,启动一号电机,使得一号电机得以带动夹取箱进行旋转,即带动夹持杆进行旋转,从而达到夹持杆的角度调节效果,使得夹持杆得以对物体进行全方位夹持抓取,进而避免了抓取物体形状与存放位置的复杂,导致机器人难以进行精准快速抓取的问题,从而极大的提高了机器人抓取物体时的便利性。技术研发人员:李金铎,简德彪受保护的技术使用者:厦门鸿智达科技有限公司技术研发日:20231116技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/50941.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。