一种船舶焊接机器人
- 国知局
- 2024-07-08 10:56:11
本发明属于焊接机器人领域,具体涉及一种船舶焊接机器人。
背景技术:
1、随着世界制造业的快速发展,这使得焊接技术实现了更高的自动化。因为,作为自动化的一个标志,焊接机器人有很高的稳定及生产效率。如果使用焊接机器人,工作环境可以得到改善。焊接机器人能够连续不断的进行工作,保持高效工作的同时也大大降低了成本。如果焊接参数设置为一次,焊接后的质量能够得到高度的统一,加强焊接工作完成的同一性,解决了因焊接工人本身因素对焊接成果的影响。焊接机器人虽然改善了人们的工作环境,但它并没有展现出焊接机器人的灵活性。
2、所以,需要人们通过外部装备的辅助,帮助焊接及机器人达到预定的焊接位置,并完成所设定的目标任务。目前的解决方案是用大量的机器人工作来代替人类生产。虽然人工焊接的问题已经解决,但使用大型机械工作场所焊接不仅大大增加了焊接的成本,而且还消耗了大量的能源。除上述问题外,焊接设备遇到的问题也很严重,其适应性很差,根本无法完成焊接作业。移动式焊接设备配备有焊接机构和焊接操作人员,移动式焊接设备都有支架,用焊接手完成的焊接工作。这种设备代替工人焊接工作的目标同时,而且作业优势高于大型的焊接机器人,成本和能源使用都比较低。它符合大型工厂对焊接技术的生产要求,所以它非常重要。
技术实现思路
1、针对上述问题,本技术实现要素:是一种移动式焊接机器人。主要研究目标是完成加强筋之间的横向跨越和纵向平移把焊枪放置到目标部位,完成在船舶双层壳体中对焊缝的焊接工作。
2、为了达到上述目的本发明采取的技术方案是:
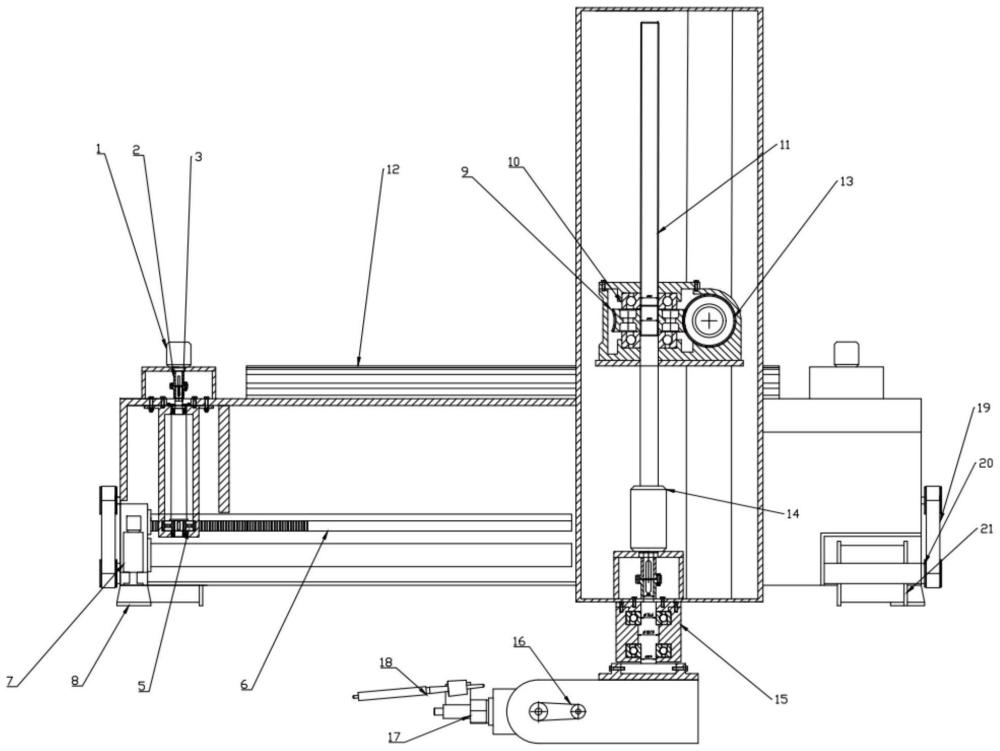
3、所述的横向跨越机构的具体结构为:电机(1)与转动轴(3)通过联轴器(2)相连,传动轴(3)与齿轮(5)相连,齿轮(5)与齿条(6)啮合,齿条(6)与液压缸(7)相连,液压缸(7)与支撑座(8)相连;
4、所述的焊接机械臂的具体结构为:电机(23)与蜗杆(13)连接,蜗杆(13)与涡轮(9)啮合,涡轮(9)与移动丝杠(11)啮合,移动丝杠(11)与旋转轴(14)相连,旋转轴(14)与旋转轴(16)通过连接器(15)相连,旋转轴(16)与旋转轴(17)相连,旋转轴(17)与焊枪(18)相连,电机(24)与同步带滑轨(12)连接;
5、所述的纵向移动机构的具体结构为:电机(22)与传动带(19)连接,传动带(19)与传动轴(20)相连,传动轴(20)与车轮(21)相连。
6、本发明的有益效果为:
7、(1)本发明的船舶焊接机器人,通过对焊接工作分析,移动焊接机器人在加强筋纵向移动时,需沿直线方向移动,所以轮子采用车轮置于轴中间,轴两端连接外壳的形式。因为移动焊接机器人整体形状趋向于矩形,所以在焊接机器人底部的四个角,安装四个轮子,共同带动焊接机器人移动。焊接机器人轮子的驱动方式通过皮带的传输来实现。带传动的特点是传动平稳,能缓冲吸振,结构简单,成本低,使用维护方便,具有良好的柔性和灵活性。
8、(2)本发明的船舶焊接机器人,穿越机构是移动焊接机器人运动中的基本结构。穿越机构的设计决定了移动焊接机器人可以在两个相邻的加强筋之间顺利移动。
技术特征:1.一种船舶焊接机器人,其特征在于包括横向跨越机构,焊接机械臂,纵向移动机构;
2.根据权利要求1所述的一种船舶焊接机器人,其特征在于,所述的横向跨越机构由电机(1)带动传动轴(3)转动,传动轴(3)带动齿轮(5)和与其啮合的齿条(6)转动,电机(1)正反转决定齿条的伸缩,即跨越机构的伸缩,跨越机构跨越到下一个加强筋轨道后,液压缸(7)顶起支撑座(8),再由电机(4)控制焊接机械臂横移过去,然后液压缸(7)复位恢复到原来的高度,通过电机(1)转动使齿轮(5)和齿条(6)缩回原来的长度,以达到跨越轨道的目的。
3.根据权利要求1所述的一种船舶焊接机器人,其特征在于,所述的焊接机械臂由电机(23)的转动带动蜗杆(13)的转动,蜗杆(13)转动带动与其啮合的涡轮(9)转动,涡轮(9)转动带动其内啮合的丝杠(11)进行上下移动,电机(23)的正反转决定丝杠(11)的上下移动,旋转轴(14)带动焊接机械臂左右转动,旋转轴(16)和旋转轴(17)带动焊枪(18)进行焊接位置调整,由电机(24)带动焊接机械臂在同步带滑轨(12)上横移调整焊接位置。
4.根据权利要求1所述的一种船舶焊接机器人,其特征在于,所述的纵向移动机构由电机(22)带动传动带(19),传动带(19)转动带动传动轴(20)转动,转动轴(20)带动四个轮子(21)来实现纵向移动。
技术总结本发明提供了一种船舶焊接机器人,主要用于船舶双层壳体焊接任务。焊接机器人的结构由焊接机器臂和移动平台组成,具有稳定的移动和准确的焊接能力。焊接机械臂由三个旋转关节控制,可以有效的调整焊接位置。横向跨越机构通过齿轮齿条进行伸缩,可以使焊接机械臂跨越到下一个加强筋轨道。纵向移动机构通过底部四个角安装的车轮,在加强筋轨道上进行纵向直线移动,可以使焊接机器人在船舶双层壳体内灵活移动。通过两个机构的相互配合,焊接机器人可以在船舶双层壳体内完成精确的焊接作业。技术研发人员:靳雨琦受保护的技术使用者:哈尔滨理工大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51093.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表