接线机器人和接线工作台
- 国知局
- 2024-07-08 10:58:13
本发明属于机器人,具体的为一种接线机器人和接线工作台。
背景技术:
1、电缆敷设是变电站工程中的重要工序,也是工作量最大、技术要求最高、环境条件最复杂的工序之一。电缆敷设不仅涉及电缆的型号、截面、敷设方式、弯曲半径、敷设深度、间距、标识、保护等多方面的因素,还要适应地形、交叉、障碍等多种环境因素。目前,变电站工程中的电缆敷设主要通过人工和助力的工具完成电缆的搬运、放置、牵引和固定等操作,敷设的效率低、成本高,尚缺乏电缆敷设机械化方案,亟需开发更高效、更灵活、更智能的电缆敷设机械化技术及装备。
2、目前市面上存在一些关于二次接线的设备,如剪线剥线器、自动套号码管器等,但这些设备普遍存在几个问题:一是体积较大,缺乏灵活性,不适应狭小接线空间;二是功能单一,集成度较差,仅能完成二次接线流程中的一个或几个特定的功能,在完成其对应功能后,还需人为进行其他诸如将芯线与端子排固定等二次接线任务;三是智能性较差,面对配电柜中复杂的电气系统,此类设备无法具备高度智能化和复杂的算法来应对。但目前市面上还没有一款针对配电柜二次接线的接线机器人。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种接线机器人和接线工作台,能够实现二次接线操作,并能够减少人工介入,提升接线稳定性并降低人力成本。
2、为达到上述目的,本发明提供如下技术方案:
3、本发明首先提出了一种接线工作台,包括支架,所述支架上安装有操作平台和机械臂;
4、所述机械臂的末端安装有用于夹取芯线的机械手爪;
5、所述操作平台上设有用于剥离芯线表皮的剪线剥线模块和用于在芯线上套号码管的套号码管模块;
6、所述机械手爪夹取芯线至所述剪线剥线模块内进行表皮剥离作业;
7、所述机械手爪将表皮剥离后的芯线夹取至所述套号码管模块内进行套号码管作业;
8、所述机械手爪将完成套号码管的芯线夹取至端子处进行二次接线作业。
9、进一步,所述机械臂设为两个并分别位于所述操作平台的左右两侧。
10、进一步,所述机械臂上安装有相机。
11、进一步,所述操作平台与所述支架之间设有伸缩驱动组件;所述伸缩驱动组件包括设置在所述操作平台底面上的伸缩滑轨、安装在所述支架上的伸缩滑块和用于驱动所述操作平台相对于所述支架沿着所述伸缩滑轨移动的伸缩驱动机构。
12、进一步,所述伸缩驱动机构包括丝杆、与所述丝杆配合的丝杆螺母和与所述丝杆传动连接的丝杆电机,所述丝杆螺母安装在所述操作平台的底面上,所述支架上设有电机座,所述丝杆电机安装在所述电机座上。
13、进一步,所述操作平台的上方设有套管操作台,所述套号码管模块安装在所述套管操作台上,所述剪线剥线模块安装在所述操作平台上并位于所述套管操作台的下方。
14、进一步,所述套号码管模块包括滚筒组件、号管驱动组件、号管夹持组件和号管剪切组件;所述号管剪切组件位于所述号管夹持组件与所述号管驱动组件之间,所述号管驱动组件位于所述滚筒组件与所述号管剪切组件之间;
15、所述滚筒组件包括滚筒支架,所述滚筒支架上设有用于缠绕号码管的滚筒;
16、所述号管驱动组件包括转轮组件和转轮驱动机构;所述转轮组件包括相对设置的主动转轮和从动转轮,所述转轮驱动组件包括与所述主动转轮传动连接的转轮电机;所述转轮电机驱动所述主动转轮转动,并利用摩擦力作用驱动位于所述主动转轮和从动转轮之间的号码管向前进给;
17、所述号管夹持组件包括用于夹持号码管的夹爪气缸和用于驱动所述夹爪气缸移动以将号码管套在线芯上的套管驱动机构;所述套管驱动机构包括固定安装的移动滑轨、与所述移动滑轨滑动配合的移动滑块和用于驱动所述夹爪气缸沿着所述移动滑轨移动的移动气缸,所述移动滑块与所述夹爪气缸固定连接;
18、所述号管剪切组件包括固定安装的龙门架、安装在所述龙门架上的剪切气缸和安装在所述剪切气缸的活塞杆上用于剪切号码管的剪切刀片;
19、所述夹爪气缸的夹爪位于所述剪切刀片背向所述号管驱动组件的一侧。
20、进一步,所述滚筒组件与所述号管驱动组件之间还设有导向组件,所述导向组件包括用于导向号码管的导向板。
21、进一步,所述剪线剥线模块包括用于切断芯线表皮的剥切组件和用于将切断的表皮从芯线上抽离的脱皮组件;所述脱皮组件位于所述剥切组件的出料侧,所述剥切组件的进料侧设有进料限位组件;
22、所述进料限位组件包括固定安装在侧板和安装在所述侧板上用于限制芯线进料位置的限位管;
23、所述剥切组件包括剥切刀片组件和剥切动力组件;所述剥切刀片组件包括立柱和刀片固定板,所述立柱上设有竖直轨道,所述刀片固定板与所述竖直轨道滑动配合,所述刀片固定板上安装有剥切刀片;所述剥切动力组件包括剥切舵机,所述剥切舵机与所述刀片固定板之间设有连杆以驱动剥切刀片上下移动以切断芯线的表皮;
24、所述脱皮组件包括压线组件和移动组件;所述压线组件包括压线板和驱动所述压线板压在芯线表皮上的压线舵机;所述移动组件用于驱动所述压线组件沿着所述限位管的轴线方向移动以将切断的表皮从芯线上抽出。
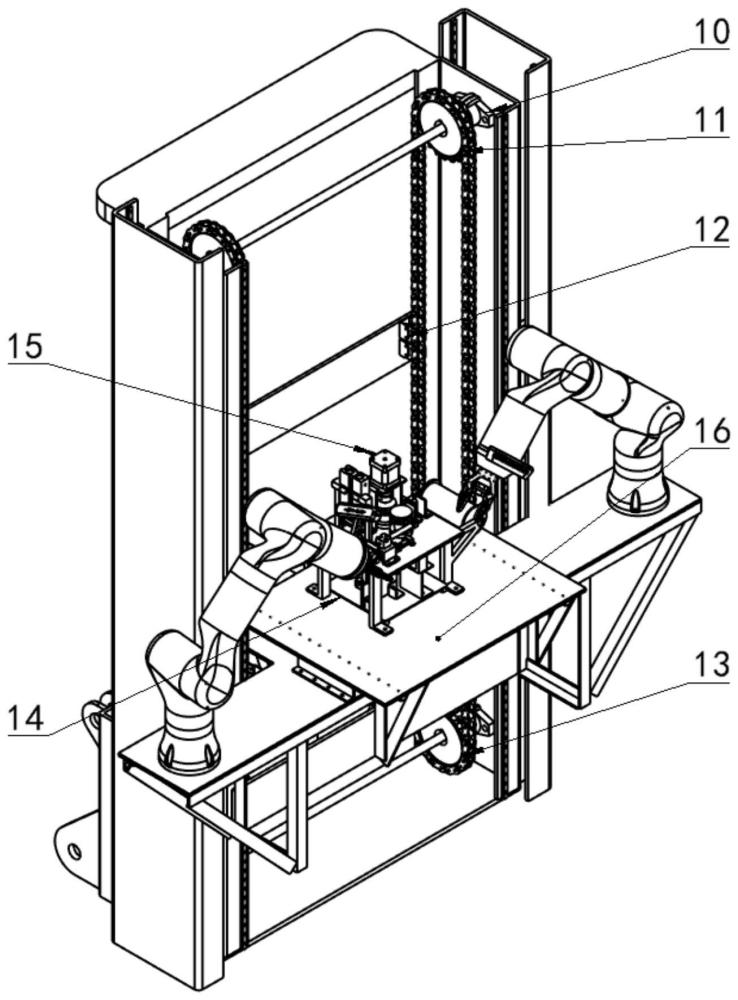
25、本发明还提出了一种接线机器人,包括框架和如上所述的接线工作台,所述框架上设有升降轨道,所述支架安装在所述升降轨道上,所述框架上设有用于驱动所述支架沿着所述升降轨道移动的升降驱动组件。
26、本发明的有益效果在于:
27、本发明的接线工作台,通过在支架上设置操作平台和机械臂,并在操作平台上设置剪线剥线模块和套号码管模块;如此,利用安装在机械臂上的机械手爪夹持芯线,首先利用机械手爪将芯线夹持到剪线剥线模块以剥离芯线的表皮,而后将芯线夹持到套号码管模块,将经套号码管模块切割得到的套号码管套在芯线去除表皮的端部;最后将芯线夹持到端子处,将芯线插入到端子内以完成二次接线;即本发明的接线工作台能够实现二次接线操作,整个接线过程均利用机械臂及机械手爪实现芯线在剪线剥线模块、套号码管模块和端子之间转移,不需要人工介入,能够提升接线稳定性并降低人力成本。
技术特征:1.一种接线工作台,其特征在于:包括支架(8),所述支架(8)上安装有操作平台(16)和机械臂(6);
2.根据权利要求1所述的接线工作台,其特征在于:所述机械臂(6)设为两个并分别位于所述操作平台(16)的左右两侧。
3.根据权利要求1所述的接线工作台,其特征在于:所述机械臂(6)上安装有相机(7)。
4.根据权利要求1所述的接线工作台,其特征在于:所述操作平台(16)与所述支架(8)之间设有伸缩驱动组件;所述伸缩驱动组件包括设置在所述操作平台(16)底面上的伸缩滑轨(24)、安装在所述支架(8)上的伸缩滑块(23)和用于驱动所述操作平台(16)相对于所述支架(8)沿着所述伸缩滑轨(24)移动的伸缩驱动机构。
5.根据权利要求4所述的接线工作台,其特征在于:所述伸缩驱动机构包括丝杆(20)、与所述丝杆(20)配合的丝杆螺母(21)和与所述丝杆(20)传动连接的丝杆电机(17),所述丝杆螺母(21)安装在所述操作平台(16)的底面上,所述支架(8)上设有电机座(18),所述丝杆电机(17)安装在所述电机座(18)上。
6.根据权利要求1所述的接线工作台,其特征在于:所述操作平台(16)的上方设有套管操作台,所述套号码管模块(15)安装在所述套管操作台上,所述剪线剥线模块(14)安装在所述操作平台(16)上并位于所述套管操作台的下方。
7.根据权利要求1-6任一项所述的接线工作台,其特征在于:所述套号码管模块(15)包括滚筒组件、号管驱动组件、号管夹持组件和号管剪切组件;所述号管剪切组件位于所述号管夹持组件与所述号管驱动组件之间,所述号管驱动组件位于所述滚筒组件与所述号管剪切组件之间;
8.根据权利要求7所述的接线工作台,其特征在于:所述滚筒组件与所述号管驱动组件之间还设有导向组件,所述导向组件包括用于导向号码管的导向板(26)。
9.根据权利要求1-6任一项所述的接线工作台,其特征在于:所述剪线剥线模块(14)包括用于切断芯线表皮的剥切组件和用于将切断的表皮从芯线上抽离的脱皮组件;所述脱皮组件位于所述剥切组件的出料侧,所述剥切组件的进料侧设有进料限位组件;
10.一种接线机器人,其特征在于:包括框架和如权利要求1-9任一项所述的接线工作台,所述框架上设有升降轨道,所述支架(8)安装在所述升降轨道上,所述框架上设有用于驱动所述支架(8)沿着所述升降轨道移动的升降驱动组件。
技术总结本发明公开了一种接线工作台,包括支架,支架上安装有操作平台和机械臂;机械臂的末端安装有用于夹取芯线的机械手爪;操作平台上设有用于剥离芯线表皮的剪线剥线模块和用于在芯线上套号码管的套号码管模块;机械手爪夹取芯线至剪线剥线模块内进行表皮剥离作业;机械手爪将表皮剥离后的芯线夹取至套号码管模块内进行套号码管作业;机械手爪将完成套号码管的芯线夹取至端子处进行二次接线作业。本发明还公开了一种接线机器人,包括框架和如上的接线工作台,框架上设有升降轨道,支架安装子啊升降轨道上,框架上设有用于驱动支架8沿着升降轨道移动的升降驱动组件。技术研发人员:李奇敏,李岩,宋晓帆,吴聪颖,祖令,方宁,陈安雨,潜未,赵红阳,肖智宏,袁兆祥,许永平受保护的技术使用者:重庆大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51294.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表