一种机器人用高精度行走运动控制器的制作方法
- 国知局
- 2024-07-08 11:03:04
本技术涉及机器人,特别是一种机器人用高精度行走运动控制器。
背景技术:
1、目前市场上机器人内部传动构件均采用齿轮或皮带传动的方式进行传动,但采用齿轮传动长时间的使用会出现齿轮磨损严重,造成反应迟钝的现象;采用皮带传动的方式进行传动,长时间使用会使皮带松动,大大减少使用寿命,从而影响机器人头部的转动。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种机器人用高精度行走运动控制器。
2、本实用新型的目的通过以下技术方案来实现:
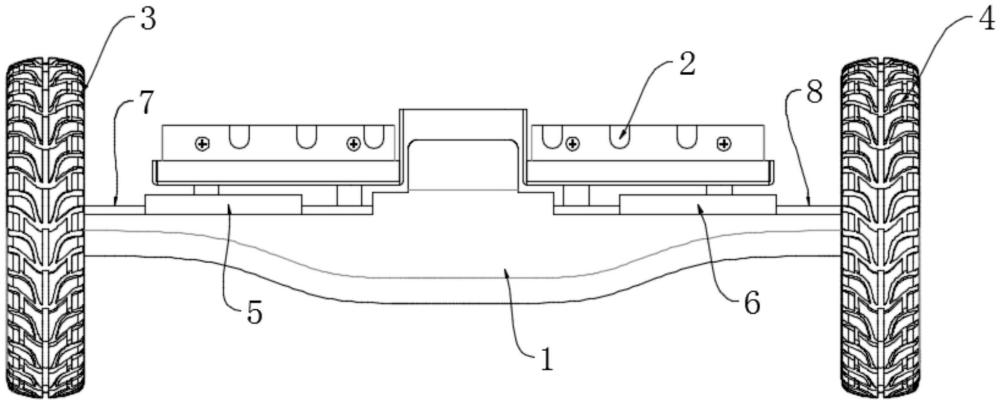
3、一种机器人用高精度行走运动控制器,包括承载底盘和提供电力的电源、左右侧轮子、以及用于控制机器人行走的左侧高速电机与右侧高速电机、电机驱动控制器,所述电源安装设置在底盘的上方,左侧高速电机采用直驱的连接方式安装于机器人左侧行走轮上,右侧高速电机采用直驱的连接方式安装于机器人右侧行走轮上;所述左右两侧的高速电机以所述底盘的中轴线为中心对称设置。
4、更进一步的技术方案是,所述左侧高速电机和所述右侧高速电机均安装有编码器。
5、更进一步的技术方案是,所述电机驱动控制器包括第一电机驱动控制器和第二电机驱动控制器,所述第一电机驱动控制器安装所述左侧轮子中,所述第二电机驱动控制器安装在所述右侧轮子中。
6、更进一步的技术方案是,所述左侧高速电机与右侧高速电机均采用高速电机控制,可以达到每秒大于7200°的超高转速。
7、本实用新型具有以下优点:
8、本实用新型电机驱动采用直驱方式进行负载的驱动,从而彻底避免因皮带传动带来的皮带松动、齿轮传动带来的齿轮磨损等状况,极大延长了该产品的使用寿命,并给予该产品在现实应用中高频运转的可靠保障。
技术特征:1.一种机器人用高精度行走运动控制器,其特征在于:包括承载底盘和提供电力的电源、左右侧轮子、以及用于控制机器人行走的左侧高速电机与右侧高速电机、电机驱动控制器,所述电源安装设置在底盘的上方,左侧高速电机采用直驱的连接方式安装于机器人左侧行走轮上,右侧高速电机采用直驱的连接方式安装于机器人右侧行走轮上;所述左右两侧的高速电机以所述底盘的中轴线为中心对称设置。
2.根据权利要求1所述的一种机器人用高精度行走运动控制器,其特征在于:所述左侧高速电机和所述右侧高速电机均安装有编码器。
3.根据权利要求1所述的一种机器人用高精度行走运动控制器,其特征在于:所述电机驱动控制器包括第一电机驱动控制器和第二电机驱动控制器,所述第一电机驱动控制器安装所述左侧轮子中,所述第二电机驱动控制器安装在所述右侧轮子中。
4.根据权利要求1所述的一种机器人用高精度行走运动控制器,其特征在于:所述左侧高速电机与右侧高速电机均采用高速电机控制,可以达到每秒大于7200°的超高转速。
技术总结本技术公开了一种机器人用高精度行走运动控制器,包括承载底盘和提供电力的电源、左右侧轮子、以及用于控制机器人行走的左侧高速电机与右侧高速电机、电机驱动控制器,所述电源安装设置在底盘的上方,左侧高速电机采用直驱的连接方式安装于机器人左侧行走轮上,右侧高速电机采用直驱的连接方式安装于机器人右侧行走轮上;所述左右两侧的高速电机以所述底盘的中轴线为中心对称设置。本技术电机驱动采用直驱方式进行负载的驱动,从而彻底避免因皮带传动带来的皮带松动、齿轮传动带来的齿轮磨损等状况,极大延长了该产品的使用寿命,并给予该产品在现实应用中高频运转的可靠保障。技术研发人员:魏冀受保护的技术使用者:河南弘兴电子科技有限公司技术研发日:20230522技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51718.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表