基于云平台的工业机器人智能控制系统及方法与流程
- 国知局
- 2024-07-08 11:04:08
本申请涉及工业机器人的智能化控制领域,且更为具体地,涉及一种基于云平台的工业机器人智能控制系统及方法。
背景技术:
1、随着工业技术的迅速进步,工业机器人在当今工业智能化生产中扮演着关键角色,成为制造业全面自动化的重要组成部分。随着生产线任务的日益繁重,仍然使用人工进行一些繁琐的工件分类已经无法使企业生产产能得到提高。随着工作量的增加,人工分拣的错误率也逐渐上升,影响生产质量。
2、因此,期待一种基于云平台的工业机器人智能控制系统及方法,基于计算机视觉和图像处理技术对工业机器人进行控制,以实现对工件的智能化分拣。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种基于云平台的工业机器人智能控制系统及方法,其首先采集待分析工件在不同拍摄角度下的图像数据、不同类型的参考工件图像数据以及不同类型的参考工件的五元位置坐标作为输入数据,接着使用计算机视觉和图像处理技术对这些输入数据进行特征提取和分析以生成待分析工件的目标位置,然后工业机器人基于所述目标位置对所述待分析工件进行精准的分拣操作。这样,有助于实现对工件的智能化分拣。
2、根据本申请的第一方面,提供了一种基于云平台的工业机器人智能控制系统,其包括:
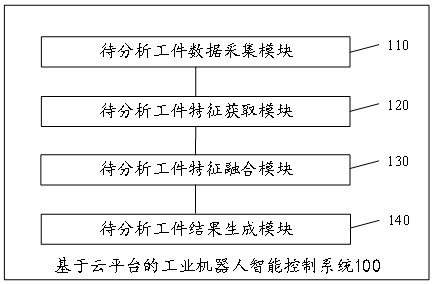
3、待分析工件数据采集模块,用于采集待分析工件在不同拍摄角度下的图像数据、不同类型的参考工件图像数据以及不同类型的参考工件的五元位置坐标;
4、待分析工件特征获取模块,用于对所述待分析工件在不同拍摄角度下的图像数据、所述不同类型的参考工件图像数据以及所述不同类型的参考工件的五元位置坐标分别进行特征提取和分析以得到待分析工件类型特征矩阵以及参考工件位置特征矩阵;
5、待分析工件特征融合模块,用于对所述待分析工件类型特征矩阵以及所述参考工件位置特征矩阵进行特征融合以得到待分析工件位置特征矩阵;
6、待分析工件结果生成模块,用于基于所述待分析工件位置特征矩阵以生成待分析工件的目标位置。
7、结合本申请的第一方面,在本申请的第一方面的一种基于云平台的工业机器人智能控制系统中,所述待分析工件特征获取模块,包括:待分析工件特征提取单元,用于对所述待分析工件在不同拍摄角度下的图像数据进行特征编码以得到待分析工件全局特征向量;参考工件特征提取单元,用于对所述不同类型的参考工件图像数据进行特征编码以得到参考工件综合特征向量;工件类型特征获取单元,用于使用联合编码器将所述待分析工件全局特征向量和所述参考工件综合特征向量进行特征融合以得到所述待分析工件类型特征矩阵;参考工件位置特征提取单元,用于对所述不同类型的参考工件的五元位置坐标进行特征编码以得到所述参考工件位置特征矩阵。
8、根据本申请的第二方面,提供了一种基于云平台的工业机器人智能控制方法,其包括:
9、采集待分析工件在不同拍摄角度下的图像数据、不同类型的参考工件图像数据以及不同类型的参考工件的五元位置坐标;
10、对所述待分析工件在不同拍摄角度下的图像数据、所述不同类型的参考工件图像数据以及所述不同类型的参考工件的五元位置坐标分别进行特征提取和分析以得到待分析工件类型特征矩阵以及参考工件位置特征矩阵;
11、对所述待分析工件类型特征矩阵以及所述参考工件位置特征矩阵进行特征融合以得到待分析工件位置特征矩阵;
12、基于所述待分析工件位置特征矩阵以生成待分析工件的目标位置。
13、结合本申请的第二方面,在本申请的第二方面的一种基于云平台的工业机器人智能控制方法中,基于所述待分析工件位置特征矩阵以生成待分析工件的目标位置,包括:待分析工件位置特征提取单元,用于将所述待分析工件位置特征矩阵通过基于卷积神经网络模型的待分析工件位置特征提取模块以得到待分析工件位置生成特征向量;待分析工件位置特征优化单元,用于对所述待分析工件位置生成特征向量进行基于分布方向的概率响应性调整以得到优化待分析工件位置生成特征向量;待分析工件位置生成单元,用于将所述优化待分析工件位置生成特征向量通过生成器以生成所述待分析工件的目标位置。
14、与现有技术相比,本申请提供的一种基于云平台的工业机器人智能控制系统及方法,其首先采集待分析工件在不同拍摄角度下的图像数据、不同类型的参考工件图像数据以及不同类型的参考工件的五元位置坐标作为输入数据,接着使用计算机视觉和图像处理技术对这些输入数据进行特征提取和分析以生成待分析工件的目标位置,然后工业机器人基于所述目标位置对所述待分析工件进行精准的分拣操作。这样,有助于实现对工件的智能化分拣。
技术特征:1.一种基于云平台的工业机器人智能控制系统,其特征在于,包括:
2.根据权利要求1所述的基于云平台的工业机器人智能控制系统,其特征在于,所述待分析工件特征获取模块,包括:
3.根据权利要求2所述的基于云平台的工业机器人智能控制系统,其特征在于,所述待分析工件特征提取单元,包括:
4.根据权利要求3所述的基于云平台的工业机器人智能控制系统,其特征在于,所述参考工件特征提取单元,包括:
5.根据权利要求4所述的基于云平台的工业机器人智能控制系统,其特征在于,所述参考工件位置特征提取单元,包括:
6.根据权利要求5所述的基于云平台的工业机器人智能控制系统,其特征在于,所述待分析工件结果生成模块,包括:
7.根据权利要求6所述的基于云平台的工业机器人智能控制系统,其特征在于,所述待分析工件位置特征优化单元,包括:
8.根据权利要求7所述的基于云平台的工业机器人智能控制系统,其特征在于,对所述待分析工件位置生成特征向量进行基于分布方向的概率响应性调整以得到调制特征向量,包括:
9.一种基于云平台的工业机器人智能控制方法,其特征在于,包括:
10.根据权利要求9所述的基于云平台的工业机器人智能控制方法,其特征在于,对所述待分析工件在不同拍摄角度下的图像数据、所述不同类型的参考工件图像数据以及所述不同类型的参考工件的五元位置坐标分别进行特征提取和分析以得到待分析工件类型特征矩阵以及参考工件位置特征矩阵,包括:
技术总结本申请涉及工业机器人的智能化控制领域,其具体地公开了一种基于云平台的工业机器人智能控制系统及方法,其首先采集待分析工件在不同拍摄角度下的图像数据、不同类型的参考工件图像数据以及不同类型的参考工件的五元位置坐标作为输入数据,接着使用计算机视觉和图像处理技术对这些输入数据进行特征提取和分析以生成待分析工件的目标位置,然后工业机器人基于所述目标位置对所述待分析工件进行精准的分拣操作。这样,有助于实现对工件的智能化分拣。技术研发人员:赵成俊,黄映瑜,吴庆欢,周莎受保护的技术使用者:昆明芯之达科技有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51828.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表