自主驱动机器人和使用该自主驱动机器人的物品运输方法与流程
- 国知局
- 2024-07-08 11:06:42
本发明构思涉及自主驱动机器人和使用该自主驱动机器人的物品运输方法,并且更具体地,涉及具有提高的运输效率的自主驱动机器人和使用该自主驱动机器人的物品运输方法。
背景技术:
1、在半导体产品的生产过程期间,执行数百道工艺直到获得最终产品。此外,在半导体制造过程期间发生成百上千的物品流动。为了防止半导体材料在物品运输过程期间发生污染、损坏和传递事故,利用自主驱动机器人作为半导体制造线中的物品运输自动化系统。
2、自主驱动机器人包括空中搬运系统(oht)、自动引导车辆(agv)、自主移动机器人(amr)等。然而,使用自主驱动机器人运输物品的效率正成为问题。
技术实现思路
1、本发明构思的各方面提供了具有提高的运输效率的自主驱动机器人和使用该自主驱动机器人的物品运输方法。
2、本发明构思的目的不限于上述目的,但本领域技术人员将通过下面的描述清楚地理解本文中未描述的其他目的。
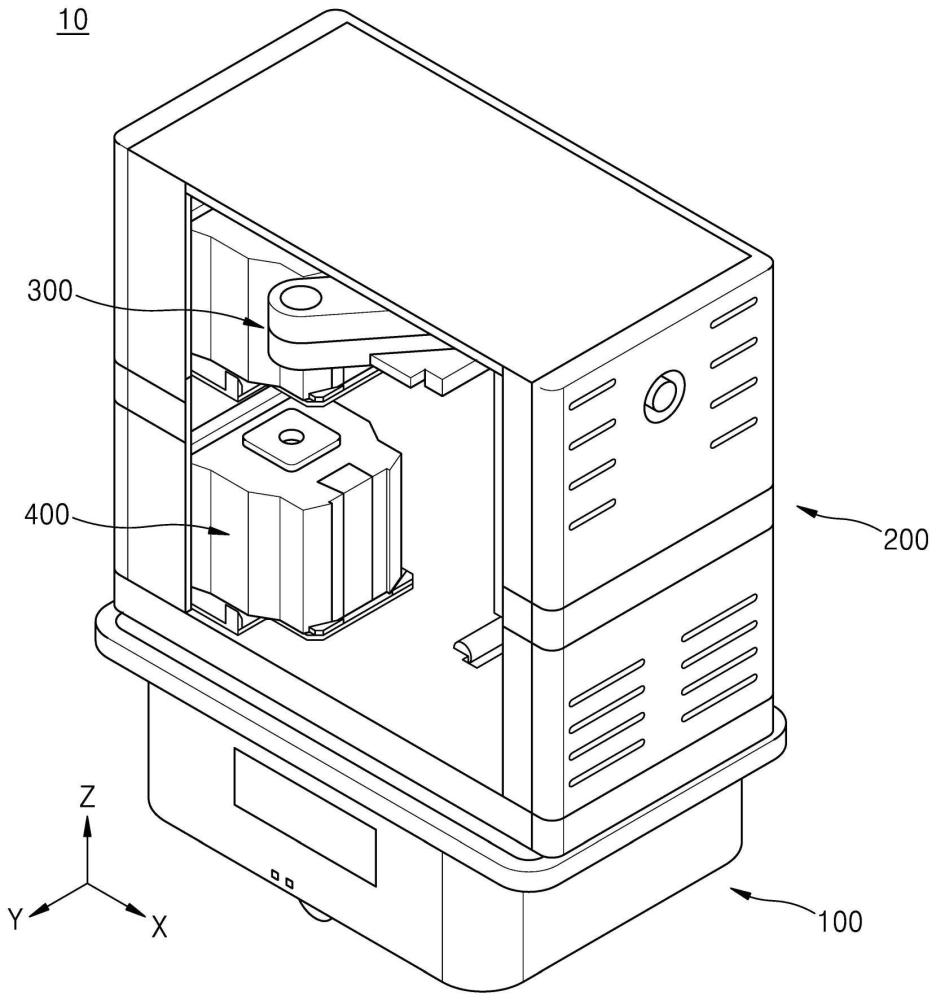
3、本发明构思的方面提供了下文所描述的自主驱动机器人。根据本发明构思的一方面,提供了一种自主驱动机器人,该自主驱动机器人包括:储存单元,所述储存单元包括壳体和搁板,所述壳体提供用于储存物品的空间,所述搁板设置在所述壳体内部并且被配置成使得所述物品被装载在所述搁板上;操纵器,所述操纵器包括线性致动器和选择顺应性关节型机器人臂,所述线性致动器设置在所述壳体内部且在竖直方向上延伸,所述选择顺应性关节型机器人臂被称为scara臂并联接到所述线性致动器;和运输单元,所述运输单元联接到所述储存单元并且被配置成移动所述储存单元,其中,在所述储存单元中设置有多个搁板,所述多个搁板中的一些搁板被设置成与所述壳体的一个内壁相邻且在所述竖直方向上彼此间隔开,并且其他搁板被设置成与面向所述一个内壁的另一内壁相邻且在所述竖直方向上彼此间隔开,并且其中,所述多个搁板在水平方向上朝向所述壳体的中心轴线延伸,所述中心轴线在所述壳体的中心处竖直地延伸,并且所述多个搁板与所述壳体的所述中心轴线竖直地不重叠或所述多个搁板与所述壳体的所述中心轴线在所述水平方向上间隔开。
4、根据本发明构思的另一方面,提供了一种自主驱动机器人,所述自主驱动机器人包括:储存单元,所述储存单元包括壳体和搁板,所述壳体提供用于储存物品的空间,所述搁板设置在所述壳体内部并且被配置成使得所述物品被装载在所述搁板上;操纵器,所述操纵器包括线性致动器和选择顺应性关节型机器人臂,所述线性致动器设置在所述壳体内部且在竖直方向上延伸,所述选择顺应性关节型机器人臂被称为scara臂并联接到所述线性致动器;和运输单元,所述运输单元联接到所述储存单元的底表面并且被配置成在地板上移动,其中,在所述储存单元中设置有多个搁板,所述多个搁板中的一些搁板被设置成与所述壳体的一个内壁相邻且在所述竖直方向上彼此间隔开,并且其他搁板被设置成与面向所述一个内壁的另一内壁相邻且在所述竖直方向上彼此间隔开,并且所述多个搁板朝向所述壳体的中心轴线水平地延伸,所述中心轴线在所述壳体的中心处竖直地延伸,并且所述多个搁板与所述壳体的所述中心轴线竖直地不重叠或所述多个搁板与所述壳体的所述中心轴线水平地间隔开,其中,所述scara臂包括至少两个水平关节。
5、为了实现上述目的,本发明构思的各方面提供了如下所描述的物品运输方法。
6、根据本发明构思的另一方面,提供了一种物品运输方法,所述物品运输方法包括:从中央控制系统向自主驱动机器人发送操作指令信号,其中,所述自主驱动机器人响应于所述操作指令信号而向所述中央控制系统发送响应信号;将所述自主驱动机器人移动到储物设备的手动端口;以及通过所述自主驱动机器人开始装载或卸载物品,其中,所述自主驱动机器人包括:储存单元,所述储存单元包括壳体和搁板,所述壳体提供用于储存物品的空间,所述搁板设置在所述壳体内部并且所述物品被装载在所述搁板上;操纵器,所述操纵器包括线性致动器和选择顺应性关节型机器人臂,所述线性致动器设置在所述壳体内部且在竖直方向上延伸,所述选择顺应性关节型机器人臂被称为scara臂并联接到所述线性致动器;和运输单元,所述运输单元联接到所述储存单元的底表面并且被配置成在地板上移动,其中,所述scara臂包括至少两个水平关节。
技术特征:1.一种自主驱动机器人,包括:
2.根据权利要求1所述的自主驱动机器人,其中,所述运输单元联接到所述储存单元的底表面并且被配置成在地板上移动。
3.根据权利要求1所述的自主驱动机器人,其中,所述scara臂包括第一臂和第二臂,
4.根据权利要求3所述的自主驱动机器人,其中,所述第二臂联接到所述第一臂的所述另一端的底表面。
5.根据权利要求3所述的自主驱动机器人,其中,所述scara臂还包括联接到所述第二臂的手,并且
6.根据权利要求1所述的自主驱动机器人,其中,在所述壳体的一侧中形成有开口,
7.根据权利要求6所述的自主驱动机器人,其中,所述物品具有门,并且
8.根据权利要求6所述的自主驱动机器人,其中,在所述储存单元中设置有四个搁板,并且
9.根据权利要求1所述的自主驱动机器人,其中,所述储存单元还包括联接构件,所述联接构件设置在所述壳体内部并且被配置成将所述操纵器与所述壳体彼此连接。
10.根据权利要求9所述的自主驱动机器人,其中,所述联接构件还包括框架,所述框架联接到所述壳体的一个内壁,并且所述框架被配置成联接到所述线性致动器以及从所述线性致动器分离。
11.根据权利要求1所述的自主驱动机器人,其中,所述物品包括前开式晶片传送盒(foup)。
12.一种自主驱动机器人,包括:
13.根据权利要求12所述的自主驱动机器人,其中,所述scara臂包括第一臂和第二臂,
14.根据权利要求12所述的自主驱动机器人,其中,所述储存单元还包括联接构件,所述联接构件设置在所述壳体内部并且被配置成将所述操纵器与所述壳体彼此连接。
15.根据权利要求12所述的自主驱动机器人,其中,在所述壳体的一侧中形成有开口,
16.根据权利要求15所述的自主驱动机器人,其中,在所述储存单元中设置有四个搁板,并且
17.根据权利要求16所述的自主驱动机器人,其中,所述物品包括门,所述门设置在所述物品的一个侧表面上,并且
18.一种物品运输方法,包括:
19.根据权利要求18所述的物品运输方法,其中,在所述储存单元中设置有四个搁板,并且所述四个搁板中的两个搁板被设置成与所述壳体的一个内壁相邻且在所述竖直方向上彼此间隔开,并且另外两个搁板被设置成与所述壳体的面向所述一个内壁的另一内壁相邻且在所述竖直方向上彼此间隔开。
20.根据权利要求18所述的物品运输方法,其中,所述scara臂包括第一臂和第二臂,
技术总结自主驱动机器人包括:储存单元,所述储存单元包括壳体和搁板,所述壳体提供用于储存物品的空间,所述搁板设置在所述壳体内部并且所述物品被装载在所述搁板上;操纵器,所述操纵器包括线性致动器和联接到所述线性致动器的选择顺应性关节型机器人臂;和运输单元,所述运输单元联接到所述储存单元,其中,设置有多个搁板,所述搁板中的一些搁板被设置成与所述壳体的一个内壁相邻且在所述竖直方向上彼此间隔开,并且其他搁板被设置成与面向所述一个内壁的另一内壁相邻且在所述竖直方向上彼此间隔开,并且所述多个搁板朝向所述壳体的中央部分延伸,但是延伸至到达所述壳体的所述中央部分之前的点。技术研发人员:白庚潭,金显旭,俞炳国,李承俊,张珉九,郑然富,车在爀,崔池旻,金瑄旿,闵庚俊,梁东勋,尹智源,李承俊,崔仁诚受保护的技术使用者:三星电子株式会社技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52106.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表