一种防撞激光枪头结构及激光焊接机器人的制作方法
- 国知局
- 2024-06-21 09:43:46
本技术涉及激光焊接机器人,尤其是一种防撞激光枪头结构及激光焊接机器人。
背景技术:
1、激光焊接机器人焊接自由度末端的激光枪头属于精密且昂贵的部件,在实际的示教或生产作业中,激光枪头属于与加工部件近距离接触的动作末端,极易发生碰撞,因此针对激光枪头碰撞受损的问题,亟需提出解决的方案。
技术实现思路
1、本申请针对上述现有技术中的缺点,提供了一种防撞激光枪头结构及激光焊接机器人,相对现有技术,在送丝杆安装路径上设置防撞传感器,由于先送丝后焊接的工艺,与加工件碰撞的送丝杆能够第一时间发出碰撞信号,控制机器人停机,从而避免对激光枪头造成碰撞、损坏。
2、本实用新型解决上述技术问题所采用的技术方案如下:
3、一种防撞激光枪头结构,包括激光枪头,所述激光枪头的侧部设置安装组件,所述安装组件的末端设置防撞传感器,所述防撞传感器的一端设置送丝杆,所述安装组件被配置为沿x方向、y方向、z方向调节送丝杆的安装位置。
4、进一步地,所述安装组件包括设置在激光枪头一侧第一安装板,所述第一安装板的一侧设置第二安装板,所述第二安装板的一侧设置第三安装板。
5、进一步地,所述第一安装板、第二安装板、第二安装板上均开设有腰形槽,所述第一安装板通过对应的腰形槽调节z轴方向的安装位置,所述第二安装板通过对应的腰形槽调节y轴方向的安装位置,所述第三安装板通过对应的腰形槽调节x轴方向的安装位置。
6、进一步地,所述防撞传感器为重载荷型弹簧防撞传感器。
7、进一步地,还包括设置于激光枪头一侧的连接组件。
8、进一步地,所述连接组件包括连接于激光枪头的连接块,所述连接块一端设置连接法兰。
9、一种激光焊接机器人,所述激光焊接机器人的执行末端设置防撞激光枪头结构。
10、与现有技术相比,本实用新型的有益效果为:
11、相对现有技术,本实用新型的激光枪头结构在送丝杆的安装路径上设置了防撞传感器,以送丝杆作为第一冲击对象,防撞传感器发出碰撞信号从而控制机器人停机,防止了后续对激光枪头可能造成的碰撞冲击,进而避免巨大的损失;送丝杆通过加强强度,能够改善送丝杆冲击的影响,解决了碰撞点的问题后,送丝杆在防撞传感器的弹性复位下回到原位,送丝杆的安装组件能够在x、y、z自由度对送丝杆微调,从而准确复位。
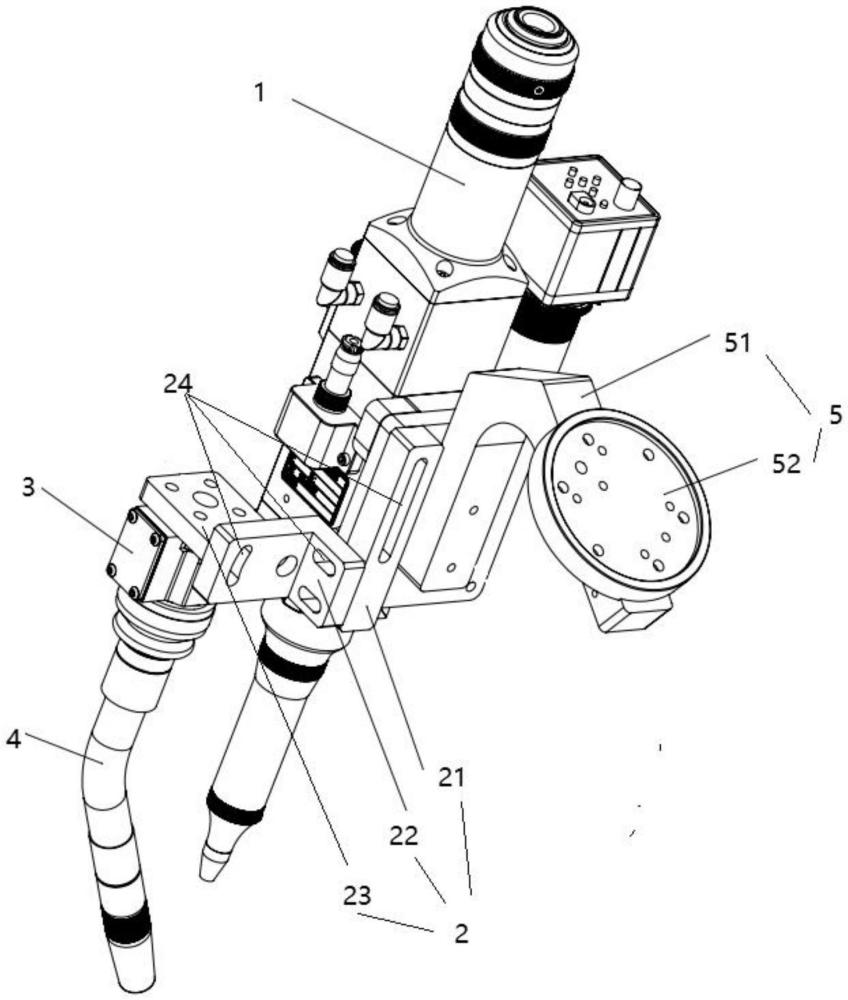
技术特征:1.一种防撞激光枪头结构,包括激光枪头(1),其特征在于:所述激光枪头(1)的侧部设置安装组件(2),所述安装组件(2)的末端设置防撞传感器(3),所述防撞传感器(3)的一端设置送丝杆(4),所述安装组件(2)被配置为沿x方向、y方向、z方向调节送丝杆(4)的安装位置。
2.如权利要求1所述的一种防撞激光枪头结构,其特征在于:所述安装组件(2)包括设置在激光枪头(1)一侧的第一安装板(21),所述第一安装板(21)的一侧设置第二安装板(22),所述第二安装板(22)的一侧设置第三安装板(23)。
3.如权利要求2所述的一种防撞激光枪头结构,其特征在于:所述第一安装板(21)、第二安装板(22)、第二安装板(22)上均开设有腰形槽(24),所述第一安装板(21)通过对应的腰形槽(24)调节z轴方向的安装位置,所述第二安装板(22)通过对应的腰形槽(24)调节y轴方向的安装位置,所述第三安装板(23)通过对应的腰形槽(24)调节x轴方向的安装位置。
4.如权利要求1所述的一种防撞激光枪头结构,其特征在于:所述防撞传感器(3)为重载荷型弹簧防撞传感器。
5.如权利要求1所述的一种防撞激光枪头结构,其特征在于:还包括设置于激光枪头(1)一侧的连接组件(5)。
6.如权利要求5所述的一种防撞激光枪头结构,其特征在于:所述连接组件(5)包括连接于激光枪头(1)的连接块(51),所述连接块(51)一端设置连接法兰(52)。
7.一种激光焊接机器人,其特征在于:所述激光焊接机器人的执行末端设置有如权利要求1-6任意一项所述的防撞激光枪头结构。
技术总结本技术提供了一种防撞激光枪头结构及激光焊接机器人,旨在解决现有技术激光焊接机器人焊接自由度末端的激光枪头易发生碰撞,进而使激光枪头发生损坏的问题。本技术相对现有技术,激光枪头结构在送丝杆的安装路径上设置了防撞传感器,以送丝杆作为第一冲击对象,防撞传感器发出碰撞信号从而控制机器人停机,防止了后续对激光枪头可能造成的碰撞冲击,进而避免巨大的损失;送丝杆通过加强强度,能够改善送丝杆冲击造成的变形影响,解决了碰撞点的问题后,送丝杆在防撞传感器的弹性复位下回到原位,送丝杆的安装组件能够在X、Y、Z自由度对送丝杆微调,从而准确复位。技术研发人员:周启洋,蔡金辉,张昊受保护的技术使用者:倍可机器人(无锡)有限公司技术研发日:20231026技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240618/15973.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表