基于声传感器阵列空域矩阵滤波的混叠鸟鸣声分离方法
- 国知局
- 2024-06-21 11:43:36
本发明涉及一种基于声学传感器阵列空域矩阵滤波技术的混叠鸟鸣声信号的分离方法,具体涉及一种利用空间声学传感器阵列采集野外同时发声的混叠鸟鸣声信号,利用发声鸟类目标声源的空间方位信息,采用声传感器阵列的空域矩阵滤波技术,实现混叠鸟鸣声信号分离的方法。
背景技术:
1、利用鸣声对鸟类进行识别的过程中,由于受鸟类的集群生活习性影响,导致多个鸟类群落之间的同时鸣叫现象很普遍,野外采集鸟鸣声数据通常包含多只、多物种鸟类鸣声的混叠鸣声信号,这给野外环境下的鸟鸣声识别带来困难,是影响野外环境下鸟鸣声物种识别的重要因素。
2、在人类语音识别领域,语音增强和分离是稳健语音识别的重要预处理步骤。语音分离问题的主要研究方法有听觉场景分析技术和盲源分离技术,听觉场景分析技术从人的听觉生理及心理特性出发,模仿人类听觉系统的非线性处理方法,许多研究者试图通过这一理论来实现人耳的“鸡尾酒会效应”,但算法复杂,很难用于实际应用。盲源分离技术基于独立成分分析(independent component analysis,ica)理论,假定各声源信号之间相互独立,并且满足瞬时混合模型,盲源分离算法在应用时需要事先估计目标声源个数,目标数量估计的准确性严重影响算法的分离性能,并且存在分离不确定性等问题。近年来,基于声传感器阵列和自适应波束形成技术的多通道语音分离技术逐渐成为语音分离的主流趋势,多通道语音分离系统除了可以获得阵元信号之间的更多声学特性信息,还可以利用目标声源的空间方位信息,使语音分离性能显著提升。
3、空域矩阵滤波技术是一种新兴的阵列信号处理技术,其数学基础是利用一个系数矩阵与阵列快拍数据相乘,输出仍保留阵元域数据的特性,这种矩阵运算称为矩阵滤波。具有空域滤波特性的矩阵滤波称为空域矩阵滤波。空域矩阵滤波的实现方法是,通过对空间方位划分通带和阻带,得到一个空域系数矩阵,对阵列数据滤波,该滤波器可以使通带内的信号无失真通过,同时阻带内信号被抑制,从而实现抑制阻带干扰的目的。由于空域矩阵滤波输出得到阵元域信号,可以很容易的实现混叠语音信号的分离。
技术实现思路
1、本发明的目的在于针对野外环境下多只、多种、同时发声的混叠鸟鸣声信号分离问题,本发明利用声传感器阵列和空域矩阵滤波技术,利用不同发声目标声源的空间方位信息差异,通过空间干扰抑制的方法,实现混叠鸟鸣声信号分离。
2、为达到上述目的,本发明通过下述技术方案实现。
3、本发明提出了一种基于声传感器阵列空域矩阵滤波的混叠鸟鸣声分离方法,该方法包括以下步骤:
4、s1.选取一种鸟鸣声作为目标信号;
5、s2.根据目标信号的波长计算声传感器阵元间距;
6、s3.根据计算的阵元间距,布放声传感器阵列,通过每个阵元分别接收多个声源的混叠鸟鸣声信号;
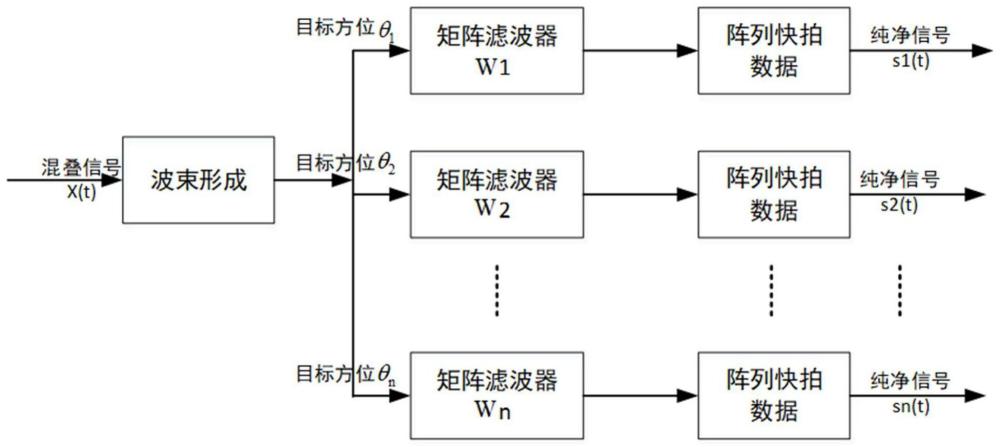
7、s4.利用阵列波束形成技术,根据声传感器阵列接收的混叠鸟鸣声信号估计发出目标信号的声源方位;
8、s5.对于每个发出目标信号的声源方位,分别设计空域矩阵滤波器,并使目标信号位于滤波器的通带区域,其他干扰信号位于滤波器的阻带区域;
9、s6.通过空域矩阵滤波器对声传感器阵列接收的混叠鸟鸣声信号数据进行滤波,获得各个声源方位的纯净目标信号;
10、s7.选取另一种鸟鸣声作为目标信号;
11、s8.重复步骤s2-s7,直到获得混叠鸟鸣声中所有的纯净鸟鸣声信号,实现混叠鸟鸣声信号的分离。
12、作为上述技术方案的改进之一,所述步骤s2中声传感器阵元间距d的计算式为:
13、
14、其中,λ为目标信号的波长。
15、作为上述技术方案的改进之一,所述步骤s3中,声传感器阵列为m个声传感器阵元组成的等间距直线声基阵。
16、作为上述技术方案的改进之一,所述步骤s3中,每个声传感器阵元采集的混叠鸟鸣声信号均满足下式:
17、
18、其中,t为时刻,xm(t)为第m个阵元接收的混叠鸟鸣声信号;m=1,2,…,m;m为总阵元数;sk(t)为第k个声源的鸟鸣声信号;k=1,2,...,k;k为总声源数;j为虚数符号;d为阵元间距;nm(t)为第m个阵元接收的环境噪声;λk为第k个声源鸟鸣声信号的波长;θk为第k个声源的入射方向。
19、作为上述技术方案的改进之一,所述步骤s4具体包括:
20、s4-1.利用阵列波束形成技术,根据声传感器阵列的阵型生成波束形成器;
21、s4-2.利用波束形成器对接收的混叠鸟鸣声信号中各个鸟鸣声信号在各个角度进行扫描测量,并输出每个鸟鸣声信号在每个角度的平均功率;
22、s4-3.判断每个鸟鸣声信号平均功率的极大值及极大值对应的角度,极大值对应的角度即为鸟鸣声信号对应的目标声源的方位。
23、作为上述技术方案的改进之一,所述步骤4-2中,输出的每个鸟鸣声信号在每个角度的平均功率,均满足下式:
24、pb(θ)=wbh(θ)rxwb(θ)
25、其中,θ表示波束形成器的扫描角度;pb(θ)表示波束形成器在扫描角度θ处输出的平均功率;上标h表示共轭转置;
26、wb(θ)为波束形成器在扫描角度θ处的加权向量,表达式为:
27、
28、上标t表示转置,rx为声传感器阵列接收混叠鸟鸣声信号的协方差矩阵,表达式为:
29、rx=e{xm(t)xmh(t)}
30、其中,e{·}表示期望运算。
31、作为上述技术方案的改进之一,所述步骤s5具体包括:
32、s5-1.根据得到的每个声源方位,获得声传感器阵列在各个声源方位的阵列流形矩阵;
33、s5-2.基于获得的声传感器阵列在各个声源方位的阵列流形矩阵,在每个声源方位设计空域矩阵滤波器,并使目标信号位于滤波器的通带区域,其他干扰信号位于滤波器的阻带区域,获得通带区域和阻带区域对应的阵列流形矩阵。
34、作为上述技术方案的改进之一,所述步骤s5-1中,声传感器阵列在各个声源方位的流形矩阵a均满足下式:
35、a=[a(θ1),a(θ2),...,a(θk),...,a(θk)]t
36、式中,a(θk)为第k个声源的方向向量,表达式为:
37、
38、作为上述技术方案的改进之一,所述步骤5-2中设计的空域矩阵滤波器w均满足下式:
39、w=vpvph(vpvph+vsvsh)-1
40、其中,vp为通带区域对应的阵列流形矩阵,vs为阻带区域对应的阵列流形矩阵;
41、
42、其中,p和s分别为通带区域和阻带区域离散化的点数,a(θp_p)为vp中的第p个向量,θp_p为vp中第p个扫描角度,a(θs_s)为vs中的第s个向量,θs_s为vs中第s个扫描角度,θp和θs分别为通带区域和阻带区域对应的角度区间。
43、作为上述技术方案的改进之一,所述空域矩阵滤波器输出y(t)均满足下式:
44、y(t)=was(t)+wn(t)
45、其中,s(t)为阵元接收的各个声源传来的的鸟鸣声信号,n(t)为阵元接收的环境噪声;空域矩阵滤波器使通带区域内的目标信号通过,阻带区域内的干扰信号被抑制,即满足下式:
46、
47、其中,a(θi)表示第i个声源的方向向量,θi为第i个扫描角度。本发明的优点体现于:
48、常规的自适应波束形成技术实现语音分离,通常得到待分离语音信号的波束域数据,需要经过复杂的数学运算转换为时域语音信号,本发明的优点是利用目标声源的空间方位信息,通过空域矩阵滤波方法在时域直接分离混叠鸟鸣声信号。带来的有益效果在于通过对混叠鸟鸣声信号的分离处理,为后端鸟鸣声信号的检测和识别提供纯净的鸟鸣声信号,提升后续信号处理的性能,同时降低了算法的复杂度。
本文地址:https://www.jishuxx.com/zhuanli/20240618/23152.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表