无缝管转运机器人的制作方法
- 国知局
- 2024-07-17 13:53:23
本技术涉及一种钢管搬运装置,具体是无缝管转运机器人。
背景技术:
1、无缝钢管在镀锌前后都需要放在库房中,通常是捆扎成一捆或者散放,为了防止钢管受潮或者受到磨损,通常在钢管下垫几块木块或者钢轨将钢管蓬起,在需要使用或者发货时通过行车将存放的钢管吊装至卡车或者镀锌加工待用位上,但是单纯用行车进行转运效率极低,行车需要将钢管在储存区、发货区卡车和镀锌加工待用位之间来回行动,在同时进行钢管镀锌和出库入库等任务时经常会忙不过来,影响企业生产效率,如果使用工人操作叉车的话则会增加成本支出影响企业利润率。
2、目前,专利号为cn210907593u的实用新型公开了一种全自动热旋压钢瓶成型转运装置,包括热旋压机,加热保温装置,钢管转运装置,热旋压送料下料机,钢管加热装置,倒渣装置,上料输送装置和顶底机;钢管加热装置位于上料输送装置的输出端;热旋压送料下料机的输出端抵至热旋压机的固定端;加热保温装置位于热旋压送料下料机的一侧;钢管转运装置位于热旋压送料下料机的一侧,用于将钢管加热装置中经加热的钢管运至热旋压送料下料机,还用于将热旋压送料下料机上加工完的钢管运至倒渣装置;倒渣装置的输出端抵至顶底机的入口。本申请的装置操作简便、产量稳定,可连续不间断生产,大大降低人工劳动强度,提高作业安全性;由于实现了自动化控制,保证产品质量可控及产品一致性。但是该专利主要用于在钢瓶生产时不断将钢管输入进热旋压机等设备中,并不能应对钢管在库房中的常规转运任务。
技术实现思路
1、针对上述现有技术存在的问题,本实用新型提供无缝管转运机器人,可以自动将需要转运的钢管转运至发货区卡车和镀锌加工待用位的行车近前,方便行车快速将钢管吊装至车辆或者加工供料区,可以有效地提高钢管转运效率。
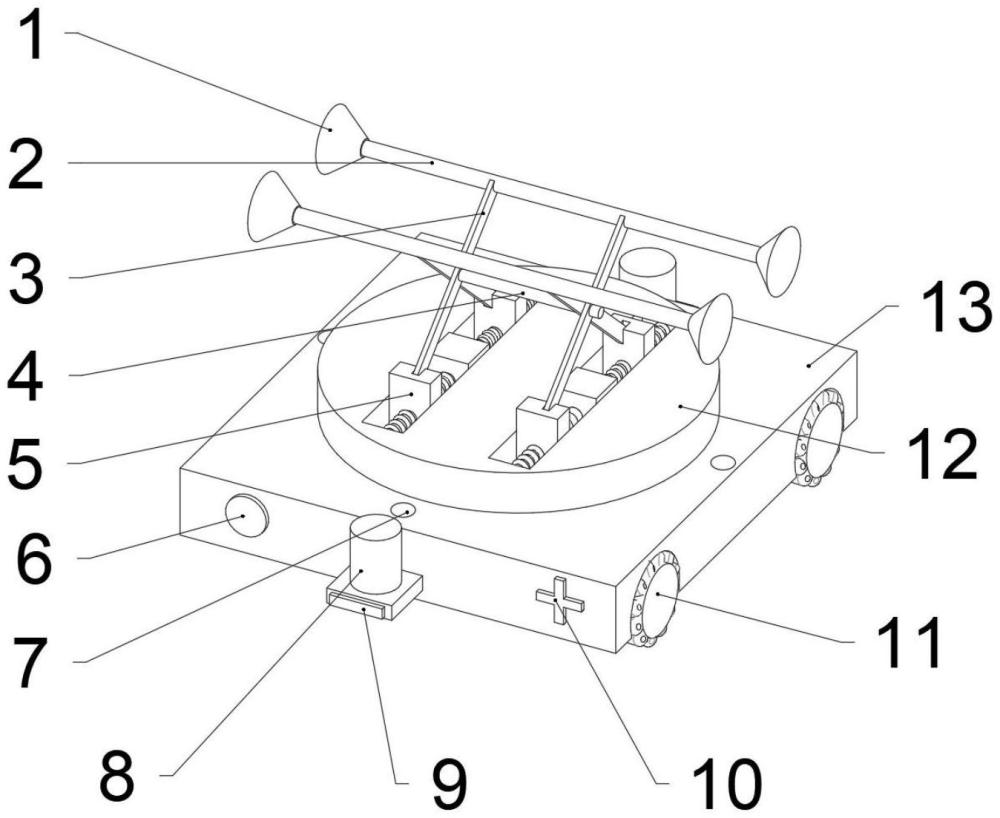
2、为了实现上述目的,本实用新型,无缝管转运机器人,包括防滚挡、钢管转运梁、叉臂、叉臂交叉轴、叉臂控制块、协作对位摄像头、钢管感应器、避障雷达、寻路摄像头、协作对位标记、麦克拉姆轮、钢管转运平台、转运平台本体、升降控制盒、升降控制螺纹杆、叉臂控制块滑槽、环状齿带、转运机器人驱动装置、转运平台本体驱动电机、电池包、无线充电装置,还包括铺设或者绘制于地面的导引线和标识线,转运机器人驱动装置两侧配备四个或者六个麦克拉姆轮,转运机器人驱动装置前后分别通过凸台安装避障雷达和寻路摄像头,前后避障雷达两边的转运机器人驱动装置表面分别固定安装协作对位摄像头和协作对位标记,且前后的协作对位摄像头和协作对位标记交错布置;转运机器人驱动装置上部中心处开圆形凹槽安装可旋转的钢管转运平台,钢管转运平台前后左右的转运机器人驱动装置表面呈十字型布置钢管感应器,钢管转运平台的转运平台本体下部套接环状齿带,钢管转运平台的转运平台本体上表面开设两条平行的叉臂控制块滑槽,叉臂控制块滑槽中部固定安装升降控制盒,升降控制盒两侧安装螺纹方向相反的升降控制螺纹杆,升降控制螺纹杆螺接叉臂控制块,叉臂控制块通过在转轴连接叉臂下端,同一叉臂控制块滑槽内的叉臂交叉形成一组升降臂,两组升降臂的交叉点处通过叉臂交叉轴连接,两组升降臂顶端通过钢管转运梁连接,钢管转运梁两端设有防滚挡;转运机器人驱动装置下部开凹槽安装无线充电装置。
3、另外,根据本实用新型上述实施例提出的无缝管转运机器人还可以具有如下附加的技术特征:
4、作为本实用新型的进一步改进方案,所述的转运机器人驱动装置包括转运平台本体驱动电机和电池包,转运机器人驱动装置内部通过支架安装麦克拉姆轮驱动电机、转运平台本体驱动电机和电池包,转运平台本体驱动电机的转轴通过齿轮啮合转运平台本体的环状齿带。
5、作为本实用新型的进一步改进方案,所述的转运机器人驱动装置内置控制机和无线通信装置。
6、作为本实用新型的进一步改进方案,所述的防滚挡配备三段式套筒。
7、作为本实用新型的进一步改进方案,所述的防滚挡边缘设有四到六个向外延伸的防滚臂,且防滚臂向外倾斜。
8、作为本实用新型的进一步改进方案,所述的钢管感应器为激光感应器。
9、借由上述方案,本实用新型至少具有以下优点:与常规直接使用行车将储存区的钢管运输至镀锌待用位上的方式相比,通过在储存区、发货区卡车和镀锌加工待用位之间增设专用的钢管转运机器人,让行车不必在储存区、发货区卡车和镀锌加工待用位之间来回移动,让行车只要将转运至发货区卡车和镀锌加工待用位的行车近前的钢管吊装至相应位置,可以有效地提高钢管转运效率。
技术特征:1.无缝管转运机器人,包括转运机器人驱动装置(13)和电池包(13-2),其特征在于,还包括铺设或者绘制于地面的导引线和标识线,转运机器人驱动装置(13)两侧配备四个或者六个麦克拉姆轮(11),转运机器人驱动装置(13)前后分别通过凸台安装避障雷达(8)和寻路摄像头(9),前后避障雷达(8)两边的转运机器人驱动装置(13)表面分别固定安装协作对位摄像头(6)和协作对位标记(10),且前后的协作对位摄像头(6)和协作对位标记(10)交错布置;转运机器人驱动装置(13)上部中心处开设圆形凹槽安装可旋转的钢管转运平台(12),钢管转运平台(12)前后左右的转运机器人驱动装置(13)表面呈十字型布置钢管感应器(7),钢管转运平台(12)的转运平台本体(12-1)下部套接环状齿带(12-5),钢管转运平台(12)的转运平台本体(12-1)上表面开设两条平行的叉臂控制块滑槽(12-4),叉臂控制块滑槽(12-4)中部固定安装升降控制盒(12-2),升降控制盒(12-2)两侧安装螺纹方向相反的升降控制螺纹杆(12-3),升降控制螺纹杆(12-3)螺接叉臂控制块(5),叉臂控制块(5)通过在转轴连接叉臂(3)下端,同一叉臂控制块滑槽(12-4)内的叉臂(3)交叉形成一组升降臂,两组升降臂的交叉点处通过叉臂交叉轴(4)连接,两组升降臂顶端通过钢管转运梁(2)连接,钢管转运梁(2)两端设有防滚挡(1);转运机器人驱动装置(13)下部开凹槽安装无线充电装置(14)。
2.根据权利要求1所述的无缝管转运机器人,其特征在于,所述的转运机器人驱动装置(13)包括转运平台本体驱动电机(13-1)和电池包(13-2),转运机器人驱动装置(13)内部通过支架安装麦克拉姆轮(11)驱动电机、转运平台本体驱动电机(13-1)和电池包(13-2),转运平台本体驱动电机(13-1)的转轴通过齿轮啮合转运平台本体(12-1)的环状齿带(12-5)。
3.根据权利要求1或2所述的无缝管转运机器人,其特征在于,所述的转运机器人驱动装置(13)内置控制机和无线通信装置。
4.根据权利要求1所述的无缝管转运机器人,其特征在于,所述的防滚挡(1)配备三段式套筒。
5.根据权利要求4所述的无缝管转运机器人,其特征在于,所述的防滚挡(1)边缘设有四到六个向外延伸的防滚臂,且防滚臂向外倾斜。
6.根据权利要求1所述的无缝管转运机器人,其特征在于,所述的钢管感应器(7)为激光感应器。
技术总结本技术涉及无缝管转运机器人,通过导引线和标识线为设备提供路径支持,让设备在工厂中准确地找到对应的位置,通过转运机器人驱动装置(13)的麦克拉姆轮(11)给平台提供足够的机动性,通过协作对位摄像头(6)和协作对位标记(10)让多个本专利能够协同工作完成对钢管的转运,通过钢管感应器(7)确定钢管相对本专利的位置,方便钢管转运梁(2)能够和钢管形成十字形,给叉臂(3)、叉臂交叉轴(4)和叉臂控制块(5)的升降提供足够的支持,让行车不必在储存区、发货区卡车和镀锌加工待用位之间来回移动,本技术可以自动将需要转运的钢管转运至发货区卡车和镀锌加工待用位的行车近前,方便行车快速将钢管吊装至车辆或者加工供料区,可以有效地提高钢管转运效率。技术研发人员:张学磊,李冠东,徐辉受保护的技术使用者:徐州市全球通精密钢管有限公司技术研发日:20231120技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240711/112096.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表