一种钢轨不平顺检测系统及其检测方法
- 国知局
- 2024-08-01 08:34:43
本发明涉及轨道检测,尤其是一种钢轨不平顺检测系统及其检测方法。
背景技术:
1、高速铁路因其舒适安全、便捷快速、运载能力强、能源消耗小等优势,成为我国经济社会发展的重要保障。随着高铁列车运行速度的逐步提升,钢轨的平顺性精度要求也越来越高。目前国内常见的测量方法是利用轨道检测车结合轨道控制网对轨道几何形状进行精密测量,但该方法测量成本高测量周期长且难以用于正在建设阶段的线路。弦测法也是一种传统的钢轨不平顺检测方法,其使用体积更小更容易控制的小型轨道几何状态检测仪,“以小推大”进行钢轨不平顺检测,但这种方法仅依靠轨距轮接触实现测量,容易造成线路偏移,较小的正矢偏差就会造成较大的曲线半径误差。因此,急需一种能够便捷高效、结构简单、测量结果准确的钢轨不平顺检测系统以及检测方法。
技术实现思路
1、本发明所要解决的技术问题在于提供一种钢轨不平顺检测系统。
2、本发明所要解决的另一技术问题在于提供一种应用上述检测系统的钢轨不平顺检测方法。
3、为解决上述技术问题,本发明的技术方案是:
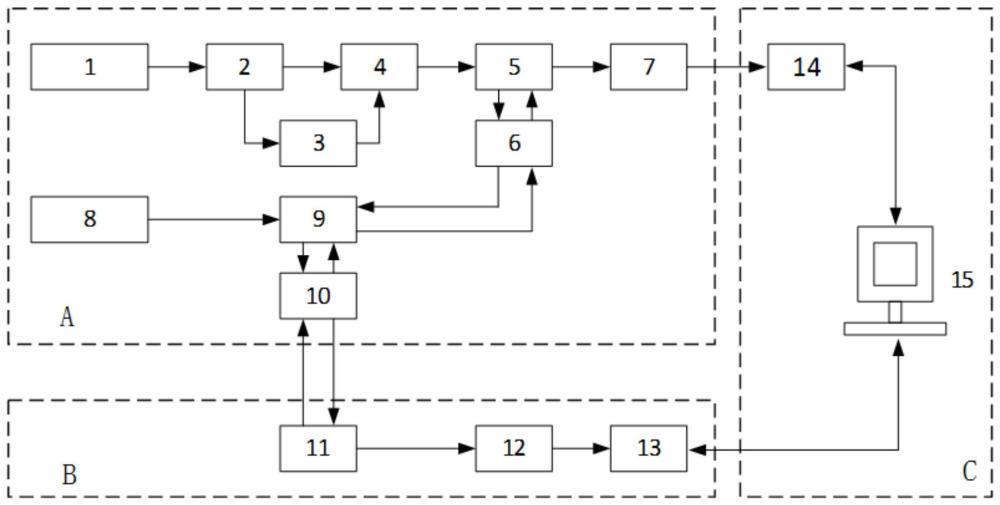
4、一种钢轨不平顺检测系统,包括发射端(a)、接收端(b)和信号处理端(c),其中,
5、所述发射端(a)包括外腔式可调谐激光器(1)、分束器ⅰ(2)、延迟光纤(3)、耦合器ⅰ(4)、环形器(5)、镀膜光纤(6)、光探测器(7)、红光激光器(8)、耦合器ⅱ(9)和准直器(10),所述镀膜光纤(6)上镀有半透半反膜,所述外腔式可调谐激光器(1)、分束器ⅰ(2)、耦合器ⅰ(4)、环形器(5)和光探测器(7)依次通过光纤串联连接,同时,分束器ⅰ(2)、延迟光纤(3)和耦合器ⅰ(4)通过光纤串联连接,所述环形器(5)和耦合器ⅱ(9)通过镀膜光纤(6)相连通,所述红光激光器(8)和准直器(10)分别与耦合器ⅱ(9)通过光纤连接;
6、具体来说,所述外腔式可调谐激光器(1)经三角波调制后发出调频连续波,激光经过由分束器ⅰ(2)、延迟光纤(3)和耦合器ⅰ(4)构成的马赫曾德尔干涉光路后进入环形器(5),调频激光通过镀有半透半反膜的镀膜光纤(6)后在耦合器ⅱ(9)处与红光激光器(8)发出的用于指示的可见红光耦合并且由准直器(10)发射至成像板(11),携带有目标距离信息的回光信号经所述镀膜光纤(6)与本振光耦合后,耦合光通过所述环形器(5)在光探测器(7)处干涉产生距离测量拍频信号;
7、所述接收端(b)包括成像板(11)、滤光片(12)和红外相机(13),所述准直器(10)设置在成像板(11)前方,所述成像板(11)置于红外相机(13)的镜头前方,所述红外相机(13)的镜头上固定有滤光片(12);
8、具体来说,所述成像板(11)一方面作为靶标对所述发射端(a)发出的测量光进行回光,另一方面对所述测量光的光斑进行成像;在所述红外相机前加入所述滤光片(12),防止环境中杂散光对测量过程的影响;成像板(11)和红外相机(13)的搭配实现了在较大视场下对测量光光斑的追踪;
9、所述信号处理端(c)包括数据采集卡(14)和计算机(15),所述光探测器(7)与数据采集卡(14)线路连接,所述数据采集卡(14)和红外相机(13)分别与计算机(15)线路连接;
10、具体来说,所述数据采集卡(14)对所述光探测器(7)处的距离测量拍频信号进行记录并与所述红外相机(13)拍摄的成像板光斑图像一起传入计算机(15);计算机(15)结合接收端在不同测量点的距离信息和测量光斑位置信息完成对钢轨的轨向信息和高低信息进行测量,确认钢轨是否存在轨向不平顺或高低不平顺。
11、优选的,上述钢轨不平顺检测系统,所述外腔式可调谐激光器(1)的调制范围设置为1545-1555nm,设置基础调制速率为100.08nm/s。
12、一种应用上述检测系统的钢轨不平顺检测方法,具体步骤如下:
13、(1)以待测钢轨的首端作为测量s点,以待测钢轨的末端作为测量e点,以待测钢轨的中点作为测量m点,在测量待测钢轨外并靠近s点一侧安装准直器(10),利用调频连续波作为测量光源,搭建调频连续波测量光路;
14、(2)将接收端安装在s点,记录数据处理端记录光探测器处的测量拍频信号并传至信号处理端,利用计算机软件设计带通滤波器进行软件滤波,分别滤出测量信号和辅助信号,根据辅助信号的峰值峰谷点确定重采样点对测量信号进行等光频间隔重采样,确定重采样信号频谱峰值点求解待测距离;
15、(3)设置阈值为80-130对红外相机拍摄的图片进行预处理,对将灰度值低于阈值的像素点的灰度值清零,消除环境杂散光的影响,对预处理后的图像进行高斯滤波处理,进一步消除环境中高斯噪声的影响,根据各像素灰度值确定测量光斑在相机坐标系下的像素坐标;
16、(4)分别将接收端移动至e点和m点,重复步骤(2)和步骤(3),得到e点和m点的距离测量值和光斑位置测量值;
17、(5)根据s、e和m点的测量结果可以确定由于钢轨不平顺导致测量光斑在相机坐标系下的横向偏差和纵向偏差,进而解算出钢轨的高低不平顺值和轨向不平顺值,完成对钢轨不平顺的检测。
18、优选的,上述钢轨不平顺检测方法,光探测器测得的测量拍频信号表达式ib(t)为:
19、ib(t)=2a0·{2cos[2π·(α(t)τmt+f0τm)]+2cos[2π·(α(t)τrt+f0τr)]
20、+cos[2π·(α(t)(τm+τr)t+f0(τm+τr))]+cos[2π·(α(t)(τm-τr)t+f0(τm-τr))]}
21、其中a0表示调频光源的振幅,f0是激光调制的初始频率,α(t)代表调频光源含有非线性量的实时调制速率,t代表时间,τm为待测距离的光程引起的出光和回光间的时间延迟量,τr为已校准过长度后的延迟光纤产生的时间延迟。
22、优选的,上述钢轨不平顺检测方法,测量光斑在相机坐标系下的像素坐标(x,y)表示如下:
23、
24、
25、其中红外相机的分辨率为n×m,aij代表预处理和高斯滤波后相机第i行第j列像素的灰度值。
26、优选的,上述钢轨不平顺检测方法,根据对所选取的三个测量点的测量结果即距离测量结果rs、re、rm和坐标测量结果(xs,ys)、(xe,ye)、(xm,ym),可以确定由钢轨不平顺导致测量光斑在相机坐标系下的横向偏差和纵向偏差:
27、
28、
29、优选的,上述钢轨不平顺检测方法,测量钢轨的高低不平顺值fh和轨向不平顺值fl表示如下:
30、fl=βlδx+γlδy
31、fh=βhδx+γhδy
32、其中βl、βh、γl、γh为像素坐标转换至世界坐标的转化系数,可以由激光跟踪仪标定得到,δx和δy是由于钢轨不平顺导致测量光斑在相机坐标系下的横向偏差和纵向偏差。
33、有益效果:
34、上述钢轨不平顺检测系统,利用调频连续波进行距离测量,同时利用红外相机对成像板上的激光光斑位置进行追踪,测距精度高,可以实现非合作目标测量,抗干扰能力强;利用红外相机对测量光斑位置进行定位,测量重复性高,不受阳光等环境因素的影响;结合钢轨上三个选定测量位置的距离信息和光斑像素坐标就可以解算出钢轨的高低不平顺测量值和轨向不平顺测量值,从而实现对钢轨的不平顺进行检测,尤其对单根钢轨的轨向不平顺和高低不平顺的便捷、高效、精确检测,该方法不需要复杂的数据处理过程,测量精度高,测量系统结构简单、调节方便、测量过程高效、测量结果准确。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232391.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表