一种全自动无人驾驶车辆智能休眠唤醒控制方法与流程
- 国知局
- 2024-08-01 08:36:44
本发明属于全自动化产品领域,涉及一种全自动无人驾驶车辆智能休眠唤醒控制方法。
背景技术:
1、无人驾驶地铁车辆在世界范围广泛应用,提高了轨道交通系统的运营安全性、服务品质以及经济性;我国在无人驾驶地铁技术研究和应用上处于初步发展阶段。综合性技术。车辆与信号系统的配合成熟度非常重要。
2、从自动化角度:无人驾驶轨道交通系统,以提升轨道交通运营安全性、服务品质,提高经济性为目的,充分利用现代电子、电气、机械以及信息技术的具有高度自动化水平的新一代城市轨道交通系统。在iec标准里面定义了自动化等级goa0-goa4五个等级,其中,goa3\goa4等级就是我们常说的无人驾驶,因为它不需要司机,取消了司机对车辆的控制,车辆的控制完全交给自动化系统。
3、无人驾驶有如下优势,首先是较高的安全性,自动控制、诊断,减少了人为操作失误;系统具有较高的冗余性,并具备丰富的远程恢复、旁路、隔离等功能;另外可以提升运营品质,柔性的运营时间表;准点,并具有较高的运输效率;较高的自动化水平提供更多人性化服务功能;经济性也较好,能够减少列车配置数量;较少人工投入;能耗水平低。无人驾驶地铁在世界多个国家和地区开通和成熟运用,具有相对成熟的应用业绩。
4、现有技术的技术方案一
5、现有无人驾驶地铁车辆的休眠唤醒方法智能化程度低,主要通过传统的车辆上电后各个子系统的上电自检、车辆静态测试、车辆高压测试、动态测试等检查车辆的实时状态,从而唤醒车辆进入待命状态;通过预休眠,包含蓄电池电压检测、总风风压检测、空调状态检测等,确认车辆可进行休眠后进行车辆的休眠动作,实现车辆的休眠。总之目前车辆实现休眠唤醒主要依据车辆的实时状态信息来完成,通过与车辆信号系统频繁的交互车辆状态信息与信号系统共同完成车辆的休眠唤醒流程。
6、现有技术的缺点
7、(1)现有技术的车辆休眠唤醒逻辑与信号系统的交互过于频繁,测试指令由信号系统发起,车辆执行后将状态信息反馈给信号系统,信号系统逐步控制车辆休眠唤醒步骤,并每一步都会有最大的测试容忍时间,如超出测试容忍时间没有测试成功,信号系统会自动判断休眠唤醒失败。由于频繁的交互导致车辆的休眠唤醒时间增长,车辆的整备时间大大增长,降低了车辆的运营效率。
8、(2)现有车辆的休眠唤醒流程缺少对车辆关键系统的预警信息以及关键系统的历史报警信息的关注,导致车辆忽略关键系统的预警及历史报警信息继续唤醒成功,可能造成正线运营发生故障导致车辆晚点或下线,车辆运行指标下降。
9、(3)现有车辆无法实时进行列车的中枢系统(列车网络控制系统)的实时检测,网络控制系统如有干扰、丢包、错误针等异常情况可能会造成车辆控制指令的误发、漏发等情况,从而导致车辆的控制功能异常或失效,导致车辆正线运行故障,甚至车辆下线,严重影响车辆运行指标。
技术实现思路
1、为了解决上述问题,本发明采用的技术方案是:一种自动无人驾驶车辆智能休眠唤醒方法,包括以下步骤:
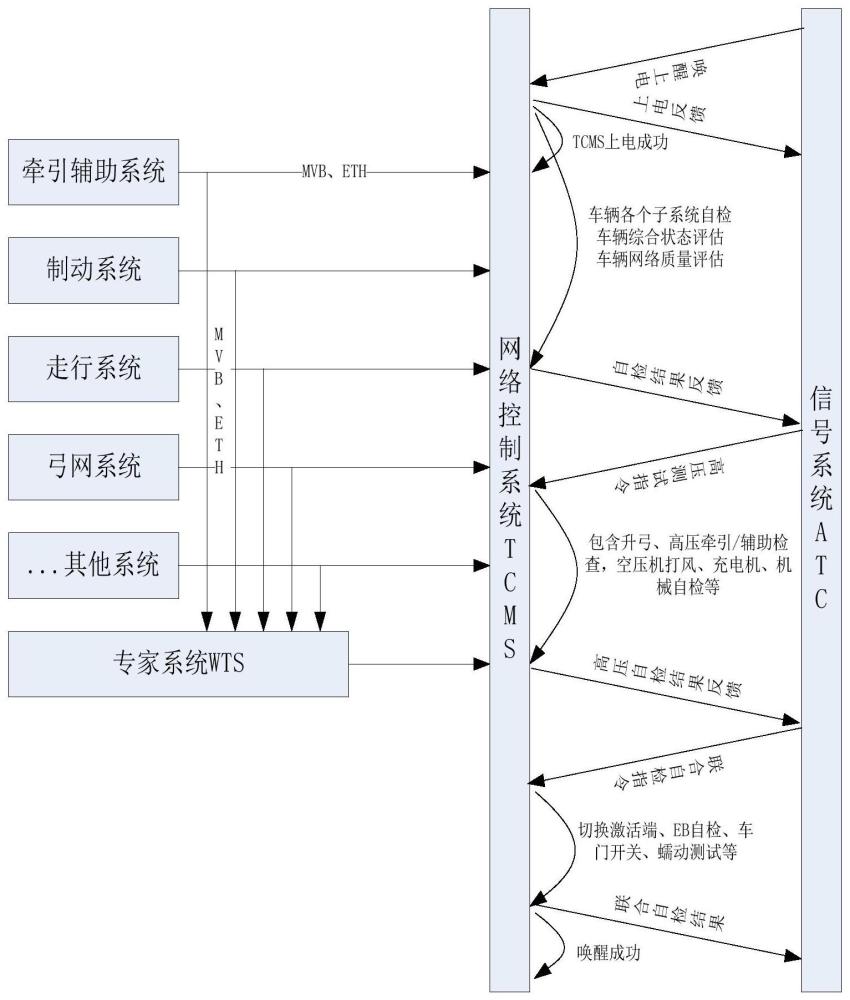
2、s1:接收到唤醒上电后,车辆网络控制系统tcms上电并进行自检,其他子系统同时进行上电自检工作,同时专家系统wts从总线上收集各个系统数据,评估车辆的综合状态和列车网络质量综合状态并反馈给tcms系统,由车辆网络控制系统tcms系统综合各个系统的自检状态、车辆综合状态、网络质量综合状态确定其上报给信号系统atc的自检结果,当车辆网络控制系统tcms将自检结果上报后,将继续进行自检,进行s2,如tcms上报自检失败,则结束车辆唤醒流程;
3、s2:信号系统atc反馈接收到车辆网络控制系统tcms的自检结果后,信号系统atc发送高压测试指令,车辆网络控制系统收到指令后,自动完成该高压测试的检查项,车辆自动升弓待1500v电压接入后进行车辆的高压部分检查,当车辆网络控制系统tcms上报高压自检成功,将继续进行自检流程,进行s3,如车辆网络控制系统tcms上报高压自检失败,则结束车辆唤醒流程;
4、s3:信号系统atc接收到车辆网络控制系统tcms反馈的高压自检成功后,由车辆与信号系统配合进行联合自检,联合自检成功后,车辆进入待命工况,实现自动无人驾驶车辆由休眠状态进入到唤醒状态。
5、进一步地:所述其他子系统同时进行上电自检工作:包含牵引、辅助、制动、车门、弓网、走行部、火警、充电机、空调、旅客信息系统、车辆柜门状态、车辆旁路按钮状态、车辆关键开关状态。
6、进一步地:所述高压部分检查,包括牵引/辅助系统的输入输出检查、空压机打风及气密性检查、充电机检查以及机械制动检查。
7、进一步地:所述车辆与信号系统配合进行联合自检包括切换激活端、紧急制动自检、开关门和蠕动测试。
8、进一步地:还包括休眠过程控制,包括如下过程:
9、列车以fam模式运行至休眠唤醒区域,对准停靠在休眠唤醒站台;
10、通信通道建立,由信号系统atc发送休眠请求,车辆tcms系统收到休眠请求信号后回复atc休眠请求确认,此时atc发送休眠命令给车辆tcms,tcms向atc反馈休眠命令确认的同时进行车辆的休眠前准备工作,包括检测总风状态、蓄电池状态、停空压机、空调、车辆关键故障、结合专家系统的车辆综合状态评价及网络质量的综合状态,待车辆所有休眠条件都满足后,tcms向atc发送休眠准备完成,atc发送车辆断电指令后由tcms负责执行车辆的断电。
11、进一步地:所述评估车辆的综合状态采用的过程如下:
12、通过对单车子系统的健康度计算、整车子系统健康度计算、整车综合评价计算,得出c整车的综合评价值,具体步骤如下。
13、单车子系统健康度计算:
14、
15、其中:a1为单车子系统得分(0-100),x为评估维度,y为子系统的权重比例;
16、整车子系统健康度计算:
17、b1=(a1+a2+a3…)/n;
18、其中:b1为整车子系统得分(0-100),ai为第i节车系统的得分,n为车辆的节数;
19、整车综合评分计算:
20、c=b1*p1+b2*p2+…+bn*pn;
21、其中:c为实际车辆综合得分(0-100),bn为整车子系统得分,pn为整车系统的权重比例。
22、进一步地:所述列车网络质量综合状态通过采集一段时间的mvb网络通信报文30s-180s和一个宏周期的波形数据,并按照配置参数对数据进行分析,自动得出每一个设备/端口的分析结果,生成分析报告;
23、通过采集列车mvb网络的通信报文及物理波形,从通信物理层、链路层以及网络层对列车网络进行全方位分析,输出列车网络质量分析报告。
24、本发明提供的一种全自动无人驾驶车辆智能休眠唤醒控制方法,经过对多个既有无人驾驶地铁休眠唤醒逻辑的集中调研,掌握了车辆在休眠唤醒过程中存在的问题,该发明提出了一种针对无人驾驶车辆全新的智能休眠唤醒的控制方法,缩短了车辆的休眠唤醒时间,运用大数据分析技术诊断车辆的关键系统状态,确保车辆状态完好方可进行唤醒,确保车辆安全运营,降低了车辆正线运行故障率,提升了运营效率。通过该方法控制使得
25、(1)车辆休眠唤醒逻辑与信号系统的交互简单,tcms智能控制车辆自检测试,效率大大提升,车辆的整备时间大幅缩短,提高了车辆的运营效率。
26、(2)对车辆的休眠唤醒流程增加了对车辆关键系统的预警信息以及关键系统的历史报警信息的分析,有效的避免了可能造成正线运营发生故障导致车辆晚点或下线,车辆运行指标提升。
27、(3)实时进行列车的中枢系统(列车网络控制系统)的检测,网络控制系统如有干扰、丢包、错误针等异常情况可避免在网络质量差的情况下车辆正常唤醒,避免造成车辆控制指令的误发、漏发等情况,从而导致车辆的控制功能异常或失效,导致车辆正线运行故障,甚至车辆下线,从而保障了车辆运行安全。
28、该方法具有以下优点:
29、(1)车辆智能休眠换休控制方法,简化交互流程,提升唤醒效率,大部分唤醒由车辆自主控制与检测,与传统的唤醒方法相比有以下特点:
30、1)交互过程简洁、车辆自主检测及控制能力强,从而降低了因车辆与信号系统频繁交互带来的数据丢失造成的车辆唤醒失败,直接影响车辆的运营效率。
31、2)车辆唤醒控制流程高度智能化,接收信号系统指令后车辆自主的按照预定顺序自主决策自检项目,减少了与信号系统的反复,缩短了车辆的唤醒时间,使车辆快速的进入待命工况,提升车辆的运营效率。
32、3)车辆唤醒条件充分考虑了车辆行车安全的多种条件,如车辆断路器的状态、旁路开关状态、关键继电器状态、柜门状态等。所有条件满足后方可进行唤醒操作。
33、(2)专家系统对子系统诊断及应用,应用大数据分析对车辆进行综合健康评估,根据评估结果进行车辆休眠唤醒控制。
34、(3)专家系统对列车控制总线的分析及应用,对轨道列车mvb网络通信质量评估和通信故障定位,根据评估结果进行车辆休眠唤醒控制。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232563.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
动车组加砂小车的制作方法
下一篇
返回列表