一种利用物体重力方法的自动激励装置及控制方法与流程
- 国知局
- 2024-08-01 08:39:40
本发明涉及钢轨测试,具体为一种利用物体重力方法的自动激励装置及控制方法。
背景技术:
1、为了保障铁路轨道结构安全,需要对轨道结构进行定期检测。利用加速度传感器进行钢轨固有频率检测,通过力锤(内置加速度传感器)对钢轨施加激励,并采集钢轨的激励与响应的时域信号,进行钢轨的模态分析来检测钢轨的结构安全性。为了保证数据的准确性,测量时要求每次只激励一次(不允许连击)并保证打激励一致。
2、在进行测量时,通常会用到两种激振方法,一种是力锤激励,另一种是激振器激励;但从理论角度讲,通过力锤激励法测试和激振器激励法测试所采集到的数据完全相同,只是在用力锤激励法测试时,往往选择加速度传感器位置不变,只移动力锤激励位置,对于激振器激励,往往是激励点位置不变,而改变传感器位置;对于钢轨模态测量,测量点固定传感器位置无法改变,且现有的激振器类型不易安装、激振力度不够,故选择力锤激励法,但是由于力锤敲击发为人手敲击,进行重复敲击时无法保证敲击位置与力度的一致性;人手使用力锤敲击随着长时间的工作,致使测试人疲劳进而出现误敲击、连击、测试时间过长、一致性不好等问题。
技术实现思路
1、鉴于上述缺点与不足,本发明提供了一种利用物体重力方法的自动激励装置及控制方法,调节激励大小可调节,且每次敲击的位置与力度一致,避免出现误敲击、连击的情况。
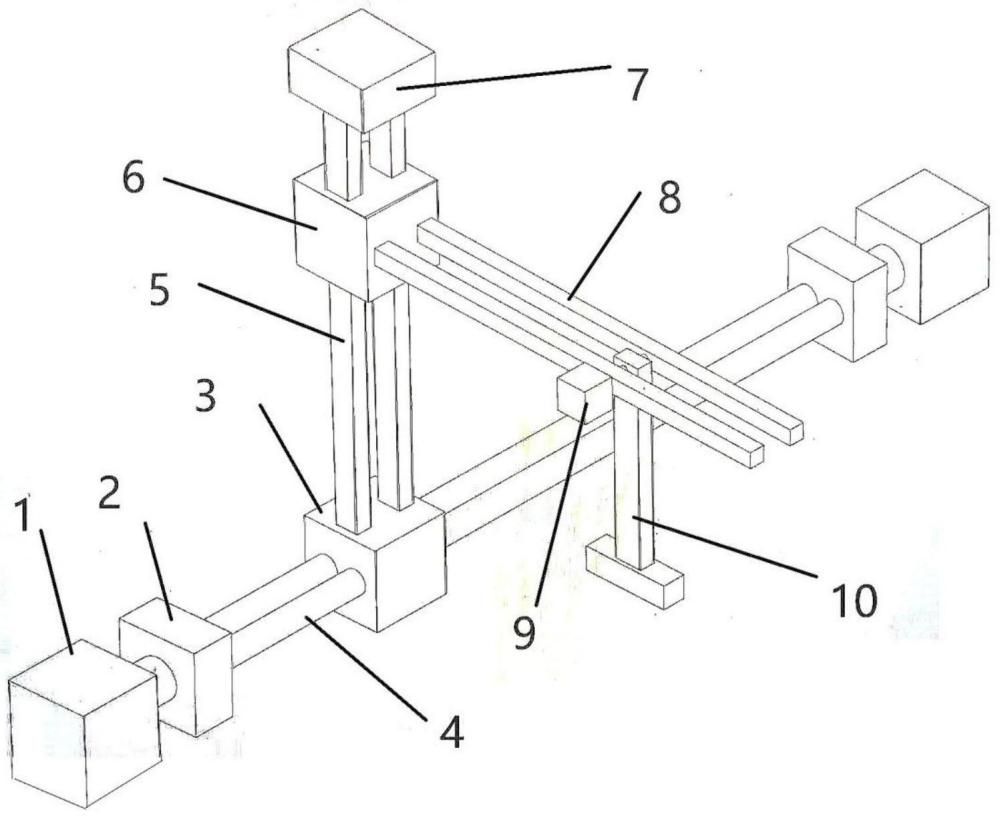
2、为了达到上述目的,本发明采用的主要技术方案包括:力锤、力锤纵向运动单元、力锤横向运动单元和力锤垂向运动单元,所述力锤纵向运动单元与钢轨可拆卸连接,与钢轨的纵向同方向设置,所述力锤垂向运动单元垂直设置在力锤纵向运动单元上,力锤横向运动单元垂直设置在力锤垂向运动单元上,力锤活动设置在力锤横向运动单元上,力锤上设置有传感器,所述力锤纵向运动单元、力锤横向运动单元和力锤垂向运动单元分别带动力锤在钢轨的纵向、钢轨的横向方向上移动。
3、所述力锤纵向运动单元包括第一电机、第一丝杠和夹紧装置,所述力锤纵向运动单元通过夹紧装置与钢轨连接,所述第一电机输出端连接第一丝杠,第一丝杠上套设有第一运动平台,通过控制第一电机使第一运动平台在第一丝杠上沿钢轨的纵向移动。
4、所述力锤垂向运动单元包括第二电机、第二丝杠和第二运动平台,所述第二电机输出端通过第二丝杠与力锤纵向运动单元的第一运动平台固定连接,第二运动平台套设在第二丝杠上,通过控制第二电机使第二运动平台在第二丝杠上沿钢轨的垂向移动。
5、所述力锤横向运动单元包括第三电机和第三丝杠,所述第三电机设置在所述第二运动平台内部,第三电机输出端连接第三丝杠,所述力锤通过连接杆设置在第三丝杠上,通过控制第三电机使力锤在第三丝杠上沿钢轨的横向移动,所述舵机与力锤连接,舵机控制力锤在垂直方向的角度。
6、一种利用物体重力方法的自动激励装置的控制方法,通过以太网将第一~第三电机和舵机与工业主机进行通信,工业主机通过对第一~第三电机发送位置控制命令调整力锤的空间位置;通过对舵机发送力锤击打力度,计算调整力锤初始偏转角度;击打开始后,通过计算的击打时间控制舵机的开关。
7、所述通过对舵机发送力锤击打力度,计算调整力锤初始偏转角度,具体为:
8、101)通过控制第一~第三电机,使力锤设置在击打测试位置;
9、102)将重力势能转化为动力势能:mgl(1-sinθ)=1/2mv^2,其中,m为力锤的重量,g为重力加速度,l为力锤相较于钢轨的击打垂直高度;通过公式得到力锤击打速度;
10、103)计算击打的瞬时冲击力f,f=mv/t,其中,t为瞬时接触时间;
11、104)计算压强p,p=f/s,其中,s为力锤与钢轨的接触面积;
12、105)计算击打力度f_测,f_测=ps_单,其中,s_单为击打面积;
13、106)则击打力度与力锤偏转角度的关系为:通过公式得到力锤偏转角度θ;
14、所述通过计算的击打时间控制舵机的开关,具体为:
15、201)根据击打摆长计算出单摆周期t,则设定力锤的击打时间t击为单摆时间的一半与瞬间接触时间t的和,即,t击=t/2+t。
16、本发明具有以下有益效果及优点:
17、本发明利用物体重力方法的自动激励装置及控制方法可以进行全自动测试,减少试验时间,降低人员的工作量,且可以调节激励大小,保持每次敲击的位置与力度一致,避免出现误敲击、连击的情况。
技术特征:1.一种利用物体重力方法的自动激励装置,其特征在于,包括:力锤、力锤纵向运动单元、力锤横向运动单元和力锤垂向运动单元,所述力锤纵向运动单元与钢轨可拆卸连接,与钢轨的纵向同方向设置,所述力锤垂向运动单元垂直设置在力锤纵向运动单元上,力锤横向运动单元垂直设置在力锤垂向运动单元上,力锤活动设置在力锤横向运动单元上,力锤上设置有传感器,所述力锤纵向运动单元、力锤横向运动单元和力锤垂向运动单元分别带动力锤在钢轨的纵向、钢轨的横向方向上移动。
2.根据权利要求1所述的一种利用物体重力方法的自动激励装置,其特征在于:所述力锤纵向运动单元包括第一电机、第一丝杠和夹紧装置,所述力锤纵向运动单元通过夹紧装置与钢轨连接,所述第一电机输出端连接第一丝杠,第一丝杠上套设有第一运动平台,通过控制第一电机使第一运动平台在第一丝杠上沿钢轨的纵向移动。
3.根据权利要求1所述的一种利用物体重力方法的自动激励装置,其特征在于:所述力锤垂向运动单元包括第二电机、第二丝杠和第二运动平台,所述第二电机输出端通过第二丝杠与力锤纵向运动单元的第一运动平台固定连接,第二运动平台套设在第二丝杠上,通过控制第二电机使第二运动平台在第二丝杠上沿钢轨的垂向移动。
4.根据权利要求1所述的一种利用物体重力方法的自动激励装置,其特征在于:所述力锤横向运动单元包括第三电机和第三丝杠,所述第三电机设置在所述第二运动平台内部,第三电机输出端连接第三丝杠,所述力锤通过连接杆设置在第三丝杠上,通过控制第三电机使力锤在第三丝杠上沿钢轨的横向移动,所述舵机与力锤连接,舵机控制力锤在垂直方向的角度。
5.根据权利要求1-4任意一项所述的一种利用物体重力方法的自动激励装置的控制方法,其特征在于:通过以太网将第一~第三电机和舵机与工业主机进行通信,工业主机通过对第一~第三电机发送位置控制命令调整力锤的空间位置;通过对舵机发送力锤击打力度,计算调整力锤初始偏转角度;击打开始后,通过计算的击打时间控制舵机的开关。
6.根据权利要求5所述的一种利用物体重力方法的自动激励装置的控制方法,其特征在于,所述通过对舵机发送力锤击打力度,计算调整力锤初始偏转角度,具体为:
7.根据权利要求5所述的一种利用物体重力方法的自动激励装置的控制方法,其特征在于,所述通过计算的击打时间控制舵机的开关,具体为:
技术总结本发明涉及一种利用物体重力方法的自动激励装置及控制方法,包括,力锤、力锤纵向运动单元、力锤横向运动单元和力锤垂向运动单元,所述力锤纵向运动单元与钢轨可拆卸连接,与钢轨的纵向同方向设置,所述力锤垂向运动单元垂直设置在力锤纵向运动单元上,力锤横向运动单元垂直设置在力锤垂向运动单元上,力锤活动设置在力锤横向运动单元上,力锤上设置有传感器,所述力锤纵向运动单元、力锤横向运动单元和力锤垂向运动单元分别带动力锤在钢轨的纵向、钢轨的横向方向上移动。本发明可以进行全自动测试,减少试验时间,降低人员的工作量,且可以调节激励大小,保持每次敲击的位置与力度一致,避免出现误敲击、连击的情况。技术研发人员:洪嘉希,蔡小勇,李志广,张文献,肖茂波,李佩聪,慕吉东,田浚,程恩伏,崔颖受保护的技术使用者:沈阳铁路信号有限责任公司技术研发日:技术公布日:2024/2/29本文地址:https://www.jishuxx.com/zhuanli/20240718/232726.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表