一种基于光电传感器的斜井防跑车门栏控制装置的制作方法
- 国知局
- 2024-08-01 08:42:24
本技术属于矿井设备,尤其涉及一种基于光电传感器的斜井防跑车门栏控制装置。
背景技术:
1、目前,现有技术通常使用编码器来计算矿车钩头的位置,该编码器安装在齿轮箱主轴上。然而,这种方法存在以下弊端:第一,由于编码器会不可避免地累积误差,因此需要经常进行深度校正以确保准确性。第二,编码器仅能计算钩头所处的位置,而实际矿车的长度会因携带的矿车数量而变化,从而导致矿车头尾与巷道门栏的距离也会随之变化。为了避免矿车与门栏发生撞击,需要在开关门时增加额外的提前量,但这样会导致控制盲区过大。从而降低跑车防护装置的性能,因此,这种方法的准确性和实用性存在一定局限性。现有技术控制盲区过大,重复精度不高,且控制过程繁琐。
2、通过上述分析,现有技术存在的问题及缺陷为:
3、1)累积误差问题:编码器在长时间运行过程中会不可避免地累积误差,这将影响矿车钩头位置的计算准确性。为确保准确性,需要对编码器进行频繁的深度校正,增加了系统的维护成本和工作量。
4、2)矿车长度变化问题:编码器仅能计算钩头位置,而实际矿车长度会因携带的矿车数量而变化。这导致矿车头尾与巷道门栏的距离也会随之变化,增加了矿车与门栏发生撞击的风险。
5、3)控制盲区过大:为避免矿车与门栏发生撞击,需要在开关门时增加额外的提前量。然而,这将导致控制盲区过大,从而降低跑车防护装置的性能,影响整个系统的效率。
6、4)重复精度不高:由于编码器累积误差和控制盲区过大的问题,现有技术的重复精度不高。这可能导致矿车在同一位置多次重复停车时,停车位置会有较大的偏差。
7、5)控制过程繁琐:现有技术需要对编码器进行频繁的深度校正,以及在开关门时增加额外的提前量。这些操作使得控制过程变得繁琐,增加了操作人员的工作负担。
8、6)实用性受限:由于现有技术存在以上问题,其在矿车定位和巷道门栏控制方面的实用性受到一定限制。可能需要探索更有效、准确和简便的方法来解决这些问题。
技术实现思路
1、针对现有技术存在的问题,本实用新型提供了一种基于光电传感器的斜井防跑车门栏控制装置。
2、本实用新型是这样实现的,一种基于光电传感器的斜井防跑车门栏控制装置,所述基于光电传感器的斜井防跑车门栏控制装置设置有:
3、光电传感器和微处理器;
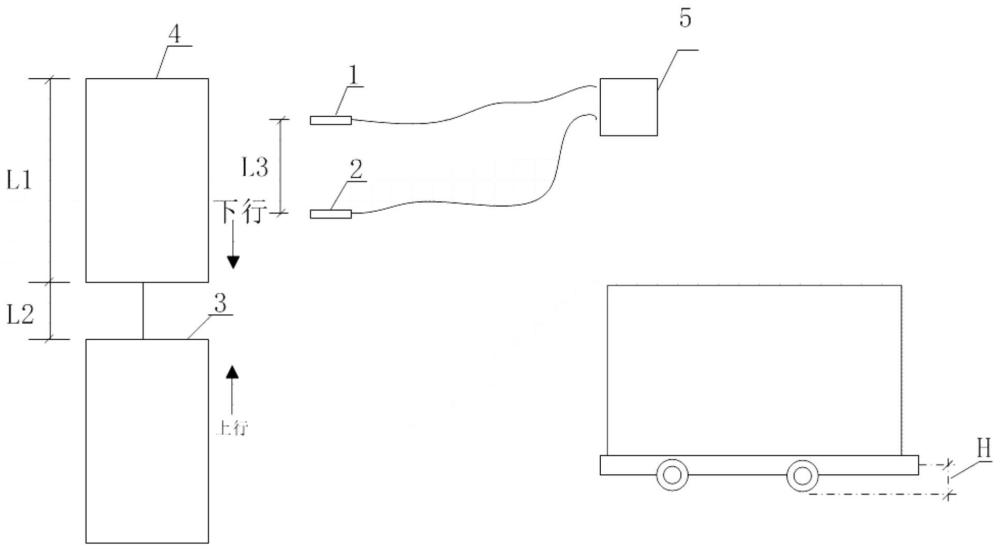
4、所述光电传感器共设置有两组,两组光电传感器分别与微处理器连接,两组光电传感器分别设置于两个测速点处;两个测速点沿巷道设置于挡车栏上方一定距离处。
5、进一步,所述光电传感器安装高度在矿车底部框架中心线左右。
6、进一步,所述两组光电传感器之间的距离要小于最短矿车长度。
7、进一步,所述两组光电传感器之间的距离要大于两节矿车之间空隙的距离。
8、进一步,所述第二组光电传感器距挡车装置上方距离:挡车装置开门时间×提升绞车最高允许速度+安全距离。
9、进一步,所述微处理器连接有第一间隔计时器、第二间隔计时器、第三间隔计时器和第四间隔计时器。
10、进一步,所述微处理器连接有时间继电器。
11、结合上述的技术方案和解决的技术问题,本实用新型所要保护的技术方案所具备的优点及积极效果为:
12、第一,本实用新型采用光电传感器对矿车通过两组光电传感器的时刻进行检测,控制门栏打开和关闭,重复精度高,而且控制盲区在合适范围之内。提高了矿车通过斜井防跑车门栏的安全性:通过光电传感器对矿车通过时刻和速度的检测,微处理器能够判断矿车的运行情况,从而有效地控制门栏的开闭,确保只有正常运行的矿车才能通过。解决了斜井跑车防护装置控制盲区过大的技术难题,将现有控制盲区从40~50米降到20米左右。
13、第二,本实用新型提高了矿井的生产效率:传统的斜井防跑车门栏控制方法需要人工操作,效率低下,而这种基于光电传感器的方法实现了自动化控制,可以大大提高矿井斜巷运输的生产效率。
14、本实用新型降低了人工操作的风险:传统的斜井防跑车门栏需要人工操作,存在人为操作失误和危险的风险,本实用新型基于光电传感器可以减少人工操作,降低了操作风险。
15、本实用新型可以实现实时监测和记录:通过光电传感器检测矿车通过的时刻和速度,微处理器可以实时监测和记录矿车的运行情况,为后续的数据分析和决策提供依据。
技术特征:1.一种基于光电传感器的斜井防跑车门栏控制装置,其特征在于,设置有:
2.如权利要求1所述的光电传感器的斜井防跑车门栏控制装置,其特征在于,所述光电传感器安装高度在矿车底部框架中心线左右。
3.如权利要求1所述的光电传感器的斜井防跑车门栏控制装置,其特征在于,所述两组光电传感器之间的距离要小于最短矿车长度。
4.如权利要求1所述的光电传感器的斜井防跑车门栏控制装置,其特征在于,所述两组光电传感器之间的距离要大于两节矿车之间空隙的距离。
5.如权利要求1所述的光电传感器的斜井防跑车门栏控制装置,其特征在于,第二组光电传感器距挡车装置上方距离:挡车装置开门时间×提升绞车最高允许速度+安全距离。
6.如权利要求1所述的基于光电传感器的斜井防跑车门栏控制装置,其特征在于,所述微处理器连接有第一间隔计时器、第二间隔计时器、第三间隔计时器和第四间隔计时器。
7.如权利要求1所述的基于光电传感器的斜井防跑车门栏控制装置,其特征在于,所述微处理器连接有时间继电器。
技术总结本技术属于矿井设备技术领域,公开了一种基于光电传感器的斜井防跑车门栏控制装置,包括光电传感器和微处理器;所述光电传感器共设置有两组,两组光电传感器分别设置于两个测速点处;两个测速点沿巷道设置于挡车栏上方一定距离处;两组光电传感器分别与微处理器连接。本技术采用光电传感器对矿车通过两组光电传感器的时刻进行检测,控制门栏打开和关闭,重复精度高,而且控制盲区在合适范围之内。提高了矿车通过斜井防跑车门栏的安全性:通过光电传感器对矿车通过时刻和速度的检测,微处理器能够判断矿车的运行情况,从而有效地控制门栏的开闭,确保只有正常运行的矿车才能通过。技术研发人员:李献国,张建中,堵暑光,张海峰,董宾,瞿祥淼,周睿,孙谦栋受保护的技术使用者:武汉市云竹机电新技术开发有限公司技术研发日:20230629技术公布日:2024/3/12本文地址:https://www.jishuxx.com/zhuanli/20240718/232902.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表