一种超导高速磁浮定位测速装置及方法与流程
- 国知局
- 2024-08-01 08:42:50
本发明涉及磁悬浮,尤其涉及一种超导高速磁浮定位测速装置及方法。
背景技术:
1、目前,磁悬浮列车技术正在高速发展。在国外,日本超导高速磁浮项目建设继续推进,美国的hyperloop瞄准了1000km/h速度进行试验。以中国航天科工的高速飞行列车为代表,我国也正在开展磁悬浮列车相关技术攻关。
2、磁悬浮列车无任何接触的悬浮制式要求定位测速系统需要采用无接触的方式,获取飞车的实时位置和速度信息,一方面传给地面牵引控制系统,完成牵引的闭环控制和分段供电;另一方面传给地面运行控制系统,实现安全防护、集中控制和调度。
3、牵引控制系统和运行控制系统均布局在地面,因此,定位测速信息最终需要传输至地面。根据定位测速系统传输和解析形式,可以将定位测速方案分为地面定位测速和车载定位测速两类。
4、现有主流磁浮列车的定位测速技术是地面定位测速方案,包括交叉感应环线技术、基于光学原理的结构化检测技术等;但是,地面定位测速系统往往需要全线铺设,存在硬件成本、安装成本和维护成本高的问题。因此,为了减小甚至消除此部分成本,需要采用车载定位测速的方式,通过车载设备完成位置和速度的测量,并通过无线通信系统传递至地面控制系统。无速度传感器技术能够利用现有磁浮线路上的已有设备,完成中高速区段的定位测速;但是低速下具有反电势小、精度低的缺点。
技术实现思路
1、本发明提供了一种超导高速磁浮定位测速装置及方法,能够解决现有技术中地面定位测速成本高以及车载定位测速精度低的技术问题。
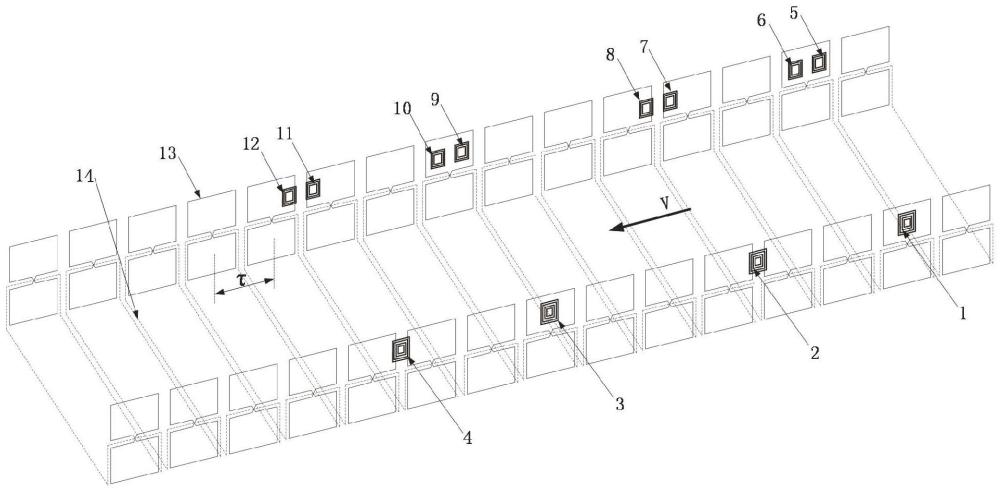
2、根据本发明的一方面,提供了一种超导高速磁浮定位测速装置,所述装置包括设置于磁浮列车上的四组天线单元、供电单元、第一信号处理单元、第二信号处理单元和第三信号处理单元;四组所述天线单元沿列车行进方法间隔设置;第一组天线单元与第二组天线单元、第三组天线单元与第四组天线单元的距离均为第一组天线单元与第三组天线单元、第二组天线单元与第四组天线单元的距离均为3l;每组所述天线单元包括一个发射天线和两个接收天线,其中,τ为相邻悬浮线圈中心线间距,l为地面直线电机的单相模组长度;
3、所述第一组天线单元的发射天线、所述第三组天线单元的发射天线、所述第二组天线单元的发射天线、所述第四组天线单元的发射天线与供电单元依次串联成回路,且所述第一组天线单元的发射天线与所述第二组天线单元的发射天线正接,所述第三组天线单元的发射天线与所述第四组天线单元的发射天线反接;所述第一组天线单元的第一接收天线、第一信号处理单元、所述第一组天线单元的第二接收天线、所述第三组天线单元的第二接收天线与所述第三组天线单元的第一接收天线依次串联成回路,且所述第一组天线单元的第一接收天线与所述第三组天线单元的第一接收天线正接,所述第一组天线单元的第二接收天线与所述第三组天线单元的第二接收天线反接;所述第二组天线单元的第一接收天线、第二组信号处理单元、所述第二组天线单元的第二接收天线、所述第四组天线单元的第二接收天线与所述第四组天线单元的第一接收天线依次串联成回路,且所述第二组天线单元的第一接收天线与所述第四组天线单元的第一接收天线正接,所述第二组天线单元的第二接收天线与所述第四组天线单元的第二接收天线反接;
4、每个所述发射天线用于产生高频电磁场,与每个所述发射天线对应的悬浮线圈在自身与所述发射天线的相对运动下产生感应电动势,每个所述接收天线在自身与所述悬浮线圈的相对运动下产生感应电动势;所述第一信号处理单元用于基于所述第一组天线单元与所述第三组天线单元的接收天线产生的感应电动势获取第一电压信号,所述第二信号处理单元用于基于所述第二组天线单元与所述第四组天线单元的接收天线产生的感应电动势获取第二电压信号;所述第三信号处理单元用于根据第一电压信号和第二电压信号获取磁浮列车的位置和速度。
5、优选的,四组所述天线单元中的所有天线的绕制方向均一致。
6、优选的,所述第三信号处理单元用于根据第一电压信号和第二电压信号获取磁浮列车的位置和速度包括:
7、所述第三信号处理单元用于分别提取第一电压信号和第二电压信号的外包络曲线,得到第一外包络曲线和第二外包络曲线;
8、所述第三信号处理单元还用于利用反正切获取第一外包络曲线与第二外包络曲线的相位角;
9、所述第三信号处理单元还用于基于相位角获取磁浮列车的位置;
10、所述第三信号处理单元还用于基于磁浮列车的位置获取磁浮列车的速度。
11、优选的,所述供电单元为高频电源。
12、根据本发明的另一方面,提供了一种超导高速磁浮定位测速方法,所述方法采用上述任一所述装置进行定位测速,所述方法包括:
13、供电单元对每个所述发射天线通入电流,以使每个所述发射天线产生高频电磁场;
14、与每个所述发射天线对应的悬浮线圈在自身与所述发射天线的相对运动下产生感应电动势;
15、每个所述接收天线在自身与所述悬浮线圈的相对运动下产生感应电动势;
16、所述第一信号处理单元基于所述第一组天线单元与所述第三组天线单元的接收天线产生的感应电动势获取第一电压信号;
17、所述第二信号处理单元基于所述第二组天线单元与所述第四组天线单元的接收天线产生的感应电动势获取第二电压信号;
18、所述第三信号处理单元根据第一电压信号和第二电压信号获取磁浮列车的位置和速度。
19、优选的,四组所述天线单元中的所有天线的绕制方向均一致。
20、优选的,所述第三信号处理单元根据第一电压信号和第二电压信号获取磁浮列车的位置和速度包括:
21、所述第三信号处理单元分别提取第一电压信号和第二电压信号的外包络曲线,得到第一外包络曲线和第二外包络曲线;
22、所述第三信号处理单元利用反正切获取第一外包络曲线与第二外包络曲线的相位角;
23、所述第三信号处理单元基于相位角获取磁浮列车的位置;
24、所述第三信号处理单元基于磁浮列车的位置获取磁浮列车的速度。
25、优选的,通过下式获取第一电压信号:
26、
27、式中,u1为第一电压信号,u11、u12分别为第一组天线单元的第一、第二接收天线基于悬浮线圈产生的感应电动势,u31、u32分别为第三组天线单元的第一、第二接收天线基于悬浮线圈产生的感应电动势,ut11、ut12分别为第一组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势,ut21、ut22分别为第二组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势,ut31、ut32分别为第三组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势,ut41、ut42分别为第四组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势。
28、优选的,通过下式获取第二电压信号:
29、
30、式中,u2为第二电压信号,u21、u22分别为第二组天线单元的第一、第二接收天线基于悬浮线圈产生的感应电动势,u41、u42分别为第四组天线单元的第一、第二接收天线基于悬浮线圈产生的感应电动势,ut11、ut12分别为第一组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势,ut21、ut22分别为第二组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势,ut31、ut32分别为第三组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势,ut41、ut42分别为第四组天线单元的第一、第二接收天线基于直线电机谐波磁场产生的感应电动势。
31、优选的,所述供电单元为高频电源。
32、应用本发明的技术方案,通过四组天线单元之间间距的限定以及发射天线反向串联和接收天线串联反接的方式,抵消地面直线电机谐波磁场的影响,且使得感应电动势增强了一倍,便于信号处理,以实现超导高速磁浮列车在运行过程中位置和速度的确定,为牵引控制系统提供速度、位置信息,从而实现列车的控制。本发明能够满足牵引控制系统和运行控制系统对于全线路全速域定位测速的需求,与传统的地面定位测速方法相比较,不需要沿线路在地面铺设相关设备,在成本和维护性上具有极大的优势。此外,本发明充分利用超导高速磁浮线路上的已有物体(悬浮线圈),完成列车的位置和速度的检测,与现有方案相比,具有更大的适用性,进一步降低了定位测速系统的成本。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232940.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表