一种自行走式钢轨轨距自动检测装置的制作方法
- 国知局
- 2024-08-01 08:47:04
本发明涉及铁路钢轨测量,具体涉及一种自行走式钢轨轨距自动检测装置。
背景技术:
1、随着科技的飞速发展和人们生活水平的提高,地铁、高铁、动车等出行方式已经作为人们出行首选工具之一,人们对于铁路轨道的安全性能也越来越关注。因此铁路轨道钢轨的内侧距离(简称轨距)检测的真实、准确、高效性在铁路轨道的安全与维护中,具有非常重要的意义,利用测出的数据来判断铁轨是否发生形变或铁轨之间的距离是否符合使用标准。
2、目前,前钢轨轨距连续测量主要设备是人力推动的轨检小车和大型的轨道检测车。轨检小车采用的是接触式检测,是将检测设备安装到一个类似于结构梁的承载结构上,检测设备与钢轨直接接触,人力推动轨检小车沿钢轨行进同时进行轨距检测。但轨检小车存在检测效率低,工作人员劳动强度大等缺点。大型轨道检测车采用的则是非接触式检测,是把检测设备安装到火车车厢或地铁车厢底部,检测设备不与钢轨直接接触,检测设备随着车辆的行进进行轨距检测。但大型轨道检测车存在体积大,设备复杂,灵活度低等缺点。
技术实现思路
1、针对目前轨距测量过程中存在的检测效率低,工作人员劳动强度大、体积大、设备复杂以及灵活度低等问题,本发明提供一种自行走式钢轨轨距自动检测装置,通过将激光摄像组件安装到一辆可自行走的小车上,通过激光摄像组件中的相机和激光传感器相互协同配合并采用非接触式检测测量出钢轨轨距,集成度和采集的准确度高且稳定性好,即具有体积小、灵活、机动性强等特点,又能有效提高检测效率和降低工作人员劳动强度。
2、本发明的技术方案如下:
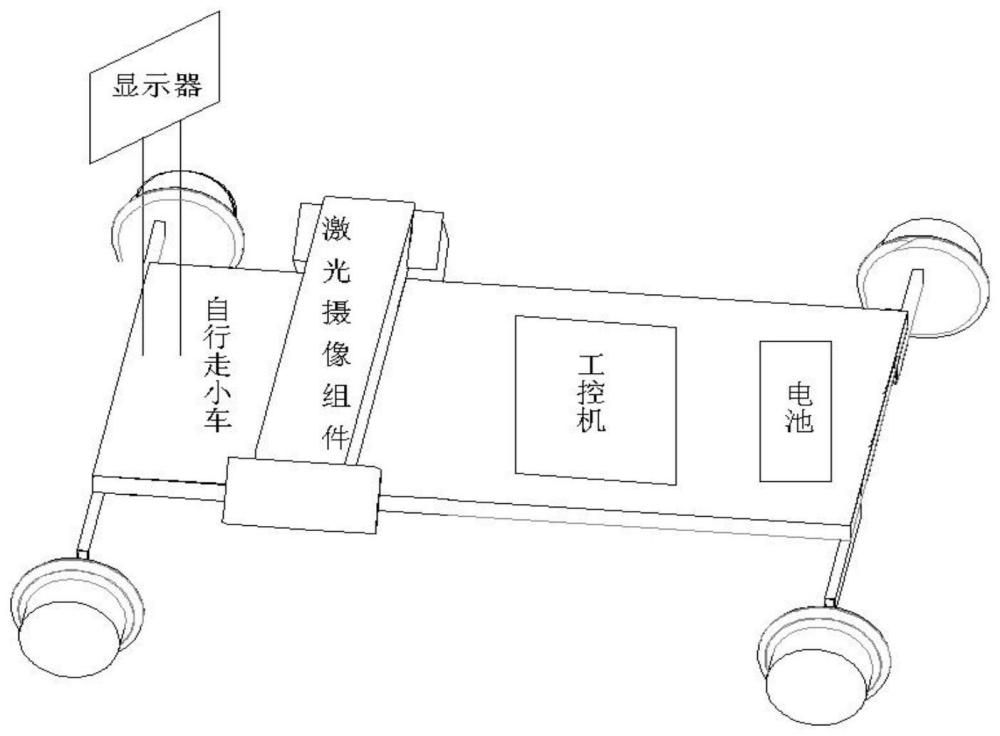
3、一种自行走式钢轨轨距自动检测装置,其特征在于,包括自行走小车、激光摄像组件、工控机和供电电源,所述供电电源分别与自行走小车、激光摄像组件和工控机相连,所述激光摄像组件与工控机相连;
4、所述激光摄像组件包括外壳以及设置于外壳内并相互集成的相机、激光传感器和控制主板,所述外壳横跨自行走小车且外壳两端下方均设置有视窗,自行走小车的左右两侧均设有相机和激光传感器且相机和激光传感器均通过相应视窗面向待测的钢轨内侧壁,所述相机和激光传感器均与所述控制主板相连,所述控制主板与所述工控机相连;
5、在自行走小车行进过程中,控制主板控制激光传感器每隔一段时间通过视窗向钢轨的内侧壁发射激光线,再控制相机通过视窗采集钢轨上激光线形成的钢轨轮廓线图像,相机将采集的钢轨轮廓线图像发送至控制主板中,控制主板将钢轨轮廓线图像传输至工控机,工控机采用轨顶点提取算法提取出轮廓线图像中第一轨道上的第一顶点和第二顶点,以及第二轨道上的第三顶点和第四顶点,并分别计算出经过第一顶点的第一直线与经过第二顶点的第二直线的第一交点坐标,以及经过第三顶点的第三直线与经过第四顶点的第四直线的第二交点坐标,根据第一交点坐标和第二交点坐标计算出钢轨轨距。
6、优选地,还包括脉冲信号传感器,所述脉冲信号传感器分别与激光摄像组件和供电电源相连,所述自行走小车包括本体和位于本体两侧的车轮,所述脉冲信号传感器设置在车轮上,用于采集车轮转动时输出的脉冲信号,并将脉冲信号传输至激光摄像组件中;
7、激光摄像组件收到作为触发信号的脉冲信号后,由控制主板控制激光摄像组件中的激光传感器根据脉冲信号的数量按周期通过视窗向钢轨两侧的内侧壁分别发射激光线。
8、优选地,还包括显示器,所述显示器分别与工控机和供电电源相连。
9、优选地,所述脉冲信号传感器设置于车轮内侧。
10、优选地,所述本体呈板状结构,沿钢轨宽度方向延伸的距离小于两个钢轨之间的宽度。
11、优选地,所述供电电源采用锂电池。
12、优选地,所述工控机采用型号为epe-6113lp4工控机,通过线缆分别与控制主板和显示器相连。
13、优选地,在采集到钢轨轮廓线图像后,采用滤波算法滤掉钢轨轮廓线图像中的周围环境干扰。
14、优选地,所述控制主板采用一主一从的控制机制,所述自行走小车左/右侧设置的相机和激光传感器为主组件,所述自行走小车右/左侧设置的相机和激光传感器为从组件,由所述控制主板控制主组件采集的频率和供电电源接入,所述控制主板控制从组件从主组件接收采集指令和取电。
15、本发明的技术效果如下:
16、本发明提供一种自行走式钢轨轨距自动检测装置,用于在轨检小车自动沿钢轨行进的同时进行非接触式钢轨轨距检测,包括自行走小车、激光摄像组件、工控机和供电电源,激光摄像组件包括外壳以及设置于外壳内并相互集成的相机、激光传感器和控制主板,外壳上设置有视窗,自行走小车的左右两侧均设有相机和激光传感器,自行走小车负责行进和承载设备及工作人员,供电电源负责提供设备各个部分的电源供应,在自行走小车行进过程中,由控制主板控制激光传感器每隔一段时间通过视窗向钢轨的内侧壁发射激光线,再控制相机通过视窗采集钢轨上激光线形成的钢轨轮廓线图像,相机将采集的钢轨轮廓线图像发送至控制主板进而再传输至工控机中,由工控机负责处理激光摄像组件采集的数据(钢轨轮廓线图像)并进行分析进而计算出钢轨轨距。本发明能够将现有的人力推动的轨检小车和大型的轨道检测车两种检测方式和检测设备的优点结合到了一起,又避开了它们的缺点,发明一种将激光摄像组件和工控机等检测处理设备安装到一辆自行走小车上,采用非接触式检测的自动化程度高、设备小巧灵活、人员劳动强度低的自行走式钢轨轨距自动检测装置。采用便携式和集成式设计,体积小、灵活度高、机动性强,能够大大降低工作人员的劳动强度,且激光摄像组件集成度高,稳定性好,采集钢轨轮廓线图像准确度高,可根据需求调节采集频率,检测过程中自动采集不需要人工控制,能够在轨检小车自动行进的过程中非接触式检测出钢轨轨距,有效提高检测效率。
技术特征:1.一种自行走式钢轨轨距自动检测装置,其特征在于,包括自行走小车、激光摄像组件、工控机和供电电源,所述供电电源分别与自行走小车、激光摄像组件和工控机相连,所述激光摄像组件与工控机相连;
2.根据权利要求1所述的自行走式钢轨轨距自动检测装置,其特征在于,还包括脉冲信号传感器,所述脉冲信号传感器分别与激光摄像组件和供电电源相连,所述自行走小车包括本体和位于本体两侧的车轮,所述脉冲信号传感器设置在车轮上,用于采集车轮转动时输出的脉冲信号,并将脉冲信号传输至激光摄像组件中;
3.根据权利要求1所述的自行走式钢轨轨距自动检测装置,其特征在于,还包括显示器,所述显示器分别与工控机和供电电源相连。
4.根据权利要求2所述的自行走式钢轨轨距自动检测装置,其特征在于,所述脉冲信号传感器设置于车轮内侧。
5.根据权利要求2所述的自行走式钢轨轨距自动检测装置,其特征在于,所述本体呈板状结构,沿钢轨宽度方向延伸的距离小于两个钢轨之间的宽度。
6.根据权利要求1所述的自行走式钢轨轨距自动检测装置,其特征在于,所述供电电源采用锂电池。
7.根据权利要求3所述的自行走式钢轨轨距自动检测装置,其特征在于,所述工控机采用型号为epe-6113lp4工控机,通过线缆分别与控制主板和显示器相连。
8.根据权利要求1所述的自行走式钢轨轨距自动检测装置,其特征在于,在采集到钢轨轮廓线图像后,采用滤波算法滤掉钢轨轮廓线图像中的周围环境干扰。
9.根据权利要求1至8之一所述的自行走式钢轨轨距自动检测装置,其特征在于,所述控制主板采用一主一从的控制机制,所述自行走小车左/右侧设置的相机和激光传感器为主组件,所述自行走小车右/左侧设置的相机和激光传感器为从组件,由所述控制主板控制主组件采集的频率和供电电源接入,所述控制主板控制从组件从主组件接收采集指令和取电。
技术总结本发明提供一种自行走式钢轨轨距自动检测装置,该装置包括自行走小车、激光摄像组件、工控机和供电电源,供电电源分别与自行走小车、激光摄像组件和工控机相连,激光摄像组件与工控机相连,激光摄像组件包括外壳以及设置于外壳内并相互集成的相机、激光传感器和控制主板,外壳上设置有视窗,自行走小车的两侧均设有相机和激光传感器,相机和激光传感器均与控制主板相连,控制主板与工控机相连。本发明采用便携式设计,体积小,重量轻,灵活度高、激光摄像组件集成度高,稳定性好,采集钢轨轮廓线图像的准确度高,检测过程中自动采集不需要人工控制,能够在轨检小车自动行进的过程中非接触式检测出钢轨轨距,有效提高检测效率。技术研发人员:许贵阳,张乖云受保护的技术使用者:许贵阳技术研发日:技术公布日:2024/3/31本文地址:https://www.jishuxx.com/zhuanli/20240718/233306.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表