一种可自动复钩的调车机的制作方法
- 国知局
- 2024-08-01 08:49:07
本技术涉及散料装卸,具体而言是一种可自动复钩的调车机。
背景技术:
1、翻车机卸车系统是用来翻卸铁路车辆的高效自动化设备,包括翻车机和调车机等设备,其中,调车机的作用是牵引或推送铁路车辆。在卸车作业中,翻卸后的铁路车辆由调车机推送到铁路空车线上集结成列,然后由铁路机车牵引拉走。然而,铁路车辆在翻车机系统作业并进入空车线后,车辆两侧的车钩均处于闭合状态。当相互连挂的两个车钩均处于闭合状态时,车钩是无法相互连挂的。因此,需要在铁路车辆相撞前,将相互碰撞的其中一个车钩打开,从而使得铁路车辆相撞时实现自动挂钩。在翻车机系统中,该道工序被称为复钩作业,是翻卸完成后铁路车辆与车列顺利挂钩的必要前置程序。目前,该道工序由人工操作来完成,主要分为两步,具体动作为:1、对车钩提杆进行提销作业,完成摘钩动作;2、通过外力将钩舌打开。为了替代人工,实现自动化复钩作业,《一种铁路运输作业复钩机构》(2022218975097)、《摘复钩机器人及其摘钩开钩作业方法》(202110496954 6),公开了一种智能复钩机器人,其上均设置有摘钩机构和掰钩机构,分别执行摘钩的动作和掰钩的动作,但是其结构复杂,成本较高。
技术实现思路
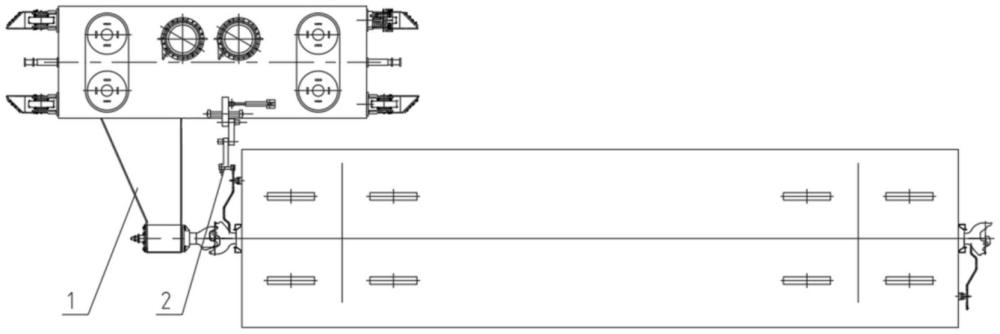
1、根据上述技术问题,而提供一种可自动复钩的调车机,将自动摘钩机器人安装于调车机上,利用自动摘钩机器人进行摘钩作业,利用调车机自身实现复钩作业,减少了机构,降低了成本。
2、本实用新型采用的技术手段如下:
3、一种可自动复钩的调车机,包括调车机和自动摘钩机器人;
4、所述自动摘钩机器人设置于所述调车机的车钩旁;
5、所述自动摘钩机器人包括移动机构和摘钩机构;
6、所述移动机构与所述调车机固定,用于带动所述摘钩机构于所述调车机上,沿所述调车机的车轨方向移动;
7、所述摘钩机构与所述移动机构的移动端连接,用于转动铁路车辆车钩的车钩提杆,实现车钩的摘钩动作。
8、优选地,所述摘钩机构包括第一摘钩臂、第二摘钩臂和勾爪,所述第一摘钩臂的一端与所述移动端铰接,另一端与所述第二摘钩臂的一端铰接,所述第二摘钩臂的另一端与所述勾爪铰接;所述第一摘钩臂与所述移动端铰接处设置有用于转动所述第一摘钩臂的第一转动驱动单元,所述第二摘钩臂与所述第一摘钩臂的铰接处设置有用于转动所述第二摘钩臂的第二转动驱动单元,所述勾爪与所述第二摘钩臂的铰接处设置有用于转动所述勾爪的第三转动驱动单元;
9、所述第一转动驱动单元的转动轴线垂直于所述第一摘钩臂的轴线;
10、所述第二转动驱动单元的转动轴线垂直于所述第二摘钩臂的轴线;
11、所述第三转动驱动单元的转动轴线平行于所述第二摘钩臂的轴线。
12、优选地,所述勾爪包括转板和安装在转板一端的勾爪本体,所述勾爪本体呈c形或u形,所述转板的另一端与所述第二摘钩臂铰接,所述转板所在平面平行于所述第二摘钩臂的端面。
13、第一转动驱动单元、第二转动驱动单元和第三转动驱动单元可以采用舵机、电机与齿轮配合等实现转动的机构,结构方式可以为多样只需实现两部件发生相对转动即可。
14、优选地,所述移动机构包括安装于所述调车机上的导轨,所述导轨的延伸方向与所述调车机的车轨方向平行,且所述导轨上安装有与所述导轨相配合的移动座,所述调车机上安装有用于驱动所述移动座沿所述导轨移动的移动驱动单元,所述移动座为所述移动端。所述移动驱动单元可以采用液压缸、电动推杆、丝杠等结构,结构方式可以为多样只需能够驱动移动座移动即可。
15、所述调车机为空车调车机,或为重车调车机。
16、当调车机将铁路车辆推送到位时,调车机静止等待,此时调车机与铁路车辆相互连挂的车钩均处闭合状态。此时,自动摘钩机器人行走到摘钩位,摘钩机构完成摘钩后,收回到原位状态。调车机后退行走,与铁路车辆分离的同时,调车机的钩舌将铁路车辆的钩舌打开,从而实现铁路车辆的自动复钩。在复钩过程中,调车机的钩舌始终处于闭合状态。
17、较现有技术相比,本实用新型具有以下优点:
18、本实用新型可以实现铁路车辆的自动复钩。本实用新型仅需摘钩机构,不需要掰钩机构就可实现自动复钩作业,与现有技术相比,结构紧凑,成本较低,可靠性高。
19、基于上述理由本实用新型可在调车机等领域广泛推广。
技术特征:1.一种可自动复钩的调车机,包括调车机,其特征在于,还包括自动摘钩机器人;
2.根据权利要求1所述的一种可自动复钩的调车机,其特征在于,所述摘钩机构包括第一摘钩臂、第二摘钩臂和勾爪,所述第一摘钩臂的一端与所述移动端铰接,另一端与所述第二摘钩臂的一端铰接,所述第二摘钩臂的另一端与所述勾爪铰接;所述第一摘钩臂与所述移动端铰接处设置有用于转动所述第一摘钩臂的第一转动驱动单元,所述第二摘钩臂与所述第一摘钩臂的铰接处设置有用于转动所述第二摘钩臂的第二转动驱动单元,所述勾爪与所述第二摘钩臂的铰接处设置有用于转动所述勾爪的第三转动驱动单元;
3.根据权利要求1所述的一种可自动复钩的调车机,其特征在于,所述移动机构包括安装于所述调车机上的导轨,所述导轨的延伸方向与所述调车机的车轨方向平行,且所述导轨上安装有与所述导轨相配合的移动座,所述调车机上安装有用于驱动所述移动座沿所述导轨移动的移动驱动单元,所述移动座为所述移动端。
4.根据权利要求2所述的一种可自动复钩的调车机,其特征在于,所述勾爪包括转板和安装在转板一端的勾爪本体,所述勾爪本体呈c形或u形,所述转板的另一端与所述第二摘钩臂铰接,所述转板所在平面平行于所述第二摘钩臂的端面。
5.根据权利要求1所述的一种可自动复钩的调车机,其特征在于,所述调车机为空车调车机。
6.根据权利要求1所述的一种可自动复钩的调车机,其特征在于,所述调车机为重车调车机。
技术总结本技术提供一种可自动复钩的调车机,包括调车机和自动摘钩机器人;所述自动摘钩机器人设置于所述调车机的车钩旁;所述自动摘钩机器人包括移动机构和摘钩机构;所述移动机构与所述调车机固定,用于带动所述摘钩机构于所述调车机上,沿所述调车机的车轨方向移动;所述摘钩机构与所述移动机构的移动端连接,用于转动铁路车辆车钩的车钩提杆,实现车钩的摘钩动作。本技术可以实现铁路车辆的自动复钩。本技术仅需摘钩机构,不需要掰钩机构就可实现自动复钩作业,与现有技术相比,结构紧凑,成本较低,可靠性高。技术研发人员:李晋,孙宁,于旺,高原,梅强,刘春,赵云,邢继涛,文艳美,尹向群受保护的技术使用者:大连华锐重工集团股份有限公司技术研发日:20230915技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240718/233470.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表