一种有轨电车防撞预警系统的制作方法
- 国知局
- 2024-08-01 08:49:29
本发明涉及预警系统,尤其涉及一种有轨电车防撞预警系统。
背景技术:
1、
2、根据有轨电车的事故统计,引起事故发生的主要危险因素有以下几种情况:行人进出站台不走人行横道、闯红灯;社会车辆在有轨电车运行区域行驶、停放;乘客越黄线候车;行人或者乘客向轨道内扔石头、金属;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于:通过长距离雷达探测模块实现前方车辆或障碍物在列车行进的轨道运行范围进行持续跟踪,进而近距离雷达探测模块对轨道内部及周围内目标进行二次确认,进而通过中央处理单元判断目标的危险系数,进行声光报警给予驾驶员提示,同时可以根据目标物与机车间的距离,以不同频率的“滴”声来提醒驾驶员,驾驶员可根据“滴”声的频率判断目标物距离机车的距离。
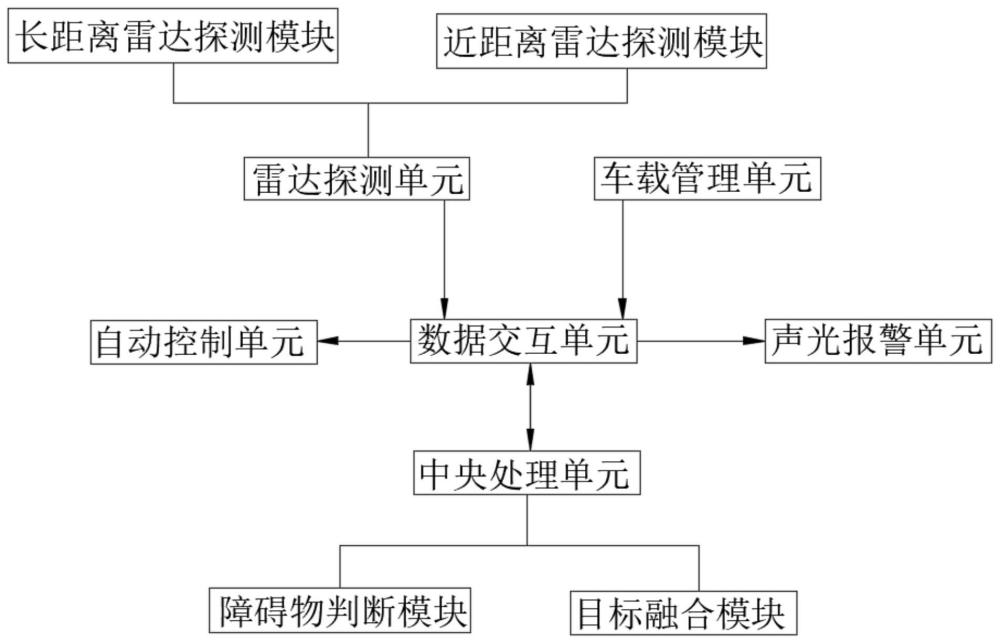
2、为了实现上述目的,本发明采用了如下技术方案:一种有轨电车防撞预警系统,包括雷达探测单元、声光报警单元、中央处理单元、数据交互单元和车载管理单元,其中数据交互单元用于连接雷达探测单元至中央处理单元,并将中央处理单元与声光报警单元和车载电源管理单元相互连接;
3、雷达探测单元包括长距离雷达探测模块和近距离雷达探测模块,通过长距离雷达探测模块和近距离雷达探测模块分别获取雷达探测信号发生至中央处理单元,其中雷达探测信号包括目标物的数量、目标物的体积、目标物的移动速度和目标物的与电车的距离st以及夹角θk;
4、车载管理单元获取有轨电车的实时运行参数发送至中央处理单元,其中实时运行参数包括有轨电车的三维加速度和三维转向角度信息以及实时经度、纬度、高度和车速;
5、中央处理单元包括障碍物判断模块和目标融合模块,障碍物判断模块获取雷达探测信号对障碍物进行判断得到障碍物危险系数,目标融合模块结合障碍物危险系数和实时运行参数进行障碍物目标融合得到预警风险值,根据预警风险值进行预警判断生成警示信号发送至声光报警单元;
6、声光报警单元获取警示信号并处理,其包括内提示模块和外提示模块,内提示模块用于对有轨电车内部的工作人员发出声音警告,外提示模块用于通过有轨电车的喇叭对有轨电车外的人员或车辆发出声音警告。
7、进一步的,长距离雷达探测模块的检测区域是以列车行进的轨道中心为顶点,边长为l1,角度为θ1的扇形面积,近距离雷达探测模块的检测区域是以列车行进的轨道中心为顶点,边长为l2,角度为θ2的扇形面积。
8、进一步的,计算障碍物危险系数的过程如下:
9、s101、在t0时刻获取长距离雷达探测模块的雷达探测信号,将雷达探测信号经过点云算法处理后获得三维点云,并将三维点云结合到三维空间坐标系中;
10、s102、获取中心点云的空间坐标(x0,y0,z0),将三维点云中的任意一点作为中心点云定义为中心,以半径r得到点云团,将点云团融合入三维空间坐标系中,依次获取中心点云相邻的近点云的空间坐标(xn,yn,zn);
11、s103、根据空间距离坐标公式计算中心点云与近点云之间的空间距离sp:
12、
13、s104、若sp≥r,则将对应的近点云纳入点云团集合中;
14、若sp<r,则排除对应的近点云;
15、s105、得到点云团的集合元素数量m,预设元素数量最低阈值mt,若m的数值大于mt,则将点云团标记为障碍物云团,并统计障碍物云团的数量mk,障碍物云团的数量mk越大,则表示障碍物的数量和体积越大,障碍物的危险系数越大,反之障碍物云团的数量mk越小,障碍物的的数量和体积随之减小,障碍物的危险系数也随之减小;
16、s106、在t1时刻获取长距离雷达探测模块的雷达探测信号,根据上述步骤,再次得到延后点云团集合,依次获取延后点云团集合内的点云团坐标值,根据空间距离坐标公式得到点云团集合中的每一点云团与延后点云团集合中的延后点云团之间的移动距离sl,其移动距离sl的积分总和值越大,则表示在(t1-t0)时刻内,障碍物的移动速度越快,障碍物的危险系数越大,反之移动距离sl的积分总和值越大,障碍物的移动速度随之减小,障碍物的危险系数也随之减小;
17、s107、以列车行进的轨道中心为顶点,以顶点延后点云团结合中的每一点云团为终点,得到点云团映射线,获取每一点云团映射线的中心夹角θ1;
18、s108、根据公式计算计算危险系数dfg:其中i=1、2、3、...n,n为延后点云团集合中的元素数值,e1为移动距离sl的权重修正系数,e2为中心夹角θl的权重修正系数,e3为障碍物云团的数量mk的权重修正系数。
19、进一步的,进行障碍物目标融合得到预警风险值并生成警示信号的过程如下:
20、s201、在t0时刻获取有轨电车的三维转向角度信息,以列车行进的轨道中心为顶,以轨道中心的延伸方向为边长,分析可知有轨电车的三维转向偏转角为θ;
21、s202、获取有轨电车的三维加速度am,根据公式计算有轨电车的速度倾向因子a:其中α为有轨电车的三维加速度对电车的速度倾向影响系数,β有轨电车的三维转向偏转角对电车的速度倾向影响系数;
22、s203、预设速度倾向值am,am为判断有轨电车转向可能性的阈值,当a小于am时,判断t0时刻有轨电车不进行转向,生成直行信号;
23、当a大于或等于am时,判断t0时刻有轨电车有转向倾斜,生成转向信号;
24、s204、获取有轨列车的经度w1、纬度w2、高度h和车速v0,计算预警风险值:
25、接收转向信号,根据以下公式计算预警风险值b:其中e4和e5分别为权重系数,其中λ为高度h与预警风险值的正相关系数;
26、接收直行信号,根据以下公式计算预警风险值b:其中e6和e7分别为权重系数,并且e6>e7。
27、s205、预设预警风险阈值bm,当b大于或等于bm时,判断有轨电车具有撞击风险,生成警示信号发送至声光报警单元;
28、当b小于bm时,判断有轨电车无撞击风险,不生成警示信号。
29、进一步的,还包括自动控制单元,自动控制单元包括自动避障算法模块和自动控制模块,自动算法避障模块用于生成避障路径,并根据避障路径得到避障加速度,根据避障加速度判断存在安全制动距离发出可避障信号,自动控制模块接收可避障信号,并对有轨电车进行智能调节实现紧急避障。
30、进一步的,生成避障路径并分析安全制动距离的具体方法如下:
31、s301、以获取警示信号的时刻为应急制动节点ts,以电车的前进方向为y轴,标记此时列车坐标的二维坐标位置为(xt,yt),获取目标物的与电车的距离st以及夹角θk,标记此时目标物的二维坐标位置为
32、s302、获取预设最小制动距离sm,基于安全避障的前提下计算有轨电车的避障加速度,获取车速v0,根据公式得到避障加速度为:其中δt为减速时间;
33、s303、获取预设最大避障加速度am,当a小于或者等于am时,安全制动距离等于或者大于sm;
34、当a大于am时,安全制动距离小于sm,此时避障不成功。
35、进一步的,所述数据交互单元包括监测模块、控制模块、计算模块、传感器模块、雷达模块、语音交互模块,其中监测模块实现车辆、惯导、传感器等通信协议转发,控制模块根据规划轨迹控制有轨电车的油门、刹车、方向盘自动调整,计算模块根据地图、目的地、障碍物规划路径,传感器模块实现目标识别及目标融合,雷达模块实现激光雷达的目标识别,语音交互模块实现目的地选择、启动关闭自动驾驶。
36、综上所述,由于采用了上述技术方案,本发明的有益效果是:
37、1、该有轨电车防撞预警系统,有轨电车实际运行中,通过长距离雷达探测模块实现前方车辆或障碍物在列车行进的轨道运行范围进行持续跟踪,进而近距离雷达探测模块对轨道内部及周围内目标进行二次确认,进而通过中央处理单元判断目标的危险系数,进行声光报警给予驾驶员提示,同时可以根据目标物与机车间的距离,以不同频率的“滴”声来提醒驾驶员,驾驶员可根据“滴”声的频率判断目标物距离机车的距离。
38、2、该有轨电车防撞预警系统,雷达探测单元采用毫米波雷达,适用性强且结果准确性高,在大雾和大雨等极端天气,驾驶员视线受影响时可以辅助驾驶员对前方行驶区域路况进行预判,提高警惕,预防事故的发生。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233499.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表